一种永磁同步电机失磁故障容错预测控制算法
2017-08-31 19:02张昌凡吴公平冯江华赵凯辉
电工技术学报 2017年15期
张昌凡 吴公平 何 静,2 冯江华 赵凯辉
(1.湖南工业大学电气与信息工程学院 株洲 412001 2.国防科技大学机电工程与自动化学院 长沙 410073 3.中车株洲电力机车研究所有限公司 株洲 412001)
一种永磁同步电机失磁故障容错预测控制算法
张昌凡1吴公平1何 静1,2冯江华3赵凯辉1
(1.湖南工业大学电气与信息工程学院 株洲 412001 2.国防科技大学机电工程与自动化学院 长沙 410073 3.中车株洲电力机车研究所有限公司 株洲 412001)
针对永磁同步电机失磁故障导致牵引系统带负载能力降低的问题,提出一种基于磁链在线检测容错预测控制算法。首先,根据永磁同步电机预测控制模型,详细分析了永磁体发生失磁故障对电流控制和电机运行状态的影响。其次,设计了基于滑模变结构的观测器,利用滑模变结构等值控制原理,建立了实时估计永磁体磁链算式。通过永磁体磁链算式,进而计算状态电流观测值。最后,提出了容错预测控制算法。该算法将状态电流观测值作为反馈量输入到容错预测控制器中,以使响应电流准确跟踪给定电流,从而达到容错控制的目的。通过仿真及实验验证,证明了所提算法的可行性和有效性。
永磁同步电机 电流预测控制 失磁故障 容错预测控制
0 引言
近年来,永磁同步电机得到了越来越广泛的应用,人们对永磁同步电机的控制性能也提出了更高的要求。矢量控制是交流电机高性能控制最常采用的方法,而电流闭环控制器是其关键部分之一。传统的电流控制器为PI控制器,它以简易性、鲁棒性等优点广泛应用于永磁交流电机驱动。但这类控制器存在积分饱和[1],并且是一个非线性、多输入的耦合系统[2],在高性能伺服系统中难以达到所需要的电流环动态性能。与传统的电流控制器相比,电流预测控制能够显著提高电机的动态性能,是永磁同步电机电流控制的最佳控制策略[3-5]。
电流预测控制是基于模型的控制方法,能够使永磁同步电机电流控制获得良好的动态和稳态响应。由于在控制器中需要准确地使用电机模型的参数,因此其控制的性能往往受制于电机模型的电感、磁链等参数的准确度[6]。而在工程实践中,永磁同步电机运行工况复杂,转子永磁体受到电磁、热、机械等应力会产生失磁故障[7,8]。永磁体失磁故障将会导致控制器电机模型参数与实际电机参数不一致,这将直接影响控制系统的性能,导致牵引系统效率降低、无法输出额定转矩以及无法工作在力矩控制模式等问题[9]。
为克服控制器电机模型参数误差对永磁同步电机控制性能的影响,文献[10-12]提出了一种改进的永磁同步电机电流环预测控制方法,该方法可以有效降低预测控制器对电感、电阻参数的依赖,但未考虑磁链参数对预测控制器的影响。文献[13]分析了控制器电机模型磁链参数不准的情况对电流控制的影响,并提出了解决算法。该文献认为永磁体磁链在运行过程中基本不会发生改变,但永磁体发生失磁故障时,永磁体磁链将发生改变。文献[14]采用级联的显式模型预测控制算法对永磁同步电机电流环进行控制,获得了较高的动态性能和对系统模型参数失配的鲁棒性。文献[15]通过参数在线辨识的方法获取被控对象的精确数学模型,消除参数不准确对预测控制效果的影响。但文献[14,15]所提方法只考虑了永磁同步电机的电阻和电感参数的变化,而忽略了永磁体发生失磁后磁链的变化。
为确保永磁同步电机高效可靠运行,本文提出了永磁同步电机的容错预测控制算法,实现了永磁同步电机在失磁故障的情况下稳定运行。首先,介绍了永磁同步电机正常运行时的电流预测控制原理;然后,分析了永磁体发生失磁故障对电流控制和电机运行状态的影响;最后,在失磁故障能够实时准确检测的前提下,提出了容错预测控制算法。
1 永磁体失磁分析
1.1 永磁同步电机电流预测控制
永磁同步电机在d-q同步旋转轴系下的电压方程为[16]
(1)
(2)
其中,磁链方程为
(3)
式中,ψd、ψq分别为定子磁链在d、q轴上的分量;ud、uq和id、iq分别为d、q轴电压和电流;ω为电角速度;ψro、R、Ld、Lq分别为永磁体磁链、定子电阻和d、q轴电感。
选择d、q轴电流构成系统状态变量,由式(1)、式(2)可得永磁同步电机在d-q坐标系下的状态方程为
(4)
y=Cx
(5)
其中
式中,x、u、y、fa分别为状态变量、系统输入、系统输出、永磁体磁链;A、B、C、D为状态方程系数矩阵。
设计预测控制系统时,当选择足够小的采样周期时,有[17]
式中,Ts为采样周期。
采用一阶欧拉法对式(4)进行离散化,可得永磁同步电机的离散状态空间函数为
i(k+1)=E(k)i(k)+Fu(k)+P(k)
(6)
其中
i(k)=[id(k)iq(k)]Tu(k)=[ud(k)uq(k)]T
采用预测控制算法对永磁同步电机进行控制,由式(6)得到预测控制器输出的电压矢量方程为[13]
u(k)=F-1[i*(k+1)-E(k)i(k)-P(k)]
(7)
永磁同步电机正常工作时,电流预测控制的结构框图如图1所示,其中ia、ib为定子电流。首先,将电流指令值i*(k+1)和当前电机的运行状态i(k)代入式(7),预测控制器将得到使响应电流矢量能够准确跟踪给定电流矢量所需的电压u(k);然后,运用SVPWM方法合成这一输出电压。
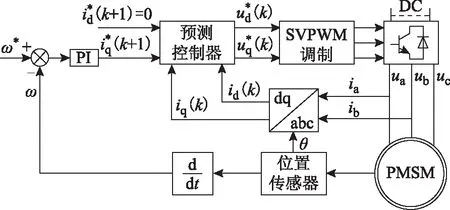
图1 电流预测控制结构框图Fig.1 Block diagram of predictive current control
1.2 失磁故障分析
模型预测控制是一种基于被控系统模型的新型控制算法,具有良好的控制性能,但对被控系统模型参数的敏感性较强。然而在复杂的运行工况中,当永磁体发生失磁故障时,会引起永磁同步电机系统模型中的磁链发生改变,这将导致控制器中磁链参数与实际电机磁链参数不一致。因此,如果采用正常情况的被控系统模型预测控制算法对故障电机进行控制,那么失磁故障将会严重影响控制系统的性能。下文将主要分析失磁故障对电流控制和电机运行状态的影响。
当永磁同步电机发生失磁故障时,永磁体磁链矢量幅值和方向将发生变化。电机永磁体磁链矢量由初始的ψro变化至ψr,电机磁场定向方向与永磁磁链方向存在偏差角γ,如图2所示。相应式(3)的磁链方程变为[18]
(8)
式中,Δψrd为永磁体磁链ψr在直轴上的变量,Δψrd=ψrcosγ-ψro,且Δψrd<0;Δψrq为永磁体磁链ψr在交轴上的变量,Δψrq=ψrsinγ,且Δψrq>0。

