基于超扭曲算法的永磁同步电机直接转矩控制
2017-08-31 19:02宋争光夏长亮王志强史婷娜
电工技术学报 2017年15期
宋争光 夏长亮 王志强 史婷娜
(1.天津大学电气与自动化工程学院 天津 300072 2.天津市电工电能新技术重点实验室(天津工业大学) 天津 300387)
基于超扭曲算法的永磁同步电机直接转矩控制
宋争光1夏长亮1王志强2史婷娜1
(1.天津大学电气与自动化工程学院 天津 300072 2.天津市电工电能新技术重点实验室(天津工业大学) 天津 300387)
针对以电压源逆变器(VSI)馈电的永磁同步电机(PMSM)驱动系统,提出一种基于超扭曲算法的直接转矩控制。该控制策略结合滑模控制、直接转矩控制和空间矢量调制的原理,克服了PI型控制的空间矢量调制-直接转矩控制(DTC-SVM)鲁棒性差与传统滑模控制的DTC-SVM存在抖振的缺点,从而获得良好的稳态与动态性能,同时保证逆变器开关频率近似恒定。实验结果表明,所提方法不仅可以有效减小磁链和转矩脉动,还对系统参数变化具有较强的鲁棒性能。
永磁同步电机 空间矢量调制 直接转矩控制 超扭曲算法
0 引言
直接转矩控制(Direct Torque Control,DTC)因其结构简单、动态响应快、鲁棒性强等优点,被广泛应用于高性能交流驱动系统[1],尤其是电压型逆变器(Voltage Source Inverter,VSI)馈电的永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)驱动系统[2]。在传统DTC中,两个滞环比较器仅能产生4种数字控制量的组合,且当定子磁链位于任意扇区时,每种组合仅在开关表中唯一地对应一个有效矢量,并且每个有效矢量的长度相等,且方向固定,因此传统DTC对输出矢量的控制能力会受到严重限制,这会使其在稳态运行时出现不理想的转矩与磁链波动[3]。同时,滞环比较器在固定的采样周期内无法控制开关导通时间,即无法控制开关电压矢量作用时间,导致逆变器开关频率不恒定[4]。
近年来多种DTC的改进方案相继被提出。利用电压空间矢量调制(Space Vector Modulation,SVM)技术可获得更多连续变化的电压空间矢量,实现对磁链、 转矩更准确地控制,同时保证逆变器开关频率近似恒定[5]。文献[6]利用PI控制器将转矩控制误差转换为转矩角的增量,结合定子磁链矢量偏差重构定子参考电压矢量,建立了转矩闭环直接转矩控制。文献[7]分别以转矩和磁链误差作为输入,由两个PI控制器输出定子参考电压,并采用空间矢量调制控制逆变器的开关状态。虽然采用PI型调节器替代滞环型调节器来控制定子磁链和转矩可以获得良好的稳态性能,但特定的PI系数对电机参数、转速和负载变化敏感,不能保证控制鲁棒性[8]。
