
探究鸭式布局模型飞机
2017-07-28 21:22祁浩宇刘赫
航空模型 2017年3期
祁浩宇 刘赫


在2016年全国“科研类”航空航天模型锦标赛上,笔者印象最深的是北京航空航天大学代表队使用新型复合材料制作的极限载重模型飞机。它勾起了笔者之前关于鸭式布局飞行器的一个突发奇想:如果飞行器的结构设计足够优秀,是不是能打破载重模型飞机在布局上的桎梏,制作一款鸭式布局载重飞行器?
为此,笔者根据鸭式布局飞行器的飞行原理和气动性能特点,通过比较鸭式布局与常规布局设计在各方面的优劣,确定了这款飞行器的设计方案。该试验的最终目标,是利用非常规布局增升减阻,让鸭式布局飞行器提供高于同规格常规布局飞行器的升力。
初步设计方案
在搜集资料的过程中,笔者重点了解了飞机的飞行原理以及非常规布局飞行器的性能特点。简单来说,飞机之所以能翱翔在天空,是因为流经机翼上下表面的气流速度有差异,导致上下表面出现了压力差,从而产生升力。
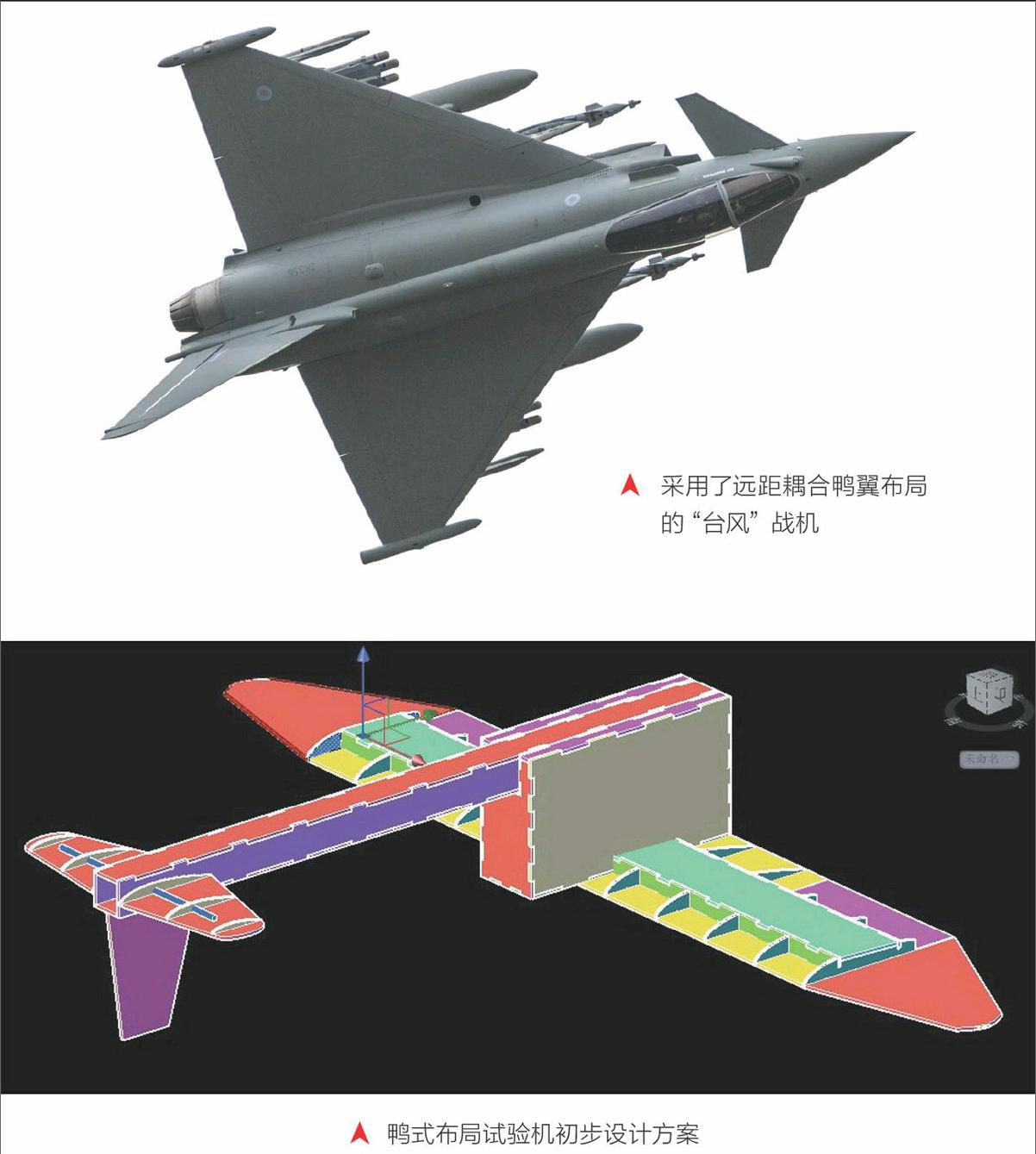
在方案设计阶段,航模队的前辈建议笔者采用远距耦合鸭翼无尾式布局。这里所说的远距耦合鸭翼布局,指的是鸭翼与主翼的距离超过了一个鸭翼的宽度。由于鸭翼离主翼距离较远,因此二者间在气动力上的干扰比较简单,各翼面参数的匹配相对容易。许多鸭式布局的现代战机都采用了远距耦合布局,如欧洲战机公司(英、德、意、西四国合作)的“台风”。
在远距耦合布局中,鸭翼不仅本身产生升力,其翼尖涡还会对流向主翼的空气产生一些有利的气动干扰。由于鸭翼和主翼都能提供向上的升力,因此全机升力作用点在重心之前,有抬头趋势。在设计时可通过增加主翼升力获得低头力矩的方法平衡,而这一举措会形成一个机翼弯度,有利于减小全机的配平阻力。简而言之,相比常规布局飞行器,采用远距耦合鸭式布局的飞行器升阻比更高。除此之外,远距耦合鸭式布局的鸭翼安装角通常大于主翼安装角。如此鸭翼会先于主翼失速,有利于防止全机陷入失速尾旋。
在初步设计方案中,试验机主翼采用了经典的Clark-Y翼型。这种翼型的横切面上弯下平,最大翼弦位置在20%弦长处。模型飞机的整体布局是鸭翼在前、主翼在后。为了增加升力,鸭翼的水平位置高于主翼。
模型制作过程
首先制作机身和主翼,材料为KT板。用KT板制作航模价格低廉、易修复,常被用于验证机。
制作时,先将设计好的模型飞机CAD三维图转换成二维平面图,然后将其导入激光雕刻机,得到机身和主翼的零部件。接着按照模型飞机三视图,将机身和主翼分别组装好,粘合剂为热熔胶。这种胶价格低廉,在五金店就能买到,适合用于泡沫和泡沫间,或者泡沫和木材间的粘合。
由于KT板的强度有限,因此在主翼前缘三分之一处须加1根直径2mm的碳杆,用于加强结构。主翼蒙皮采用吹塑纸。虽然吹塑纸比普通机翼蒙皮重,但是其简单牢固、强度大,且在试验过程中便于更换、造价低廉,是理想的验证机蒙皮材料。鸭翼的制作方法与主翼类似,在此不再赘述。
