
一种简化的线结构光视觉传感器现场标定方法
2017-05-23 18:29陈丽梁晓琳杨亚磊王国斌
中小企业管理与科技·上旬刊 2017年5期
陈丽+梁晓琳+杨亚磊+王国斌

【摘 要】用线结构光视觉传感器进行物体轮廓测量在非接触测量中变得越来越重要。其中,线结构光视觉传感器的标定是线结构光視觉测量的关键。论文根据现有的标定方法,提出了一种基于方框形圆点靶标的标定方法,并给出了数学模型。经过实验其精度满足普通测量要求。
【Abstract】 The contour measurement by using the light visual sensor in line structure is becoming more and more important in non-contact measurement. The calibration of line structure optical vision sensor is the key of line structure optical visual measurement. Based on the existing calibration method, this paper presents a calibration method based on the block shaped dot target, and gives a mathematical model. The accuracy of the experiment is met with ordinary measurement.
【关键词】线结构光;视觉传感器 ;现场标定方法
【Keywords】 line structured light; vision sensor; field calibration method
【中图分类号】TP391.41 【文献标志码】A 【文章编号】1673-1069(2017)05-0163-02
1 研究现状
目前,针对线结构光的视觉测量模型,提出了许多线结构光传感器的标定方法。主要有Dewar R提出的拉丝标定法[1],段发阶等提出了锯齿靶法[2-3],Huynh、徐光祐和魏振忠分别提出了利用交比不变性原理获取光平面标定点的标定方法。周富强、张广军等人提出了基于平面参照物的标定方法,简化了标定设备,适合现场标定,但每次标定时需多次改变激光光条与平面标定参照物的位置,增加了标定的复杂度。后来,周富强和魏振忠等先后提出了利用一维靶标上距离已知的特征点之间的距离约束,实现线结构光视觉传感器的结构参数标定的新方法,但标定点获取的个数和精度受到限制。
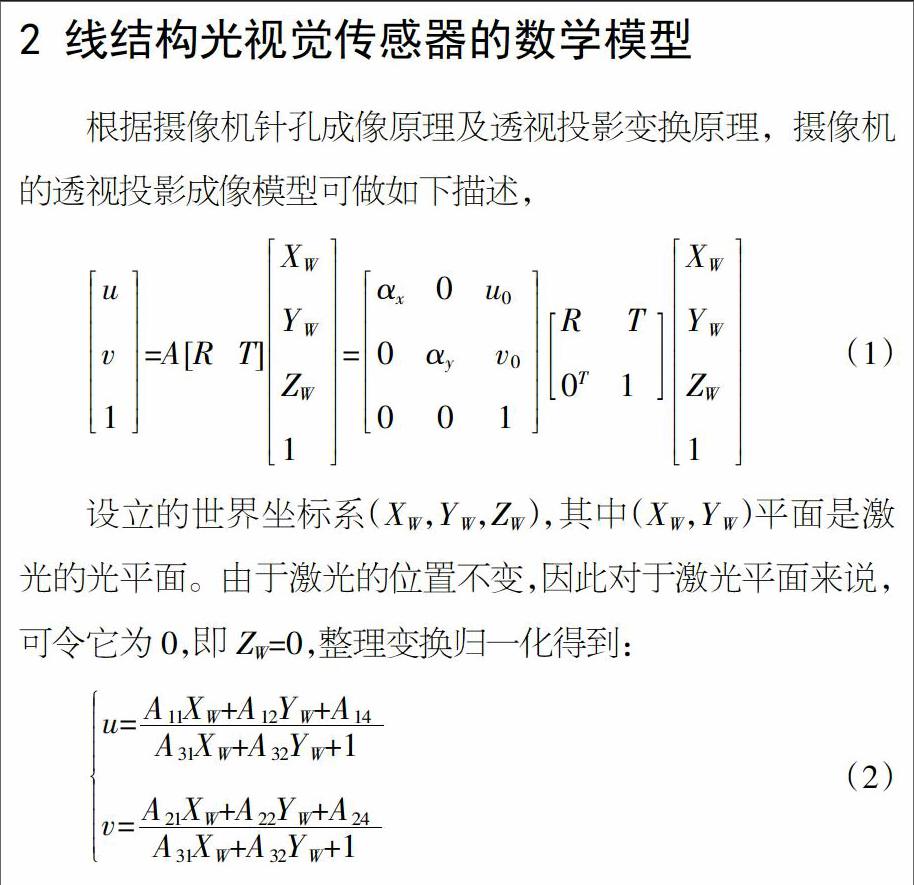
2 线结构光视觉传感器的数学模型
3 线结构光视觉传感器的标定
3.1 标定靶标的设计
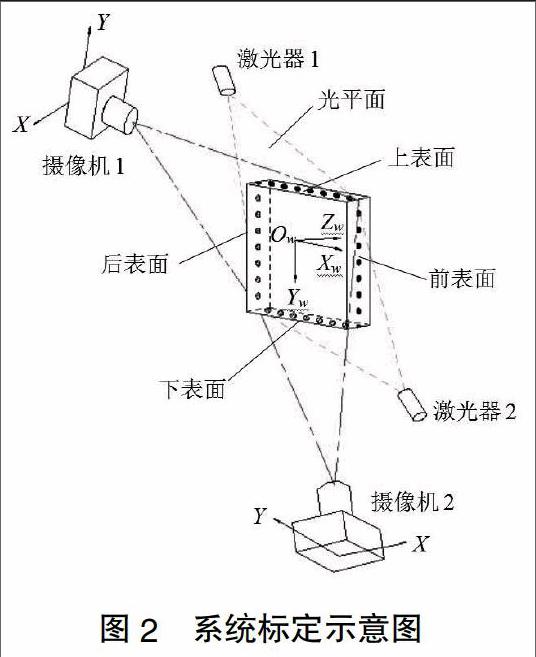
根据线结构光视觉传感器的数学模型可知有8个未知系统参数,需要至少4个非共线对应点。由此,设计了方框型圆点靶标,用来获取标定时所需要的高精度的标定点。该靶标由相互垂直的四个刚性平面构成,四周光刻半径为4mm,相邻间距为20mm的标靶圆点,分别以中间靶标圆点的中心为定位点定位在靶标框的直角顶点处。调整靶标使激光光平面与靶标圆点中心所在平面一致,如图1所示。
3.2 系统参数的标定
按照图2所示系统结构安装调整摄像机1和摄像机2使靶标圆点能在其中成全像,并且由线结构光视觉传感器的数学模型可知,靶标圆点的图像坐标也不能在同一直线上。
4 试验
标定精度主要从单点的定位精度进行验证。用标定好的两台摄像机采集验证点的图像,并根据如图3所示,其中,实际坐标用“O”表示,测量坐标用“+”点表示,其对比误差在0.2mm以内。
5 结论
建立了基于线结构光视觉传感器测量轮廓截面积的数学模型,提出了一种基于方框形共线圆点靶标的线结构光传感器系统参数的现场标定方法。该方法只需要调整标定靶标使其特征圆点的中心平面与线结构光平面在同一平面内,即可通过一次靶标图像采集,计算出线结构光视觉传感器的系统参数。目前,关于如何调整光平面使其与基准平面在同一平面内还没有简便有效的方法,可进一步研究来提高精度。
【参考文献】
【1】段发阶.一种新型线结构光传感器结构参数标定方法[J].仪器仪表学报,2000,21(l):105-110.
【2】魏振忠,张广军,徐园. 一种线结构光视觉传感器标定方法[J]. 机械工程学报,2005(02):210-214.
【3】周富强,张广军,江洁. 线结构光视觉传感器的现场标定方法[J]. 机械工程学报,2004(06):169-173.