图2 永磁同步电机永磁体磁链的变化Fig.2 Variation of PMSM permanent magnet flux linkage
(9)

采用一阶欧拉法对式(9)进行离散化,可得故障情况下永磁同步电机的离散状态空间函数为

(10)
其中
假设永磁同步电机在kTs时刻正常运行,在(k+1)Ts时刻发生失磁故障。由于实际数字控制系统存在一拍延迟,当前kTs控制时刻计算得到的电压矢量通常需要等到下一个(k+1)Ts控制时刻再施加[19,20]。因此,控制器在kTs时刻首先根据当前电机正常的运行状态,计算出(k+1)Ts时刻需要作用的电压矢量,其过程可以用式(7)表示。在(k+1)Ts时刻,由kTs时刻计算得到的电压矢量作用于发生失磁故障的实际电机模型,产生新的响应电流矢量i(k+1),其过程可以用式(10)表示。

(11)
(12)
其中

定义有效磁链[21]为
ψext=ψro+(Ld-Lq)id
(13)
永磁同步电机的电磁转矩方程表示为[22]
(14)
永磁同步电机的运动方程表示为[23]
(15)
式中,np为电机极对数;Te为电磁转矩;ψs为永磁同步电机磁链空间矢量;ψext为有效磁链;is为定子电流空间矢量;TL为负载转矩;J为转动惯量。
由式(11)可知,失磁故障后存在电流偏差,即id≠0而为id=Δid>0,这将导致有效磁链ψext减小。如要维持式(14)成立,iq将增大,又由式(12)可知失磁故障后存在电流偏差,故iq将进一步增大。而考虑到永磁同步电机稳态运行时受逆变器输出能力的限制和过载保护的原因,定子电流幅值is不能超出极限值Ismax[24]。电机采用id=0的控制策略,即iq不能超出极限值,故电磁转矩将减小。电磁转矩减小后,由于电机给定负载不变,从式(15)可知电机将减速运行。
2 永磁同步电机失磁故障容错预测控制
2.1 失磁故障容错预测控制
由以上分析可知,永磁同步电机发生失磁故障时,响应电流矢量与给定电流矢量之间存在偏差。电流偏差会使有效磁链减小,定子电流增大,而考虑到定子电流受极限值的约束,即永磁同步电机带负载能力将下降,电机不能稳定运行。因此,需要提出有效的容错控制算法来消除电流偏差,从而降低有效磁链的减少量,使定子电流在极限值约束范围内维持电磁转矩方程平衡。
将故障情况下永磁同步电机的离散状态空间函数式(10)改写为
(16)
(17)
(18)
(19)
将式(18)、式(19)代入式(16)、式(17)得
(20)
(21)
选择d、q轴电流构成系统状态变量,可得故障情况下永磁同步电机的离散状态空间函数为

