基于慧鱼模型的割草机器人设计
2017-05-08 23:08孙波刘永嘉王继慧
山东工业技术 2017年8期
孙波+刘永嘉+王继慧
摘 要:本课题用慧鱼模型设计并构建了一种小型自动割草机器人器人模型。慧鱼创意组合模型是一种技术含量较高,经拼接后形成的工程类模型,是展示科学原理和科学技术的理想教学器材。本文设计是以德国慧鱼创意积木所搭建而成的模拟机器人为基本构架,运用电脑界面板去控制驱动割草机器人器人,使机器人的行为动作达到我们的要求。通过慧鱼模型拼接组装,程序编制,任务达到要求,简明扼要的阐释了机械之间的配合关系,各种传感器安装使用,软件编写,实现对电磁线圈的控制,操作简单易懂,更加方便快捷。
关键词:慧鱼;智能机器人;循迹;边界识别
DOI:10.16640/j.cnki.37-1222/t.2017.08.180
1 割草机器人功能实现
1.1 割草机器人割草功能
割草机器人的割草功能实现是由电动机通过蜗轮蜗杆连接到头实现。小型电动机连接齿轮箱,然后在连接上刀头来控制刀片转速,实现割草过程。
1.2 边界识别功能
边界识别的实现是利用循迹传感器可以寻找到白色表面的黑色边界的功能,割草机器人左右轮各用直流双向电机驱动,所以通过设置两个轮子的转速从而达到控制转向的目的。
1.3 避障功能
割草机器人车头安装两个活动挡板,挡板底下安装两个微动开关I3,I4。当前方障碍推动挡板会触碰微动开关I3,I3触动,控制系统会控制机器人M1旋转,M2旋转,使机器人偏移避开障碍。
2 割草机器人的控制系统设计
2.1 软件介绍
慧鱼控制器模拟运动过程的实现需要通过ROBOPro软件来进行编程。ROBOpro软件在Windows平台上运行,使用图形化的控制单元,流程图式的图框编程过程。
2.2 控制程序编制
软件设计的程序大体可分为割草、循迹边界识别、避障和计时循环四大部分。程序将实现开始机器人前进→割草刀片旋转→避障→边界识别→循环计时等动作。
a.子程序。
① Random。该程序执行,初始值为0,一个路径传至random计数量,另一个路径执行值为一,进行判断Z>15是否成立,若为否则+1继续进行判断,并且传至下一个程序,同时等待0.06秒后继续判断。若为是,则重新开始循环。
② Turning random。转向程序是循迹的反应程序,程序运行,电动机M1M2同时顺时针旋转,机器人后退,然后延时0.5秒后,M1逆时针转动,M2继续顺时针转动,完成机器人后退转向。最后根据随机计数模块给定的计数值,等待执行后M1M2同时逆时针转动,机器人继续前进。
③Avoiding right。该子程序为右避障程序,程序执行,电动机M1M2顺时针转动,机器人后退,后退60毫米后停止等待,接收到信号时,机器人电动机M1继续顺时针转动,M2逆时针转动,机器人割草机器人完成转弯,转55毫米距离后停止等待,之后接收到信号停止等待0.5秒后前进。
④Avoiding left。该子程序为左避障程序,程序执行,电动机M1,M2顺时针转动,机器人后退,后退60毫米后停止等待,接收到信号时,机器人电动机M1逆时针转动,M2顺时针转动,机器人割草机器人完成转弯,转70毫米距离后停止等待,之后接收到信号停止等待0.5秒后前进。
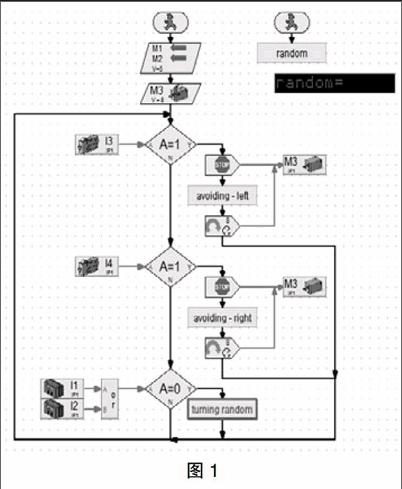
b.主程序。将每个字程序嵌入到主程序中,完成主程序图。主程序启动,电机M1,M2,M3同时启动,随机计数程序同时启动。紧接着通过I3,I4判断A是否为零,若为零则进行避障程序,若不为零,则继续通过I1,I2判断A(I1,I2的逻辑关系)是否为零。若为零则进行循迹子程序,若不为零则返回上一程序继续循环。主程序图如下:
3 割草机器人的运行调试
总体来说,整个智能车系统的构建满足了设计的需求。由于设计和其他客观条件的限制,在调试过程中进行了一些改进。主要有以下两个方面:(1)循迹系统本来运用一个循迹调节线路,可是在运行过程中出现了卡死跟无法灵活调整方向的现象,后来重新设计,后采用两个调节线路,使机器人更加智能化化调节自身行驶路线;(2)在调试过程中,增加了一个随机计数过程,此过程增加了割草机器人每个环节的连贯性和整体的智能性。
4 结论
本次设计构建割草机器人模型,此模型是以慧鱼创意组合模型为平台,通过ROBO TX接口板与ROBO Pro软件的程序设计形成了自动循迹避障割草功能。本设计通过传感器判断并檢测障碍物、通过轨迹传感器进行循迹,并对割草机器人的循迹、避障功能进行了研究,完成了硬件制作及软件设计,成功实现了自动割草循迹智能避障功能。
参考文献:
[1]朱世强,王宣银.机器人技术及其应用[M].浙江大学出版社,2001.
[2]罗大斌.机电产品模型设计及指导[M].机械工业出版社,2008.
[3]翁海珊.机械原理与机械设计课程实践教学汇编[M].高教出版社,2008.
[4]慧鱼六合一手册[S].北京中教仪科技有限公司.北京,2005.
[5]毛茂林.慧鱼创意模型试验教程[M].西南交通大学出版社,2010.
[6]郭洪红.工业机器人技术[M].西安电子科技大学出版社,2006.
[7]朱学敏.慧鱼模型指导书[M].机械工业出版社,2010.
猜你喜欢
科技传播(2017年6期)2017-05-27
卷宗(2016年12期)2017-04-19
电脑知识与技术(2017年5期)2017-04-08
科技创新导报(2016年23期)2016-12-23
计算机教育(2016年10期)2016-12-19
科教导刊·电子版(2016年24期)2016-10-29
电脑知识与技术(2016年17期)2016-07-23
无线互联科技(2015年6期)2016-03-05
中关村(2015年3期)2015-03-10
电子世界(2004年6期)2004-07-27