
一种无人艇载导航雷达的设计
2017-05-18 13:29张波鉴福升郑刚王磊李英军
科技视界 2016年19期
张波 鉴福升 郑刚 王磊 李英军

[摘要]无人艇栽雷达是导航避障的重要的手段,低功耗、体积小等特点,文中设计了一种基于FMCW体制的无人艇载导航雷达,对其波形进行了设计。计算了有关参数。
[关键词]无人艇;导航雷达;FMCW
0引言
无人水面艇(unmanned surface vessel,简称USV),是一种无人操作的水面舰艇,分为自主控制和遥控两种类型。主要用于执行危险以及不适于有人船只执行的任务。配备了先进的控制系统、传感器系统、通信系统和武器系统后,可以执行多种战争和非战争军事任务。
无人艇的侦测手段主要为雷达和光电等设备,雷达受天气的影响较小,光电设备则在雨雾等天气下工作能力大大降低。由于无人艇载重有限,因此其上的设备均需要轻量型,低功耗等等。
无人水面艇载雷达是无人艇航行避障、对海/低空搜索、武器制导的关键设备,其性能直接决定了无人艇的作战效能。从世界范围来讲,无论是军用还是民用船舶,大面积使用的仍然是磁控管导航雷达,甚至连数字信号处理技术都未广泛使用,但是近几年来,由于世界海洋产业的迅速发展,对导航雷达的要求越来越高,固态发射机、相控阵技术已经开始得到应用,军用电子器件的超常规发展,也大幅度降低了固态发射机与数字信号处理硬件的成本,导航雷达的技术也开始加速更新。
1采用FMCW體制的雷达波形设计
由于无人艇排水量较小,能量供应有限,因此其上的导航雷达必须采用轻量型,低功耗设计。而采用连续波线性调频(FMCW)自差频体制可以实现全固态化低功耗,高可靠性,对周围环境电磁干扰低,且不易被干扰,距离分辨力高,大时间带宽积,灵敏度高,以及抗有源干扰性能好,发射峰值功率低、结构简单、成本低,适合批量成产。等特点。雷达工作在通用导航X波段9.300GHz-9.800GHz,其中9.300GHz-9.500GHz为国际专用导航雷达频段,9.500GHz~9.800GHz国际导航雷达扩充频段。
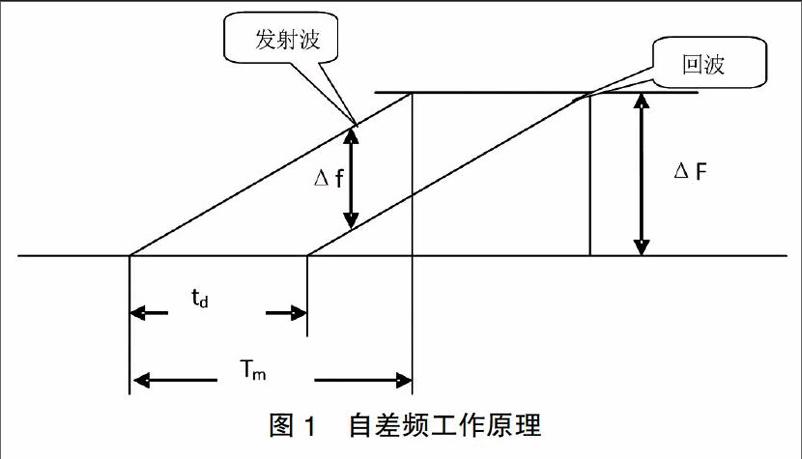
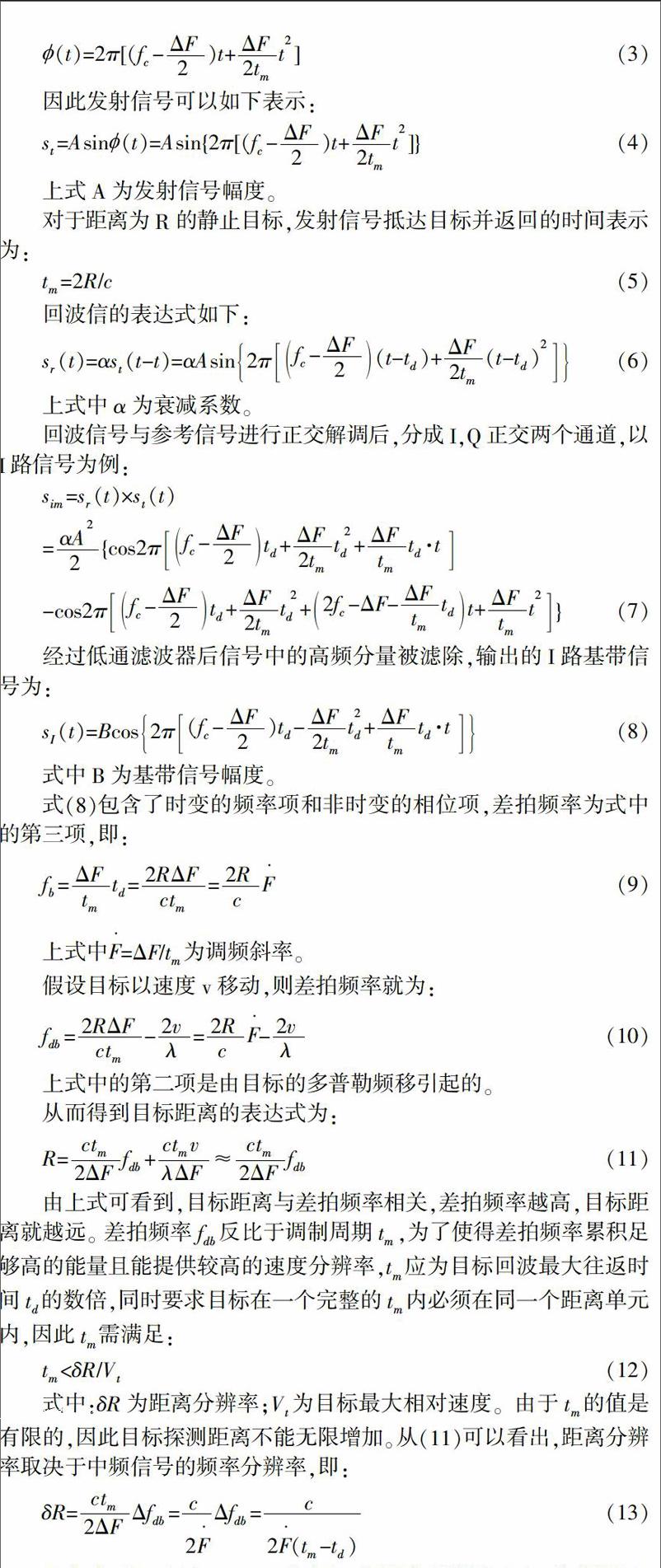