分别做好机身、主翼、鸭翼和连接用的水舱后,就可以进行模型飞机的组装了。之后需添加舵机、电调等电子设备。验证机使用的动力电机是朗宇2212电机,搭配8060塑料双叶桨。与常规布局飞行器相同,验证机的电机固定在机身前端,稍带右拉角。安装完起落架等组件,模型飞机就做好了。
第一轮验证飞行
在第一轮验证飞行中,验证机的问题出现在起飞过程。当模型飞机滑行到一定速度时,其迎角瞬间变大,同时机身剧烈倾斜,最终整架模型翻转并摔落在地面。该问题每次都会发生,导致验证机无法顺利升空。
在寻找问题原因的过程中,笔者发现模型飞机突然抬头是因为过重的配重块。这架验证机的配重块布置在主翼上方,且重量很大,造成模型飞机在地面加速过程中产生了一个较大的抬头力矩,还没起飞就翻折。
经过计算,笔者发现自己设计的鸭式布局飞行器推重比很小,翼载荷却极大,甚至高于常规布局飞行器。推重比直接影响模型飞机的性能:大推重比模型的加速性能好,可更快升空并达到最大飞行速度。翼载荷则影响了模型飞机的失速速度和爬升率。推重比过小,翼载荷又过大,二者的解决方法都是要给模型飞机减重。
为此,笔者在主翼后增加了一段机身,并在其上放置配重块,既保证了全机重心仍在主翼的水舱处,又减少了配重重量。最后全机起飞重量减小了约50g。
第二轮验证飞行
在第二轮验证飞行中,验证机的问题依然出现在起飞过程。模型飞机在滑跑中出现机身侧旋,导致起飞失败。具体情况是模型飞机还未加速到起飞速度就向右侧旋,加之操纵手不熟悉鸭式机的性能,模型很容易在这一瞬间失控。
笔者专门录了验证机的起飞视频。反复回放后,发现在滑跑过程中模型飞机向右侧旋有两个直接原因。一方面,模型飞机加速时,流经方向舵左右面上的气流导致其自动打舵,滑行方向偏移;另一方面,笔者在设计模型机头部分的拉力线时,仍然按照常規布局的思维,人为添加了一个向右的侧拉。由于在起飞滑跑时,模型飞机始终在距地面1米的高度范围内,因此在速度积累的过程中很容易产生右侧旋。除此之外,模型的前起落架设计得太高,造成全机左右摇摆,操纵手只能用方向舵不断修正。而这架验证机因转动惯量较大,容易在起飞时向左偏转,使得操纵手不得不用右舵修正。
虽然找到了直接原因,但是要根本解决问题,还是得从飞机设计的理论和经验入手。在前辈的点拨下,笔者认为该问题的根本原因是机翼面积过小、螺旋桨扭矩过大、发动机转速过高……尝试换了一个扭矩较小(桨叶面扭转较为平缓)的螺旋桨后,这个问题得到了很大改善。
其他问题和解决方法
通过增加一段机身和更换螺旋桨,模型飞机不仅大幅减重,而且起飞更平稳。改造后,已能平稳地滑跑起飞,并可在离地面两米的高度短暂飞行。不过这只是试验中前进的一小步,之后笔者对这种鸭式布局飞行器又做了不少设计上的改进。
1.机翼
在试验初期,模型飞机采用的是盒式机翼,主翼和水舱直接连接。后期笔者在主翼上加了一个平台,让其与水舱平行粘接,使水舱与主翼的连接更牢固,水舱位置也更准确。之后又在模型主翼上增加了两个翼刀作为安定面,减轻了模型飞机在整个飞行过程中的侧旋倾向。
2.机身