滑模变结构控制对非线性不确定性系统来说是一种有效的控制方法,其对系统的参数摄动和外部干扰鲁棒性非常强,且结构简单,响应快速[9,10]。文献[11,12]在永磁同步电机两相静止坐标系中,将定子磁链和转矩两个滞环控制器用滑模变结构控制器来代替,再结合空间矢量调制方法,以减小磁链和转矩脉动。但滑模控制的抖振现象是限制该方法取得更好控制效果的一大障碍。为减弱或消除抖振的影响,Aire Levant 首先提出高阶滑模控制思想[13],并系统地提出了几种二阶滑模(Second Order Sliding Mode,SOSM)控制算法,常见的二阶滑模控制算法有twisting算法、prescribed convergence law算法、sub-optimal算法和super twisting算法,其中super twisting(超扭曲)算法已被用于无人机编队飞行控制系统[14]。高阶滑模保留了传统滑模的优点,并且能有效抑制抖振。与传统滑模作用到滑模变量的一阶导数上不同,高阶滑模的主要思想是将产生抖振的开关函数作用到所选取滑模变量的高阶导数上,并通过控制率的设计使得滑模变结构在有限时间内快速收敛[15,16]。高阶滑模算法的实现通常需要滑模变量的导数,而基于超扭曲算法的滑模作为一种高阶滑模算法,本质是二阶滑模算法,它的实现并不需要滑模变量的导数,从而简化了控制器结构[17,18]。
本文在定子磁链定向坐标系下设计了基于超扭曲算法的直接转矩控制。该方法克服了PI型控制的DTC-SVM鲁棒性差与传统滑模控制的DTC-SVM存在抖振的缺点,可以有效减小磁链和转矩脉动,同时保证逆变器开关频率近似恒定。
1 永磁同步电机数学模型
表贴式永磁同步电机在定子磁链坐标系x-y下的数学模型[3]为
(1)
其中
(2)
式中,ux、uy分别为电机定子电压在x、y坐标下的分量;ix、iy分别为电机定子电流在x、y坐标下的分量;Te为电磁转矩;Ls为电机定子电感;Ψs为定子磁链矢量;Ψf为转子永磁体磁链幅值;p为电机极对数;δ为定子磁链与转子磁链的夹角,δ∈(-π/2,π/2);ωr为转子永磁体磁链旋转角速度。
由式(1)分析可知,在定子磁链定向坐标系下,ux与磁链幅值的变化率呈正相关,uy与转矩的变化率呈正相关。
2 基于超扭曲算法的直接转矩控制
2.1 基于超扭曲算法的控制器设计
超扭曲算法的一般形式为
(3)
式中,x1、x2为状态变量;λ、α为正的常数;ρ1、ρ2为扰动。相比于传统一阶滑模状态变量x1收敛偏差正比于τ(τ为采样时间[19])。超扭曲算法在离散域状态变量x1收敛偏差正比于τ2,具有更准确的跟踪性能。