(22)
由式(22)得到故障情况下容错预测控制器输出的电压矢量为
(23)
容错预测控制算法的系统框图如图3所示。首先,由失磁故障检测部分检测永磁体的磁链变化,再由状态电流观测部分计算出状态电流观测值;然后,将当前电机的运行状态及状态电流观测值反馈到容错预测控制模块即式(23)中,以计算使响应电流准确跟踪给定电流所需作用的电压矢量u(k);最后,运用SVPWM方法合成这一输出电压矢量,从而消除电流偏差,使故障电机稳定运行。
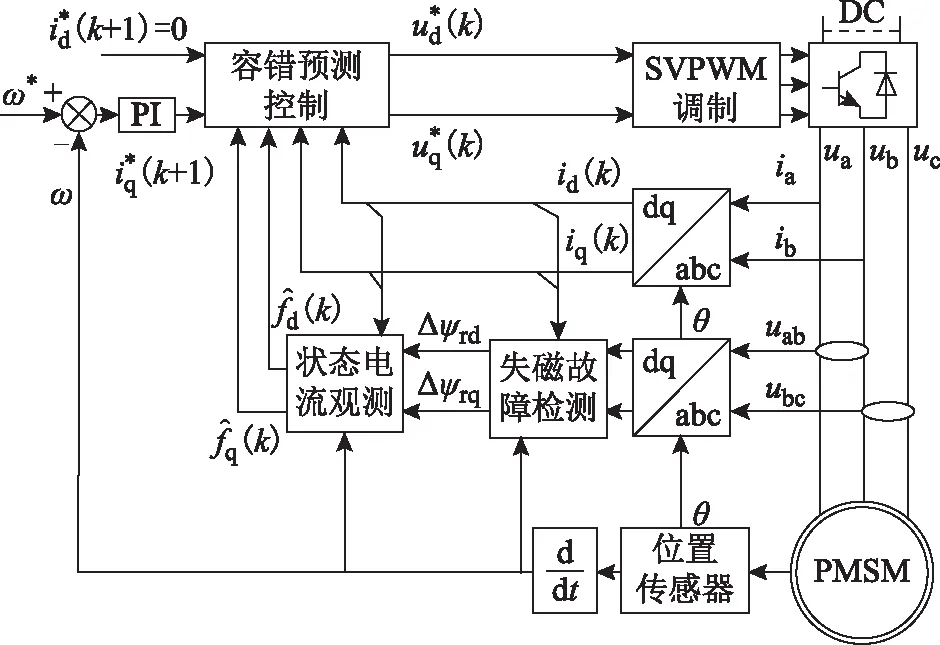
图3 容错预测控制算法系统框图Fig.3 Block diagram of fault-tolerant predictive control algorithm
2.2 失磁故障检测
对式(9)、式(5)所述系统设计如下滑模观测器,即

(24)

选取滑模面为
由式(9)、式(5)及式(24)可得观测器误差方程为
(25)
当选择适当的L和H时,则由式(25)确定的观测器误差方程将收敛到零。
观测器收敛性证明:
选取如下正定函数作为Lyapunov函数,即
(26)
对式(26)求导,并将式(25)代入得
(27)
其中

(28)
式中,k3=min{k1,k2}。

由Lyapunov稳定性理论可知:所设计的观测器 式(24)渐进稳定。
(29)


(30)
为减少滑模运动的抖动,采用连续函数取代符号函数,因此可得如下失磁故障重构算法,即
(31)
式中,δ1和δ2均为大于零的微小常数。
3 仿真结果与分析

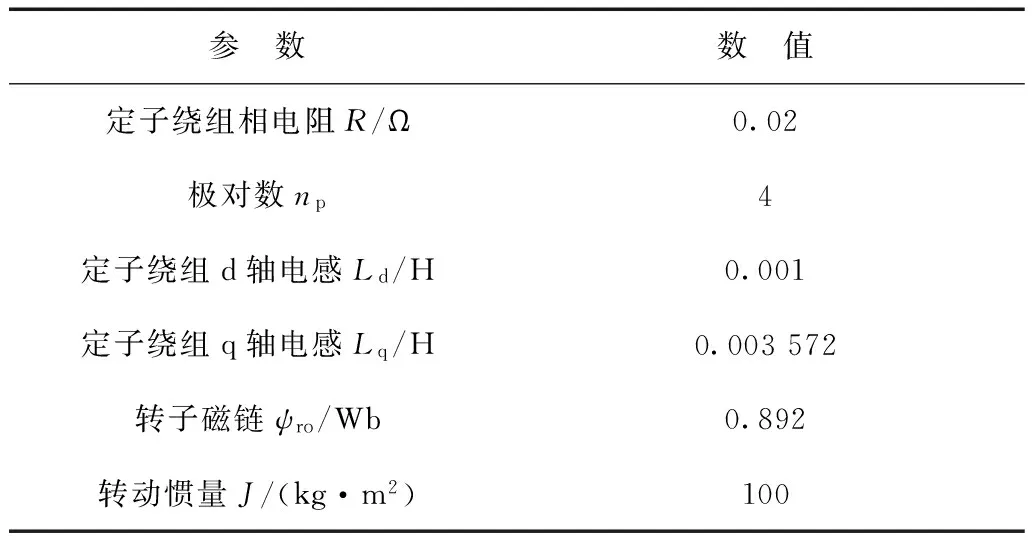
表1 电机参数Tab.1 The nominal value of the motor parameters
3.1 失磁故障对电机控制的影响
在永磁体发生失磁故障的情况下,采用正常情况的被控系统模型预测控制算法对故障电机进行控制时的仿真波形如图4~图7所示。
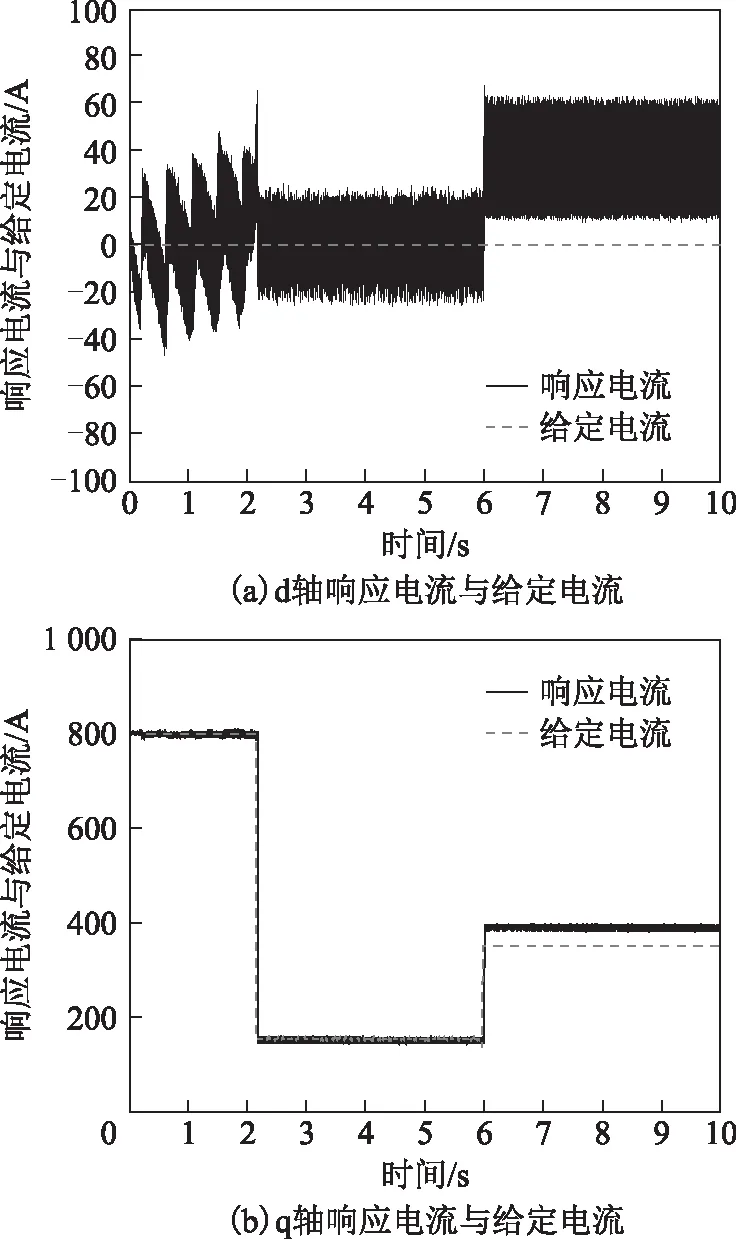
图4 电流响应仿真结果Fig.4 Simulation results of current response