先是在水舱位置加了整流罩,降低了全机阻力。后因笔者怀疑是方向舵的粘连方式造成流经其左右的气流速度不同,从而方向舵自动打舵,使得模型飞机容易侧旋。故又加厚了方向舵,并确保其左右对称。
由于采用了远距耦合鸭翼布局,因此模型飞机的前起落架和主起落架的距离较远,且前起落架做得很高,方向性很差。解決方法是提高起落架的制作精度并加固前起落架。
在前两轮验证飞行中,模型飞机的机身全部都使用KT板制作。然而因为KT板强度低,所以导致模型机身频频折断。在之后的试验中,笔者改用KT板加木板制作,提高了机身强度。
3.配重和重心
在设计方案中,鸭式布局验证机的重心在机身中轴线上,靠近主翼。初期笔者尝试在主翼上放置配重块,却发现会影响主翼升力:于是将配重块转移到水舱下部紧贴主翼的地方,但配重量一度达到1.635kg,严重增加了全机起飞重量。后期,配重块被移到主翼后边,并利用加出来的一节机身(两根碳管)增大力矩、减轻配重量,效果显著。
4.控制和稳定
考虑到要在水舱上方快速装载水袋,垂直安定面装在了前起落架位置。这样一来,模型飞机的操纵性虽然得到增强,横向稳定性却降低了。在试验过程中,笔者给模型飞机增加了1个A3 Super陀螺仪,尝试用它的自稳功能来改善模型的稳定性。最后通过逐渐增大陀螺仪的感度和舵机行程,改善了模型飞机的飞行稳定性。增大了陀螺仪的感度和舵机行程后,还需给模型飞机提供足够的升力、改善飞行姿态,因此对鸭翼也做了多次更改,加大了升力面。
鸭式布局飞行器是笔者的一次飞行器设计探究性试验。之前做的大量前期设计和方案,大部分都用到了验证机上。在试验过程中,验证机坠毁了很多次,但每一次失败都成为下一架模型飞机的改善依据。从最初的无法起飞,到最后能离地飞行一段,验证机有了众多版本和改进型,制作工艺也一直在提高。
通过这次探究性试验,笔者逐一验证了许多设计方案,积累了鸭式布局飞行器的制作和飞行经验,如采用鸭翼在前、主翼在后,鸭翼的水平位置高于主翼且安装角大于主翼的设计方案。这种远距耦合鸭翼布局飞行器能获得比常规布局飞行器更大的升力。
目前这款鸭式布局验证机仍存在一些问题:模型飞机起飞迎角过大的问题尚未得到彻底解决,还是容易向后翻折;操控难度较大,模型易失控;平飞时会有一段波状飞行状态,说明全机配平还需微调;在有风环境中方向舵仍会受到影响,导致模型飞机的飞行方向出现偏差;陀螺仪不太适合鸭式布局飞行器等。这些问题都有待笔者和模友们共同解决。
猜你喜欢
科学Fans(2019年4期)2019-04-30
环球时报(2018-11-30)2018-11-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
航空模型(2016年12期)2017-04-18
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
航空模型(2016年3期)2016-05-14
航空模型(2016年3期)2016-05-14
小朋友·快乐手工(2015年5期)2015-06-06