采用超扭曲算法设计转矩和磁链控制器时,滑模切换函数取为
(4)

设计的转矩和磁链控制器为
(5)
式中,k1、k2、k3、k4为控制器增益,均为正的常数。
由于式(5)表示的控制量是连续函数,故可有效抑制抖振。
将切换函数对时间求导,可得
(6)
令k11=kk3,k22=kk4,为证明上述系统稳定性,选取李雅普诺夫函数为
(7)
其中
由于
对式(7)求导,可得
(8)
其中

(9)
其中
若选取控制器参数
(10)

由式(10)选取合适的参数后,要想获取k3、k4,还需要求得k值。由于[2]
(11)
将式(11)对δ求导,并联立式(2),可得
(12)
内蒙古额仁高比一带发育大量的早白垩世白音高老组的火山岩,分析地区白音高老组火山岩岩石地球化学特征,对揭示该时期岩浆作用具有重要地质意义。通过1∶5万区域地质调查工作,探讨其成因以及形成的大地构造环境。
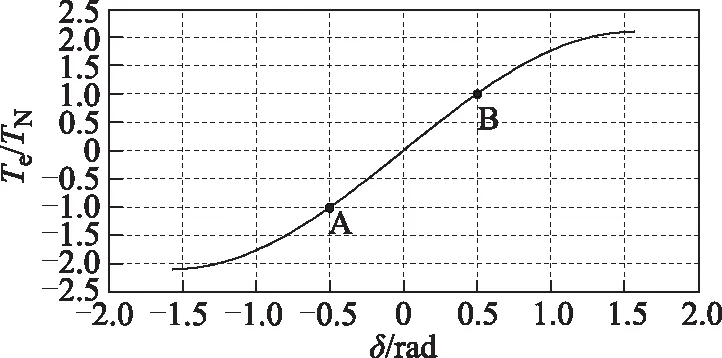
图1 Te与δ关系曲线Fig.1 Relationship curve of Te and δ
2.2 鲁棒性分析
系统实际运行时会受到内部参数摄动、外部干扰、测量误差以及测量噪声等影响,考虑干扰的系统方程可表示为
(13)
式中,d1、d2为各种扰动之和。
将式(5)代入式(13),可得

2.3 定子磁链与转矩估计
永磁同步电机系统在定子磁链估计时,由于电压模型相比于电流模型需要较少的电机参数,且结构简单,通常采用电压模型。
(14)
(15)
(16)


整个定子磁链估计的原理框图如图2所示。
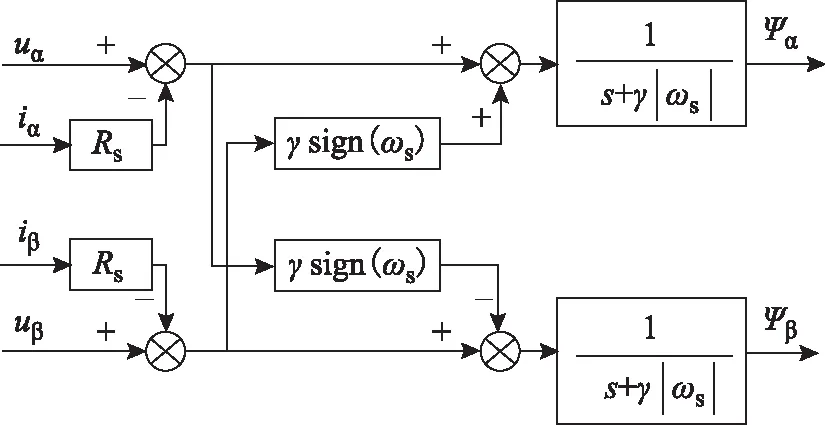
图2 定子磁链估计框图Fig.2 Diagram of the stator flux estimator
2.4 基于超扭曲算法的直接转矩控制系统
本文所提出的基于超扭曲算法的直接转矩控制框图如图3a所示,图3b给出了超扭曲控制器框图,该控制策略结合滑模控制、直接转矩控制和空间矢量调制的原理,可以实现对转矩和磁链的简单有效控制。
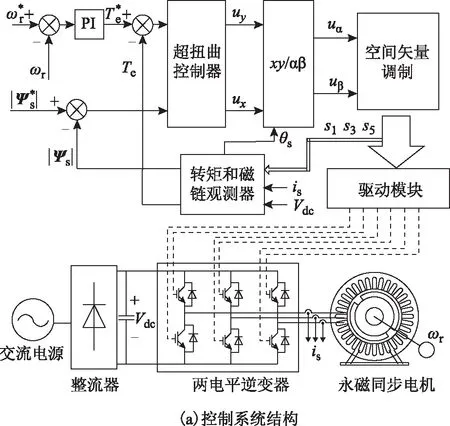
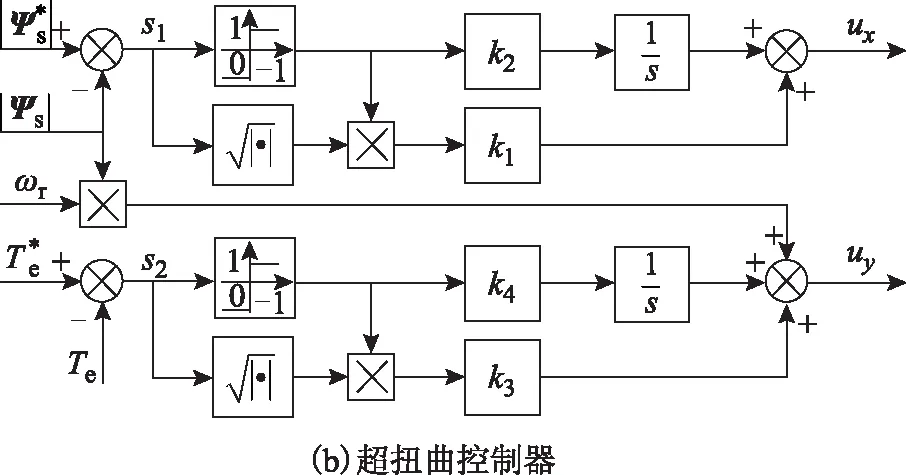
图3 基于超扭曲算法的直接转矩控制系统及控制器框图Fig.3 Diagram of direct torque control using super twisting algorithm and controller
3 仿真和实验分析
3.1 仿真结果分析