回波延迟和目标自身的运动会使雷达发射信号与回波信号之间存在有一定的频率差值。雷达发射机发出的线性调频信号,扫频时间Tm扫频宽度为△F,遇到目标后被反射,发射信号与反射信号的延迟时间为td。见图1。
从上式可知,相参FMCW雷达在不同的探测距离上有不同的距离分辨率。探测距离越远,距离分辨率就越差。
2海杂波环境下的弱小目标检测
由于无人艇吨位小,在海上起伏较大,一般雷达很难稳定的检测和跟踪目标,同时海浪的起伏也导致目标起伏和闪烁。俯仰方向采用较大度数的波束,可以抵消雷达因为无人艇起伏造成的目标断续,当无人艇向上摇摆时,不至于使得雷达波束打不到海面。同时因为无人艇雷达架高较矮,海浪等造成的海杂波及海尖峰影响会比较严重,这会造成较高的虚警概率,影响雷达探测和导航。
由于无人艇较小,雷达架高较低,船体的摇摆与浮沉会造成雷达目标的闪烁与断续。因此采用检测前跟踪算法(TBD)来对目标进行检测和跟踪。
检测前跟踪算法中有一类是基于动态规划来做的,动态规划方法把目标可能经历的所有轨迹的观测值累积起来,当累积观测数据超过设定门限时认为目标存在,同时给出跟踪轨迹。这等价于在目标可能经历的轨迹上进行详尽的搜索,最后通过门限检测选择最接近真实轨迹的估计,并把它们作为目标真实轨迹的估计。该算法基于这样的假设:较大的累积观测值来自真实轨迹的可能性更大。基于动态规划的检测前跟踪实质就是在目标状态变化率恒定或较小的情况下,预先计算出目标可能经历的所有轨迹,并把这些轨迹存储起来。然后沿着这些轨迹累积观测数据,并假设超过门限的累积观测值对应的轨迹为目标的真实轨迹。
从图2中可以看出目标的航迹(红色)被检测出来,同时下方蓝色的航迹为强杂波的航迹,所以在此时目标与杂波同时被检测到,但是如果不知道目标的大概距离的话将无法区分两者。经过多次仿真试验发现,如果目标与杂波在相同的距离单元,或者距离很近,同时目标的强度低于海杂波的强度,这时使用动态规划的方法将不能有效区别目标与杂波。
雷达的信号经过TBD处理之后将大大消除杂波的影响,对海面目标能够进行可靠的探测,提高了检测概率,降低虚警概率。
3结论
文中根据无人艇在海面行驶的特点,设计了一种无人艇载的导航雷达,采用了FMCW信号,并采用了TBD的数据处理算法,能够有效的抑制海杂波,提高雷达对海面目标的检测概率。
[责任编辑:杨玉洁]