图5 永磁同步电机磁链空间矢量仿真结果Fig.5 Simulation results of flux space vector of the PMSM

图6 定子电流空间矢量幅值仿真结果Fig.6 Simulation results of stator current space vector magnitude

图7 转矩和转速仿真结果Fig.7 Simulation results of torque and speed
由式(13)、式(14)计算电流偏差为Δid(k+1)=33.6 A, Δiq(k+1)=20.2 A。由图4可以看出,在6s时永磁体发生失磁故障后,d、q轴响应电流与给定电流之间存在偏差,且响应电流大于给定电流。由图5、图6可知,在6s时永磁体发生失磁故障后,由于电流偏差的存在,永磁同步电机磁链空间矢量幅值将减小,定子电流受到电流极限值的约束,导致故障电机带负载能力下降,电机减速运行,如图7所示。从仿真结果可以看出,仿真波形与理论分析相符。
3.2 容错预测控制
在永磁体发生失磁故障的情况下,采用容错预测控制算法对故障电机进行控制时的仿真波形如图8~图14所示。
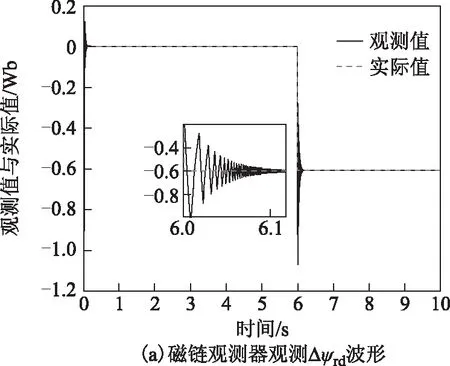
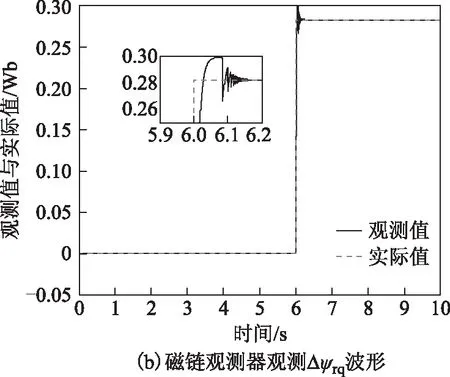
图8 磁链观测仿真结果Fig.8 Simulation results of flux observation
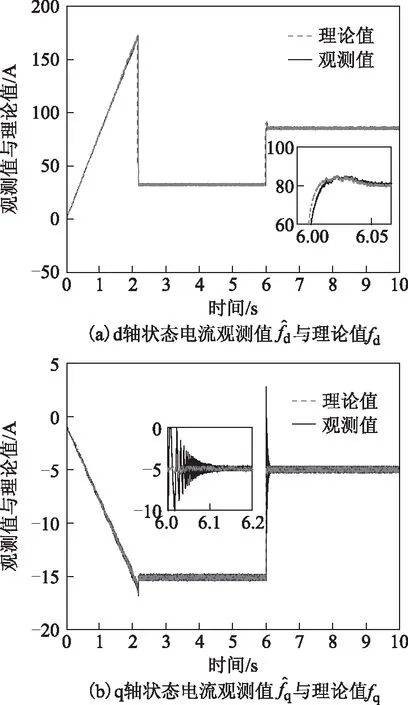
图9 状态电流观测值仿真结果Fig.9 Simulation results of state current observation
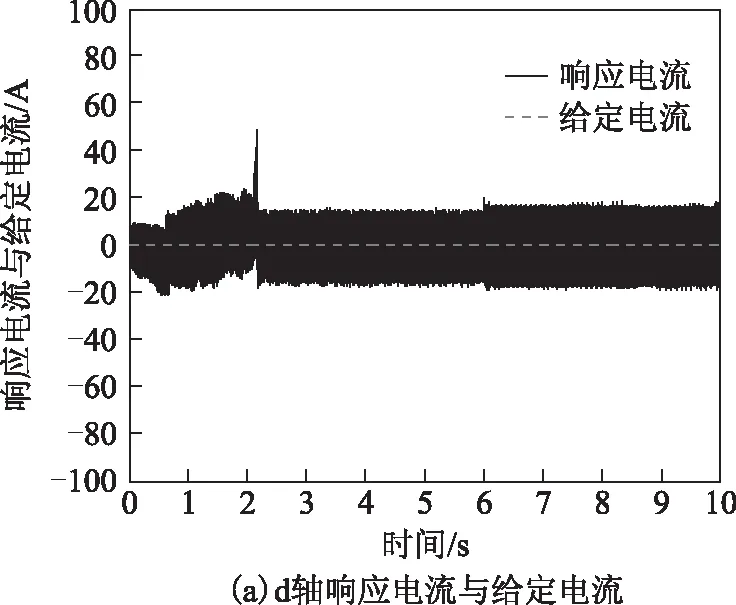