为了验证本文提出方法的有效性,利用Matlab/Simulink 建立仿真模型,仿真中的电机参数见表1。为了更好地与实验条件相一致,速度控制器输出设有限幅环节,限幅为[-500,500]。
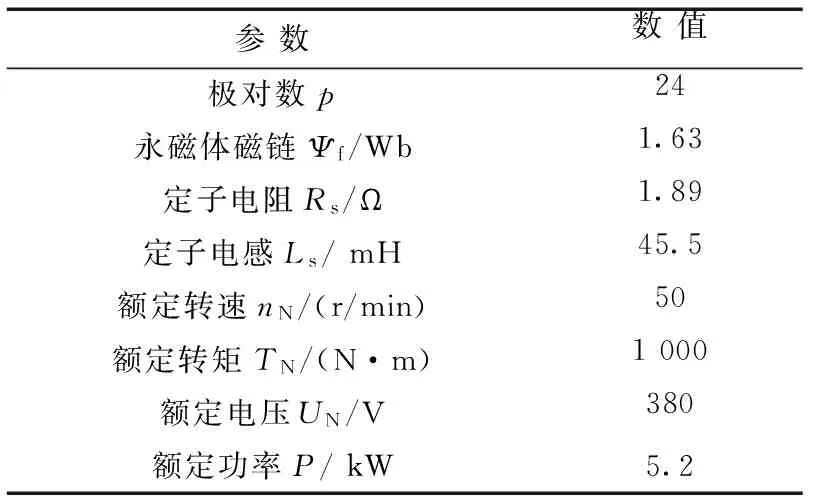
表1 永磁同步电机额定参数Tab.1 Rated parameters of PMSM
首先在没有转速控制器的条件下对本文算法的转矩和磁链跟踪性能进行仿真验证,图4给出了其跟踪波形。可以看出,本文算法的转矩与磁链可以快速准确地跟踪其参考信号,同时不存在超调现象,因此本文算法具有良好的转矩与磁链跟踪性能。

图4 本文所提方法的转矩和磁链跟踪波形Fig.4 Tracking waveforms of torque and flux for the proposed approach
下面将本文控制算法与PI控制器[7]和指数趋近律的滑模控制器[12]进行比较,三种控制方法的速度控制器均为PI控制器。图5给出了三种方法在电机转速为25 r/min,负载转矩为300 N·m时的稳态波形。可以看出,本文方法在稳态运行时具有良好的转矩、磁链和电流波形,与PI控制大体相当,而指数趋近律控制下的转矩、磁链和电流因其控制器中含有不连续开关量,故具有较大的波动。
图6给出了电机转速为25 r/min,负载从200 N·m阶跃到400 N·m时,三种方法的动态波形。可以看出,三种方法在负载发生突变时,都能迅速跟踪转速和转矩指令值。PI控制下定子磁链幅值易受到负载突变的影响,这是由其带宽较小造成的,若增大其带宽,虽然可以减小定子磁链幅值受负载突变的影响,但其对外界噪声干扰抑制减弱,从而使得定子磁链幅值波动变大。而指数趋近律控制与本文所提方法控制下磁链控制器的带宽较大,并且指数趋近律控制与本文所提方法控制均属于滑模控制,滑模控制结构对外界噪声干扰不敏感,故其定子磁链幅值不受转矩变化的影响,具有较好的控制鲁棒性。
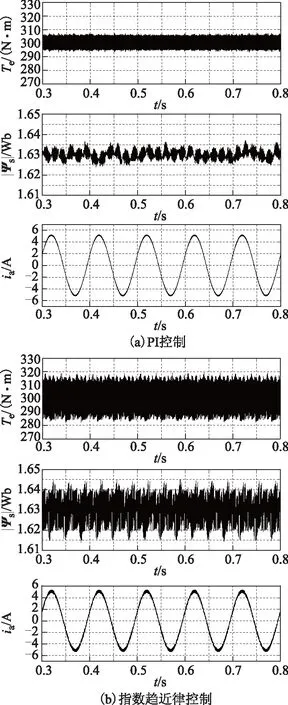

图5 三种控制方法的稳态波形Fig.5 Steady state waveform of three control methods
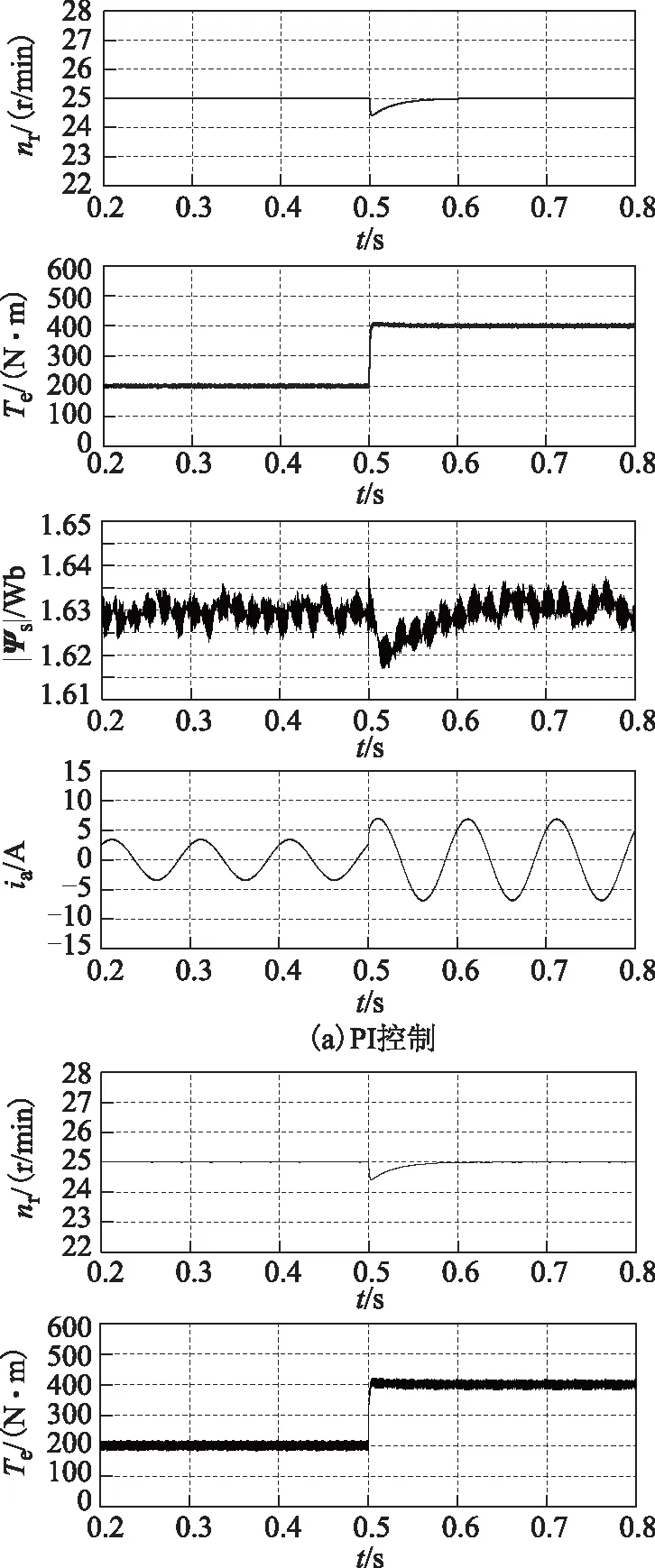
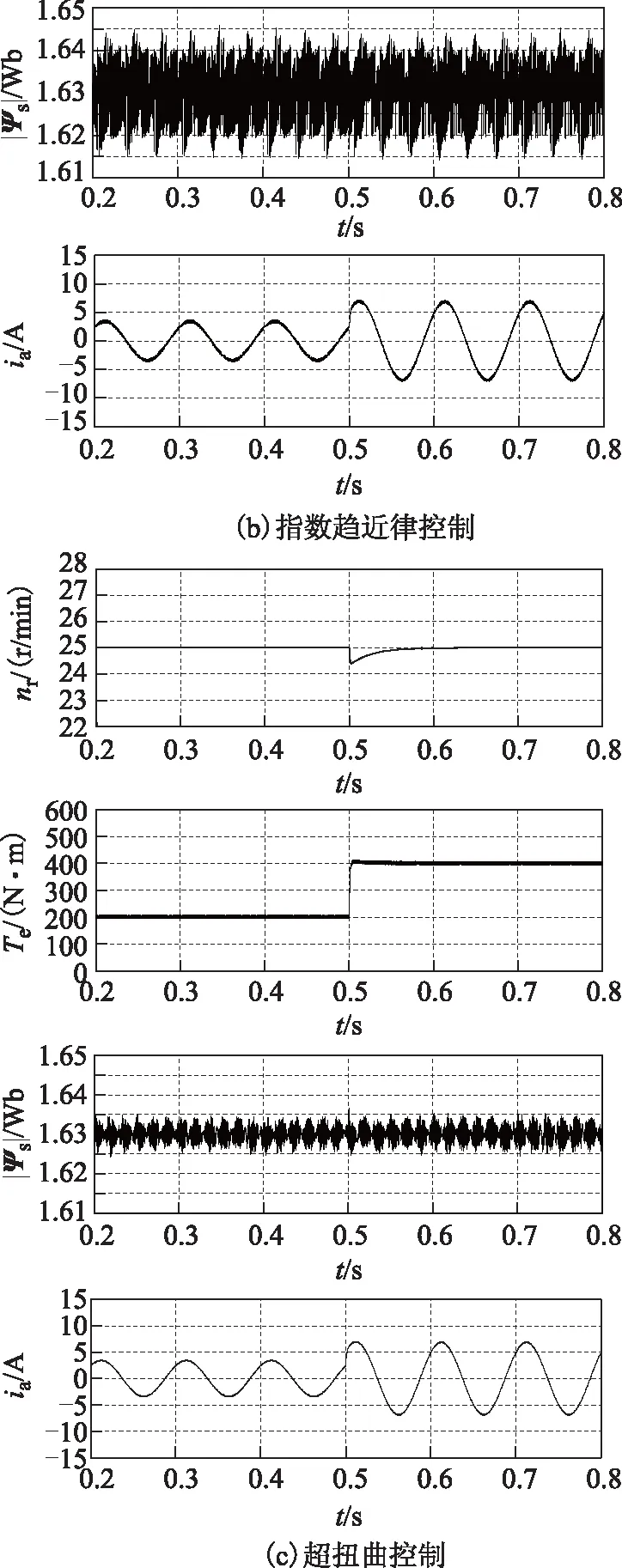
图6 三种控制方法的动态波形Fig.6 Dynamic waveforms of three control methods
由于观测定子磁链时用到了定子电阻Rs,下面将给出Rs变化对本文算法的仿真结果。设定子电阻的模型参数为RsM。图7给出了本文算法在电机转速为25 r/min,负载转矩为300 N·m,Rs取不同值时的仿真波形。可以看出,Rs变化不会影响本文算法的转矩与磁链的跟踪与稳态控制性能,这说明电阻偏差不会对本文算法的转矩与磁链控制性能造成影响,在磁链幅值跟踪上其参考值的情况下,定子电流会随Rs的增加而逐渐减小。
3.2 实验结果分析
为了验证本文所提控制算法的正确性,针对一表贴式永磁同步电机进行实际系统的实验验证。系统功率回路由不可控整流器与智能功率模块(Intelligent Power Module,IPM)相连,输出连接永磁同步电机。控制电路由浮点型TMS320F28335 DSP为主控芯片,以Cyclone系列FPGA作为辅助控制芯片。在实验中,k1=900,k2=1 500,k3=25,k4=1 000,γ=0.1,转速PI控制器Kp=800,Ti=0.14,系统采样周期为100 ms,开关频率为5 kHz,实验电机参数见表1。
为验证本文控制算法的转矩和磁链跟踪性能,首先在没有转速控制器的条件下对本文算法进行实验验证,图8给出了本文算法的转矩和磁链幅值跟踪波形。实验中,参考转矩为300~-300 N·m的方波信号,参考磁链为1.6~0.8 Wb的方波信号。可以看出,本文算法的转矩与磁链可以快速准确地跟踪其参考信号,同时不存在超调现象,因此本文算法具有良好的转矩与磁链跟踪性能。
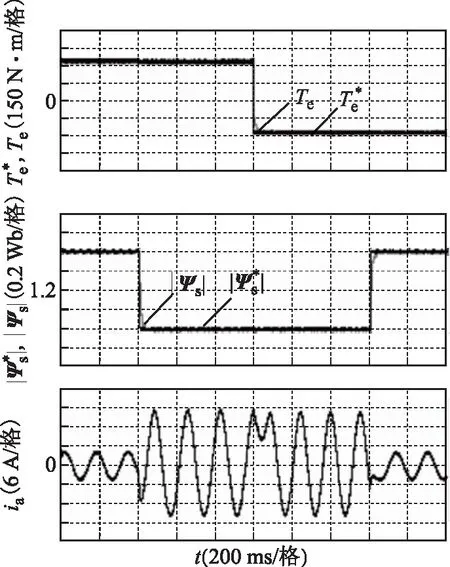
图8 本文所提方法的转矩和磁链跟踪实验波形Fig.8 Tracking experiment waveforms of torque and flux for the proposed approach
为验证本文控制算法的稳态与动态性能,分别将其与PI控制器[7]和指数趋近律的滑模控制器[12]进行比较,三种控制方法的速度控制器均为PI控制器,图9 给出了三种方法的稳态波形。实验中,电机转速nr为25 r/min,负载转矩TL为300 N·m。可以看出,本文方法在稳态运行时具有良好的转矩、磁链和电流波形,与PI控制大体相当,这是由于本文方法的控制器中控制函数是连续函数,有效削弱了一阶滑模固有的抖振现象,而指数趋近律控制下的转矩、磁链和电流因其控制器中含有不连续开关量,故具有较大的波动。

图9 nr=25 r/min,TL=300 N·m时的电磁转矩、定子磁链幅值和定子a相电流实验波形Fig.9 Experiment waveforms of electromagnetic torque,stator flux modulus and a-phase stator current with nr being 25 r/min,TL being 300 N·m