图10 电流响应仿真结果Fig.10 Simulation results of current response

图11 电流偏差仿真结果Fig.11 Simulation results of current error
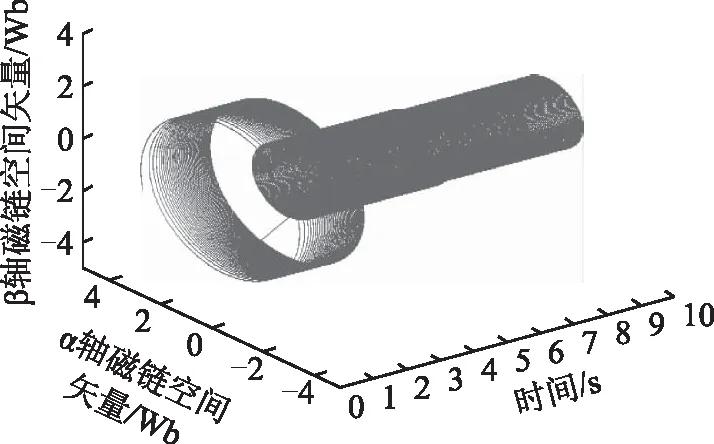
图12 永磁同步电机磁链空间矢量仿真结果Fig.12 Simulation results of flux space vector of the PMSM