图10给出了电机在负载突变情况下,三种方法的转速、电磁转矩、定子磁链幅值和定子a相电流的实验波形。实验中,电机转速为25 r/min,负载转矩从200 N·m阶跃到400 N·m,定子磁链幅值参考值为1.63 Wb。由图10可以看出,在负载发生突变时,三种方法都能迅速地跟踪转速和转矩指令值。由于PI控制下磁链控制器的带宽较小,在负载发生突变时其磁链幅值易受到影响,不能保证控制鲁棒性,若增大其带宽,虽然可以减小磁链幅值受负载突变的影响,但其对外界噪声干扰抑制减弱,从而使得磁链幅值波动变大。而指数趋近律控制与本文所提方法控制下磁链控制器的带宽较大,且滑模控制结构对外界噪声干扰不敏感,磁链幅值不受转矩变化的影响,具有较好的控制鲁棒性。
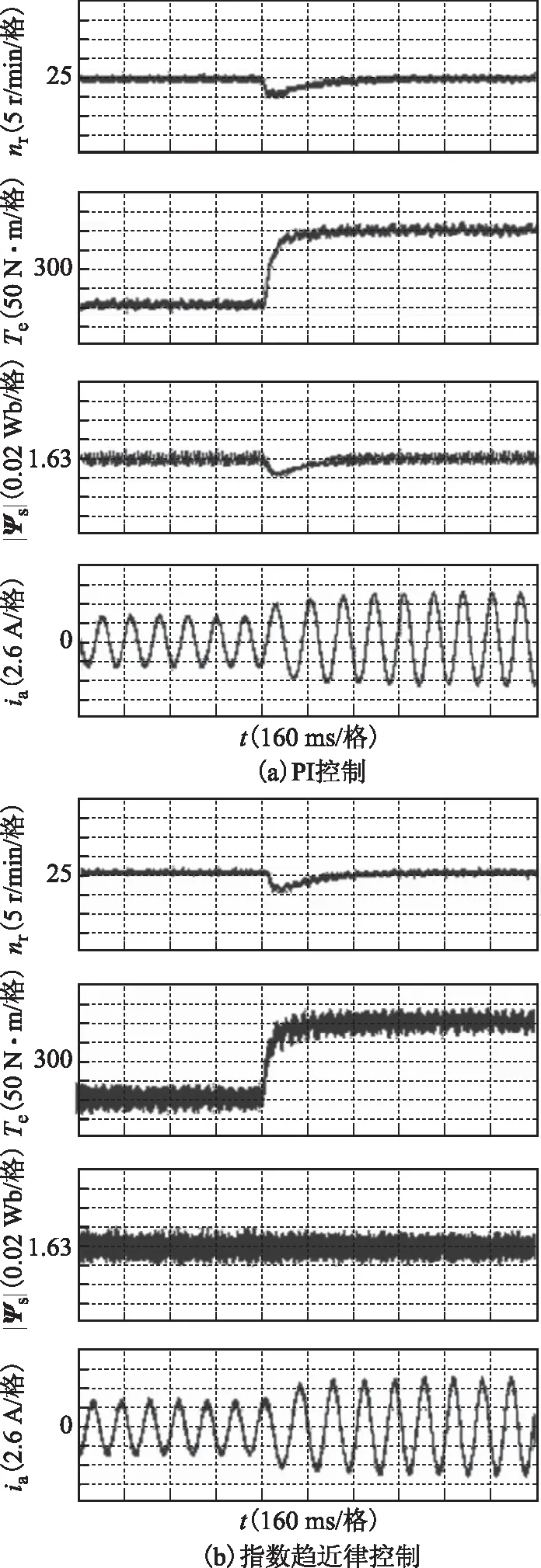
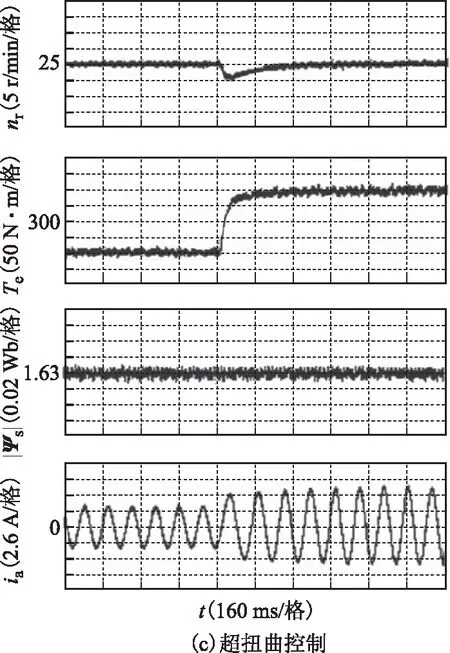
图10 nr=25 r/min,TL从200 N·m阶跃到400 N·m时的转速、电磁转矩、定子磁链幅值和定子a相电流实验波形Fig.10 Experiment waveforms of speed,electromagnetic torque,stator flux modulus and a-phase stator current with nr being 25 r/min,TL increasing from 200 N·m to 400 N·m
为验证本文算法的抗参数变化的能力,在观测定子磁链时用到了定子电阻Rs,下面将给出Rs变化对本文算法的实验结果。
设定子电阻的模型参数为Rs。图11分别给出了Rs取不同值时的电磁转矩、定子磁链幅值以及定子a相 电流的实验波形。实验中,电机转速为25 r/min,负载转矩TL为300 N·m,定子磁链幅值参考值为1.63 Wb。由图11可以看出,Rs变化不会影响本文算法转矩与磁链的跟踪与稳态控制性能,这说明电阻偏差不会对本文算法的转矩与磁链控制性能造成影响。在磁链幅值跟踪上其参考值的情况下,定子电流会随Rs的增加而逐渐减小。

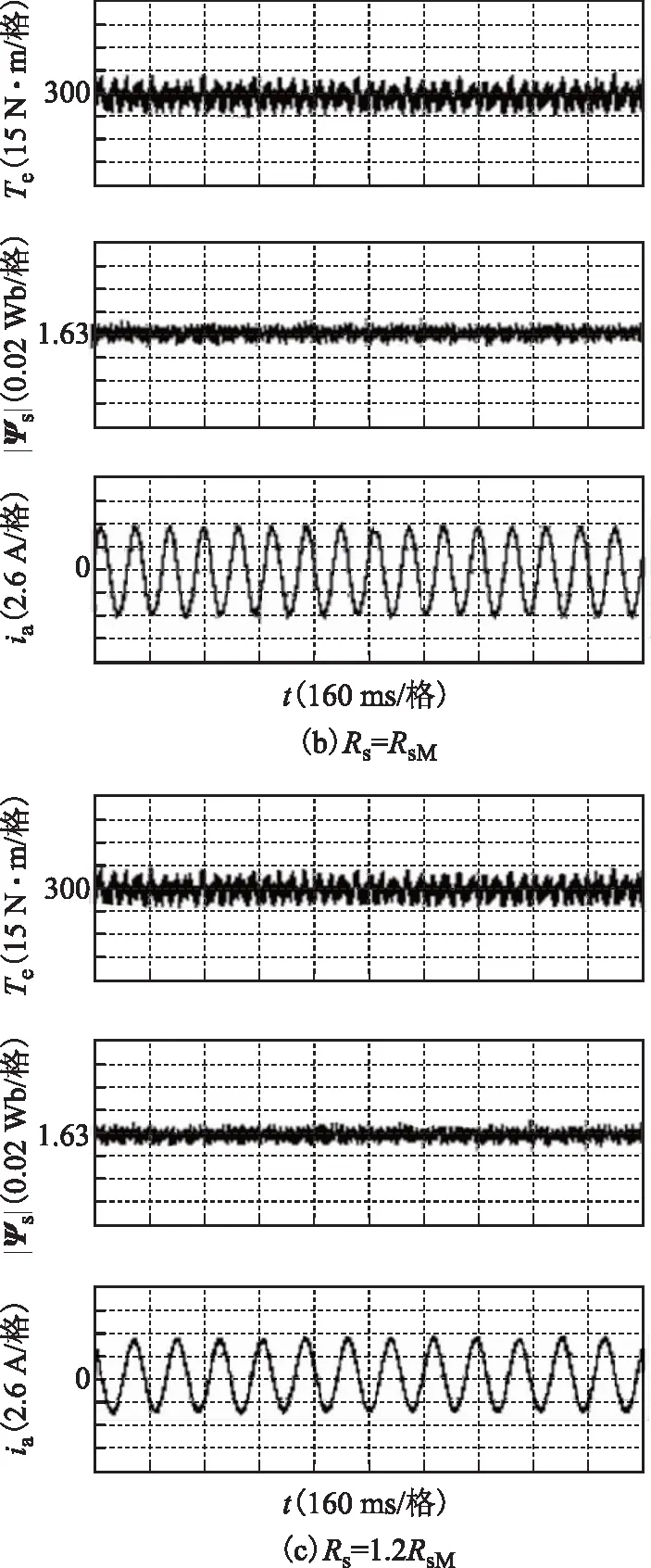
图11 本文所提方法在不同定子电阻下电磁转矩、定子磁链幅值和定子a相电流实验波形Fig.11 Experiment waveforms of electromagnetic torque,stator flux modulus and a-phase stator current with different stator resistance for the proposed approach
4 结论