图13 定子电流空间矢量幅值仿真结果Fig.13 Simulation results of stator current space vector magnitude
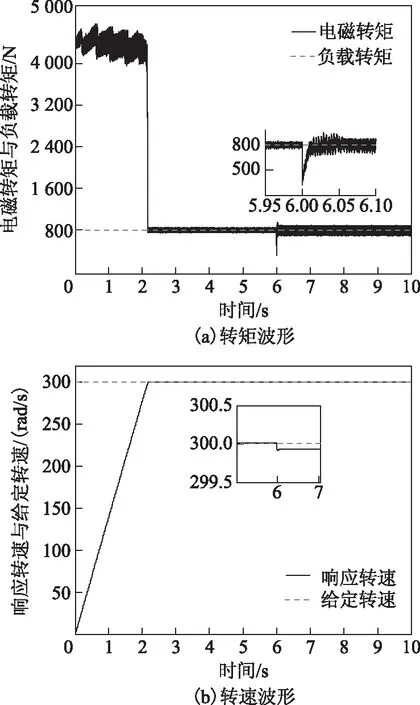
图14 转矩和转速仿真结果Fig.14 Simulation results of torque and speed
由图8、图9可以看出,在6s时永磁体发生失磁故障后,磁链观测器能够准确观测永磁体磁链的变化,且能够准确计算出状态电流观测值。当采用容错预测控制算法时,将状态电流观测值作为反馈量输入到控制器后,d、q轴响应电流能够准确跟踪给定电流,如图10所示。由图11可知,响应电流与给定电流之间的偏差量基本为零,达到了消除电流偏差的目的。由于d、q轴响应电流能够准确跟踪给定电流,从而降低了有效磁链的减少量,所以永磁同步电机磁链空间矢量幅值变化较小,如图12所示。因此维持电磁转矩方程平衡所需要的定子电流较小,在极限值的约束范围内,如图13所示。这将使电磁转矩方程和运动方程成立,即故障电机工作在力矩控制模式,电机稳定运行,如图14所示。
4 实验结果与分析
由于真实电机的失磁情况较难以模拟,所以本文采用仿真机来模拟电机失磁,建立电机系统半实物仿真实验平台,再次验证本文所提理论算法的可行性和有效性。半实物仿真实验由DSP控制器、OP5600仿真机、相关连接线以及软件部分的多电机系统模型和上位机监控界面组成。实验系统使用真实的DSP控制器TMS320F2812,永磁同步电机由RT-lab(OP5600)模拟。
图15为不采用容错预测控制的实验波形。由图15a可以看出,在6s时永磁体发生失磁故障后,响应电流与给定电流之间存在偏差,且响应电流大于给定电流。由图15b可以看出,在6s时永磁体发生失磁故障后,电磁转矩下降,电机减速运行。图16为采用容错预测控制后的实验波形。由图16a可以看出,本文所设计的观测器能准确地观测出状态电流值。由图16b可以看出,采用容错预测控制算法后响应电流可以准确跟踪给定电流。由图16c可以看出,采用容错预测控制算法后电磁转矩可以带动给定负载转矩,电机稳定运行。由图15、图16可知,实验结果与仿真结果一致。
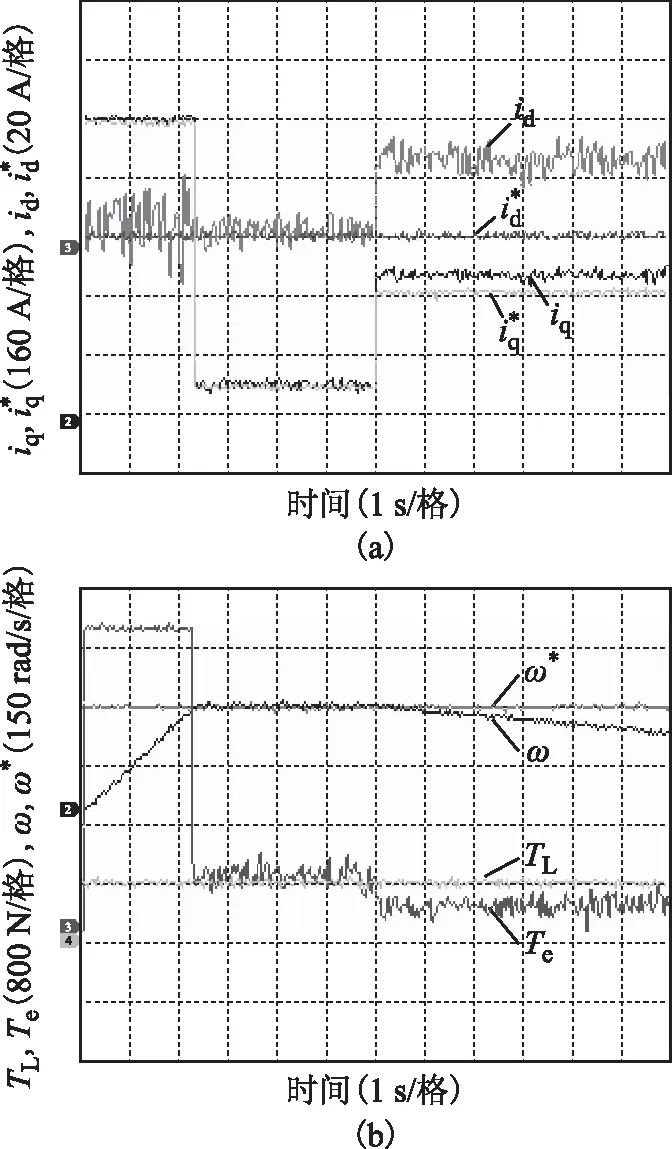
图15 不采用容错预测控制实验波形Fig.15 Experimental wave forms of without the fault-tolerant predictive control
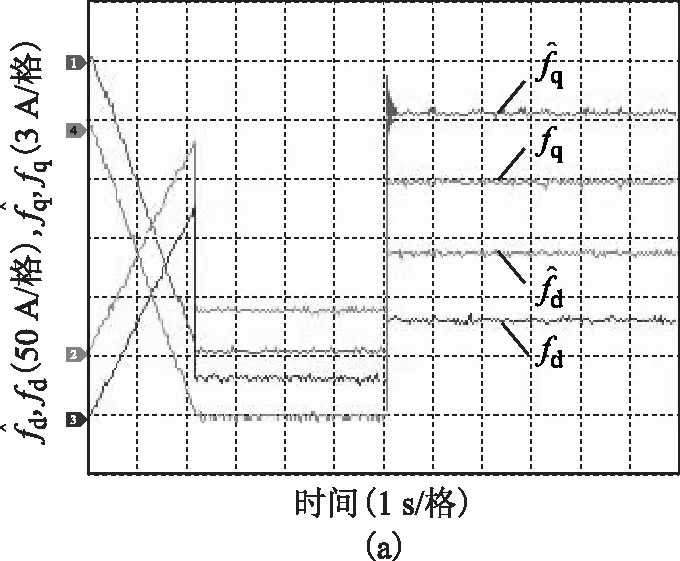
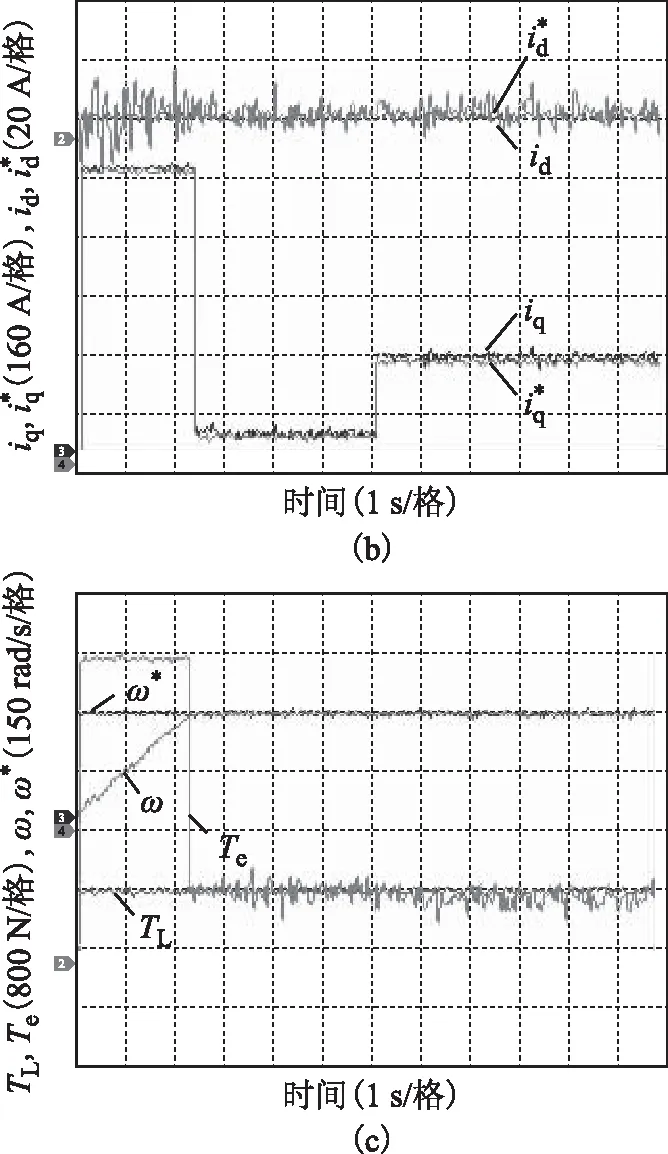
图16 采用容错预测控制实验波形Fig.16 Experimental wave forms of fault-tolerant predictive control
5 结论
在永磁同步电机牵引系统矢量控制的基础上,针对永磁体失磁故障会影响电流控制性能,致使牵引系统带负载能力下降的问题,本文提出了一种基于磁链在线检测的容错预测控制算法。得出以下结论:
1)通过分析永磁体发生失磁故障时对电流控制和电机运行状态的影响,可知失磁故障会导致响应电流矢量与给定电流矢量之间存在偏差。电流偏差将使有效磁链减小,而又由于定子电流受极限值的约束,因此电机将无法工作在力矩控制模式,电机减速运行。
2)本文所提的基于磁链在线检测容错预测控制算法实质是通过在线实时监测永磁体磁链失磁情况,并且实时计算状态电流观测值,将状态电流观测值作为反馈量输入到预测控制器中,以使响应电流准确跟踪给定电流,降低有效磁链的减少量,从而达到容错控制的目的。
3)通过仿真和实验结果证明了该方法能及时对电机失磁故障进行有效控制。为此,该方法有利于拓展永磁同步电机在环境恶劣、可靠性要求较高的场合的应用。
[1]BolognaniS,BolognaniS,PerettiL,etal.Designandimplementationofmodelpredictivecontrolforelectricalmotordrives[J].IEEETransactionsonIndustrialElectronics,2009,56(10):1925-1936.
[2] 吴荒原,王双红,辜承林,等.内嵌式永磁同步电机改进型解耦控制[J].电工技术学报,2015,30(1):30-37.WuHuangyuan,WangShuanghong,GuChenglin,etal.AnimproveddecouplingcontrolstrategyfortheIPMSMS[J].TransactionsofChinaElectrotechnicalSociety,2015,30(1):30-37.
[3]CortesP,KazmierkowskiMP,KennelRM,etal.Predictivecontrolinpowerelectronicsanddrives[J].IEEETransactionsonIndustrialElectronics,2008,55(8):4312-4324.
[4]VargasR,RodriguezJ,AmmannU,etal.Predictivecurrentcontrolofaninductionmachinefedbyamatrixconverterwithreactivepowercontrol[J].IEEETransactionsonIndustrialElectronics,2008,55(4):4362-4371.
[5]HassanAA,KassemAM.Modeling,simulationandperformanceimprovementsofaPMSMbasedonfunctionalmodelpredictivecontrol[J].ArabianJournalforScienceandEngineering,2013,38(11):3071-3079.
[6]ChenHongjun,QuJialong,LiuBo,etal.ArobustpredictivecurrentcontrolforPMSMbasedonextendedstateobserver[C]//IEEEInternationalConferenceonCyberTechnologyinAutomation,Control,andIntelligentSystems(CYBER),2015:1698-1703.
[7]HongJongman,HyunD,LeeSB,etal.Automatedmonitoringofmagnetqualityforpermanent-magnetsynchronousmotorsatstandstill[J].IEEETransactionsonIndustryApplications,2010,46(7):1397-1405.