为了克服PI控制DTC-SVM鲁棒性差与传统滑模DTC-SVM存在抖振的缺点,本文提出基于超扭曲算法的直接转矩控制。其中滑模控制与逆变器开关特性相结合可有效提高系统的动态特性,同时空间矢量调制可保证系统的稳态性能。实验结果表明,本文所提方法不仅可以有效减小磁链和转矩脉动,还对系统参数变化具有较强的鲁棒性能。
[1] 吕帅帅,林辉,马冬麒.基于最优占空比调制的永磁同步电机直接转矩控制[J].电工技术学报,2015,30(S1):35-42. Lü Shuaishuai,Lin Hui,Ma Dongqi.Direct torque control for permanent magnet synchronous motor with optimal duty cycle control[J].Transactions of China Electrotechnical Society,2015,30(S1):35-42.
[2] 陈炜,艾士超,谷鑫.基于最小电压矢量偏差的永磁同步电机直接转矩控制[J].电工技术学报,2015,30(14):116-121. Chen Wei,Ai Shichao,Gu Xin.Direct torque control for permanent magnet synchronous motor based on minimum vector deviation[J].Transactions of China Electrotechnical Society,2015,30(14):116-121.
[3] Xia Changliang,Wang Shuai,Wang Zhiqiang,et al.Direct torque control for VSI-PMSMs using four-dimensional switching table[J].IEEE Transactions on Power Electronics,2016,31(8):5774-5785.
[4] 刘英培,万健如,梁鹏飞.基于扩展卡尔曼滤波器和空间电压矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2009,29(27):67-74. Liu Yingpei,Wan Jianru,Liang Pengfei.Direct torque control for permanent magnet synchronous motor drive based on extended kalman filter and space vector modulation[J].Proceedings of the CSEE,2009,29(27):67-74.