[8]TorregrossaD,KhoobrooA,FahimiB.PredictionofacousticnoiseandtorquepulsationinPMsynchronousmachineswithstaticeccentricityandpartialdemagnetizationusingfieldreconstructionmethod[J].IEEETransactionsonIndustrialElectronics,2010,59(10):934-944.
[9]CiminiG,FossiV,IppolitiG,etal.Modelpredictivecontrolsolutionforpermanentmagnetsynchronousmotors[C]//IECON2013-39thAnnualConferenceoftheIEEEIndustrialElectronicsSociety,2013:5824-5829.
[10]王伟华,肖曦,丁有爽.永磁同步电机改进电流预测控制[J].电工技术学报,2013,28(3):50-55.WangWeihua,XiaoXi,DingYoushuang.Animprovedpredictivecurrentcontrolmethodforpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalSociety,2013,28(3):50-55.
[11]王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6):39-45.WangHongjia,XuDianguo,YangMing.Improveddeadbeatpredictivecurrentcontrolstrategyofpermanentmagnetmotordrives[J].TransactionsofChinaElectrotechnicalSociety,2011,26(6):39-45.
[12]牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.NiuLi,YangMing,LiuKeshu,etal.Apredictivecurrentcontrolschemeforpermanentmagnetsynchronousmotors[J].ProceedingsoftheCSEE,2012,32(6):131-137.
[13]王庚,杨明,牛里,等.永磁同步电机电流预测控制电流静差消除算法[J].中国电机工程学报,2015,35(10):2544-2551.WangGeng,YangMing,NiuLi,etal.AstaticcurrenterroreliminationalgorithmforPMSMpredictivecurrentcontrol[J].ProceedingsoftheCSEE,2015,35(10):2544-2551.
[14]MariethozS,DomahidiA,MorariM.High-bandwidthexplicitmodelpredictivecontrolofelectricaldrives[J].IEEETransactionsonIndustryApplications,2012,48(7):1980-1992.
[15]JeongSJ,SongSH.Improvementofpredictivecurrentcontrolperformanceusingonlineparameterestimationinphasecontrolledrectifier[J].IEEETransactionsonPowerElectronics,2007,22(5):1820-1825.
[16]张越雷,黄科元,蒋智,等.基于估算电流模型的永磁同步电机无速度传感器控制[J].电工技术学报,2016,31(11):68-74.ZhangYuelei,HuangKeyuan,JiangZhi,etal.SpeedsensorlesscontrolofPMSMbasedonestimatedcurrentmodel[J].TransactionsofChinaElectrotechnicalSociety,2016,31(11):68-74.
[17]王东文,李崇坚,吴尧,等.永磁同步电机的模型预测电流控制器研究[J].电工技术学报,2014,29(1):73-79.WangDongwen,LiChongjian,WuYao,etal.Modelpredictivecurrentcontrolschemeforpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalsociety,2014,29(1):73-79.
[18]HeJing,ZhangChangfan,MaoSongan,etal.Demagnetizationfaultdetectioninpermanentmagnetsynchronousmotorsbasedonslidingobserver[J].JournalofNonlinearSciencesandApplications,2016,29(6):2039-2048.
[19]张宸宇,梅军,郑建勇,等.基于内置重复控制器改进无差拍的有源滤波器双滞环控制方法[J].电工技术学报,2015,30(22):124-132.ZhangChenyu,MeiJun,ZhengJianyong,etal.Activepowerfilterdoublehysteresismethodwithimproveddeadbeatcontrolbasedonbuilt-inrepetitivecontroller[J].TransactionsofChinaElectrotechnicalsociety,2015,30(22):124-132.
[20]CortesP,RodriguezJ,SilvaC,etal.Delaycompensationinmodelpredictivecurrentcontrolofathree-phaseinverter[J].IEEETransactionsonIndustrialElectronics,2012,59(2):1323-1325.
[21]BoldeaI,PaicuMC,AndreescuGD,etal.“ActiveFlux”DTFC-SVMsensorlesscontrolofIPMSM[J].IEEETransactionsonEnergyConversion,2009,24(2):314-322.
[22]NiuFeng,LiKui,WangBingsen,etal.Comparativeevaluationofdirecttorquecontrolstrategiesforpermanentmagnetsynchronousmachines[J].IEEETransactionsonPowerElectronics,2016,31(2):1408-1424.