[5] 邢岩,王旭,刘岩,等.基于空间矢量调制的永磁同步电机新型直接转矩控制策略[J].电气传动,2013(S1):6-10. Xing Yan,Wang Xu,Liu Yan,et al.New direct torque control method for PMSM based on space vector pulse width modulation[J].Electric Drive,2013(S1):6-10.
[6] Tang L,Zhong L,Rahman M F,et al.A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[7] Andreescu G D,Pitic C I,Blaabjerg F,et al.Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of IPMSM drives[J].IEEE Transactions on Energy Conversion,2008,23(2):393-402.
[8] Lascu C,Boldea I,Blaabjerg F,et al.Variable-structure direct torque control-a class of fast and robust controllers for induction machine drives[J].IEEE Transactions on Industrial Electronics,2004,51(4):785-792.
[9] 黄庆,黄守道,冯垚径,等.基于变结构自抗扰的永磁电动机速度控制系统[J].电工技术学报,2015,30(20):31-39. Huang Qing,Huang Shoudao,Feng Yaojing,et al.Variable structure based active-disturbance rejection controller for speed control system of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2015,30(20):31-39.
[10]陆婋泉,林鹤云,冯奕,等.永磁同步电机无传感器控制的软开关滑模观测器[J].电工技术学报,2015,30(2):106-113. Lu Xiaoquan,Lin Heyun,Feng Yi,et al.Soft switching sliding mode observer for PMSM sensorless control[J].Transactions of China Electrotechnical Society,2015,30(2):106-113.
[11]Xu Zhuang,Rahman M F.Direct torque and flux regulation of an IPM synchronous motor drive using variable structure control approach[J].IEEE Transactions on Power Electronics,2007,22(6):2487-2498.
[12]贾洪平,贺益康.永磁同步电机滑模变结构直接转矩控制[J].电工技术学报,2006,21(1):1-6. Jia Hongping,He Yikang.Variable structure sliding mode control for PMSM DTC[J].Transactions of China Electrotechnical Society,2006,21(1):1-6.
[13]Shtessel Y,Edwards C,Fridman L,et al.Sliding mode control and observation[M].New York:Springer New York,2014.
[14]杨婧,史小平.基于超扭曲算法的无人机动态逆编队控制器设计[J].系统工程与电子技术,2014,36(7):1380-1385. Yang Jing,Shi Xiaoping.NDI formation controller design for UAV based on super twisting algorithm[J].Systems Engineering and Electronics,2014,36(7):1380-1385.
[15]Levant A.Principles of 2-sliding mode design[J].Automatica,2007,43(4):576-586.
[16]黄进,赵力航,刘赫.基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用[J].电工技术学报,2013,28(11):54-61. Huang Jin,Zhao Lihang,Liu He.Sensorless control with resistance variation approach based on parallel MRAS and second-order sliding mode observer[J].Transactions of China Electrotechnical Society,2013,28(11):54-61.
[17]Chalanga A,Kamal S,Fridman L,et al.Implementation of super-twisting control:super-twisting and higher order sliding mode observer based approaches[J].IEEE Transactions on Industrial Electronics,2016,63(6):3677-3685.
[18]吴宇,皇甫宜耿,张琳,等.大扰动 Buck-Boost 变换器的鲁棒高阶滑模控制[J].中国电机工程学报,2015,35(7):1740-1748. Wu Yu,Huangfu Yigeng,Zhang Lin,et al.A robust high order sliding mode for Buck-Boost converters with large disturbances[J].Proceedings of the CSEE,2015,35(7):1740-1748.
[19]Davila J,Fridman L,Levant A.Second-order sliding-mode observer for mechanical systems[J].IEEE Transactions on Automatic Control,2005,50(11):1785-1789.
[20]Shin M H,Hyun D S,Cho S B,et al.An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors[J].IEEE Transactions on Power Electronics,2000,15(2):312-318.
(编辑 于玲玲)
Direct Torque Controlfor Permanent Magnet Synchronous Motor Using Super Twisting Algorithm
SongZhengguang1XiaChangliang1WangZhiqiang2ShiTingna1
(1.School of Electrical Engineering and Automation Tianjin University Tianjin 300072 China 2.Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy Tianjin Polytechnic University Tianjin 300387 China)
In this paper,a direct torque control using super twisting algorithm is proposed for voltage source inverter(VSI)-permanent magnet synchronous motor(PMSM)drive system.The principles of sliding mode control,direct torque control,and space vector modulation are combined to ensure high performance operation,both in the steady state and under transient conditions in this approach with approximately constant switching frequency.It solves the problems of poor robustness in direct torque control with space vector modulation(DTC-SVM)controlled by proportional plus integral controller and chattering in DTC-SVM controlled by slide mode controller.The experiment verified that the proposed method could decrease flux and torque ripples and be robust to parameter variation.
Permanent magnet synchronous motor,space vector modulation,direct torque control,super twisting algorithm
国家自然科学基金项目资助(51407127)。
2016-07-16 改稿日期2016-12-07
10.19595/j.cnki.1000-6753.tces.L70033
TM351
宋争光 男,1990年生,硕士研究生,研究方向为电机控制。
E-mail:szg1010430111@163.com
夏长亮 男,1968年生,教授,博士生导师,研究方向为电机系统及其控制。
E-mail:motor@tju.edu.cn(通信作者)
猜你喜欢
防爆电机(2020年6期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04