[23]盖江涛,黄守道,黄庆,等.基于负载观测的永磁电机驱动系统自抗扰控制[J].电工技术学报,2016,31(18):29-36.GaiJiangtao,HuangShoudao,HuangQing,etal.Active-disturbancerejectioncontrollerforpermanentmagnetmotordrivesystemcontrolbasedonloadobserver[J].TransactionsofChinaElectrotechnicalSociety,2016,31(18):29-36.
[24]何亚屏,文宇良,许峻峰,等.基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略[J].电工技术学报,2012,27(3):92-99.HeYaping,WenYuliang,XuJunfeng,etal.High-powerpermanentmagnetflux-weakeningstrategybasedonmulti-modeSVPWM[J].TransactionsofChinaElectrotechnicalSociety,2012,27(3):92-99.
[25]刘金琨.滑模变结构控制MATLAB仿真[M].2版.北京:清华大学出版社,2012.
(编辑 于玲玲)
Fault-Tolerant Predictive Control for Demagnetization Faults in Permanent Magnet Synchronous Machine
ZhangChangfan1WuGongping1HeJing1,2FengJianghua3ZhaoKaihui1
(1.College of Electrical and Information Engineering Hunan University of Technology
Zhuzhou 412001 China 2.College of Mechatronics and Automation National University of Defense Technology
Changsha 410073 China
3.CRRC Zhuzhou Electrical Locomotive Research Institute Co.Ltd Zhuzhou 412001 China)
In the rail transit traction systems,the permanent magnet demagnetization faults in the permanent magnet synchronous motor(PMSM)can lead to the problem of load capacity reduction.A fault-tolerant predictive control method based on the on-line detection of flux linkage is proposed.Firstly,the effect of current control and motor running state caused by demagnetization of permanent magnet will be analyzed in great detail with conforming to predictive control model of permanent magnet synchronous motor.Then,a real-time estimation equation for permanent magnet flux linkage is established based on the equivalent control principle of sliding mode variable structure,whereas the observer is designed based on sliding mode variable structure.Through the permanent magnet flux linkage formula,and then calculate the state current observation value.Finally,a fault-tolerant predictive control algorithm is constructed.The algorithm used state current observation value as feedback to input the fault-tolerant predictive controller.And it can eliminate the current error,which will achieve the purpose of fault-tolerant control.Simulation and experimental results demonstrate the feasibility and effectiveness of the proposed algorithm.
Permanent magnet synchronous motor(PMSM),predictive current control,demagnetization faults,fault-tolerant predictive control
国家自然科学基金(61473117)、湖南省自然科学基金(2016JJ5012,2017JJ4031)和电传动控制与智能装备湖南省重点实验室(2016TP1018)资助。
2016-07-29 改稿日期2016-12-21
10.19595/j.cnki.1000-6753.tces.L70059
TM351
张昌凡 男,1960年生,教授,博士生导师,研究方向为交流传动及故障诊断。
E-mail:zhangchangfan@263.net(通信作者)
吴公平 男,1992年生,硕士研究生,研究方向为电力电子与电力传动。
E-mail:gongping_wu@163.com
猜你喜欢
大电机技术(2022年5期)2022-11-17
湖南电力(2022年3期)2022-07-07
中国特种设备安全(2021年7期)2022-01-19
微特电机(2021年1期)2021-01-25
仪表技术与传感器(2020年5期)2020-06-11
大电机技术(2018年4期)2018-09-26
电测与仪表(2016年10期)2016-04-12
电工技术学报(2015年6期)2015-11-15
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
水电站机电技术(2014年4期)2014-10-13