
基于最优控制的航天器断续姿控系统设计方法
2017-09-03 05:05李延军檀朋硕
导弹与航天运载技术 2017年4期
王 勇,李延军,张 亮,陈 阳,檀朋硕
基于最优控制的航天器断续姿控系统设计方法
王 勇,李延军,张 亮,陈 阳,檀朋硕
(北京宇航系统工程研究所,北京,100076)
传统基于姿控喷管的断续姿控系统多采用经典的斜线开关线设计非线性控制律,系统设计时往往难以同时满足姿控精度、推进剂消耗、喷管开关次数等要求和约束。为进一步优化系统设计,实现各性能指标闭合,提出了基于最优控制的断续姿控系统二次型开关线控制方法,并推导得到了系统姿控精度模型。通过仿真试验对比了传统斜线开关和二次型开关控制的性能。仿真结果表明,两种方法下系统姿控精度计算模型正确,性能指标各有优劣,姿控系统设计时可依据系统约束综合考虑选取不同方案。
非线性控制;最优控制;斜线开关;二次型开关
0 引 言
为节省推进剂,在航天器弹道设计时,往往增加一、二次无动力或小动力飞行段,即滑行段。此外,航天器在主动段飞行结束后,往往增加末助推级,以满足末速修正、载荷释放调姿等需要。在滑行段和末修级飞行段,由于航天器只受到较小的干扰作用,综合系统复杂度、质量和能源等方面考虑,往往采用基于姿控喷管的断续姿控方案[1]。
传统断续姿控系统设计时,往往采用经典的斜线开关线设计非线性控制律。该方法较为成熟,但系统设计时往往难以同时满足姿控精度、推进剂消耗、喷管开关次数等要求和约束[2]。实际上,航天器飞行不同阶段时,姿控精度、调姿速度、推进剂消耗等要求和约束存在差异,姿控系统设计时存在进一步优化的空间。随着控制技术的发展,最优控制等现代控制方法逐渐应用于航天器控制系统设计中[3~6],为航天器断续姿控系统设计提供了更多选择。
本文以三通道解耦后单通道姿控系统设计为例,提出了基于最优控制的断续姿控系统二次型开关控制方法,并推导得到了系统姿控精度模型。开展了两种控制方法下的仿真试验,试验结果表明,两种方案下系统姿控精度计算模型正确,性能指标各有优劣,系统设计时可依据不同飞行阶段性能指标要求等综合考虑选取不同方案。
1 航天器姿态控制系统模型
假定航天器三通道已实现解耦控制,以俯仰通道为例,姿态控制系统原理如图1所示。其中,弹上计算机依据敏感装置测量得到姿态角和角速度,进行控制指令解算,解耦后通过开关放大器推动电磁阀,控制姿控喷管的开闭,实现姿态的稳定和控制。
图1 俯仰通道姿态控制系统原理
1.1 刚体动力学模型
以在真空环境下工作的航天器为例,其俯仰通道刚体动力学模型如下[7]:

式中 Δϕ˙为俯仰姿态角加速度;Mz为俯仰通道量化合成干扰力矩,Mz=Mz/Jz,Mz为俯仰通道干扰力矩,Jz为对应的转动惯量;b3为俯仰通道控制力矩系数;Kϕ为姿控喷管的3个状态,Kϕ=1,0,-1,分别表示修正正向姿态偏差的喷管开启、关闭和修正负向姿态偏差的喷管开启。
1.2 开关放大器特性
开关放大器一般具有滞环的继电特性,为实现断续控制往往设置死区,其特性如图2所示[8]。

图2 带滞环的开关非线性特性
姿控喷管控制信号kϕ取值计算如下:
2 斜线开关控制方法

式中 ϕΔ为姿态角偏差;ϕΔ˙为姿态角速度偏差;b为系统动态增益。
此时,在不考虑延迟情况下:
喷管正向理论开关线为
传统断续姿控系统设计时,姿控喷管开关控制切换线设计为斜线开关,其校正网络传递函数为一阶微分形式,即取:

喷管负向理论开关线为

斜线开关控制时,姿控系统进入稳定后,系统相轨迹无法收敛于零点,而是形成一个稳定的极限环[2]。系统进入极限环状态后,姿态角偏差Δϕ和姿态角速度偏差Δϕ˙的最大值称为极限环参数,分别用ΔϕT和Δϕ˙T表示。当Mz>0时,斜线开关控制律下系统姿控精度为
式中 τ为系统时延,包括开关放大器、姿控喷管以及采用数控方案时的计算与采样时延,本文假定系统开启与关闭时延均为τ。
3 基于最优控制的二次型开关控制方法
3.1 二次型开关控制律设计
采用最优控制理论设计断续姿态控制系统控制律。以俯仰通道为例,状态方程为

式中 x=[ϕ, ϕ˙]T;x0为系统初始状态;u为开关控制量,只有3个值1,0和-1;A为系数矩阵;B为控制矩阵,且

采用时间最优控制时,系统的性能指标J为

应用极小值原理,取系统哈密尔顿函数H为

解式(13)得:

由极小值原理可以得:
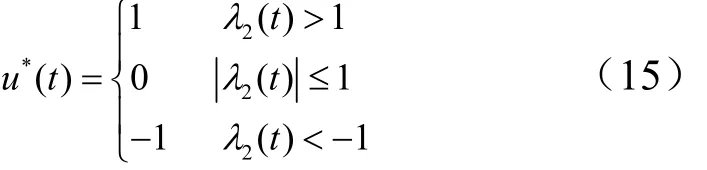
经推导,综合考虑开关放大器工作特性,得到二次型开关控制律,开关曲线方程为
3.2 控制精度分析
考虑开关放大器滞环特性的二次型开关控制相平面极限环曲线如图3所示。
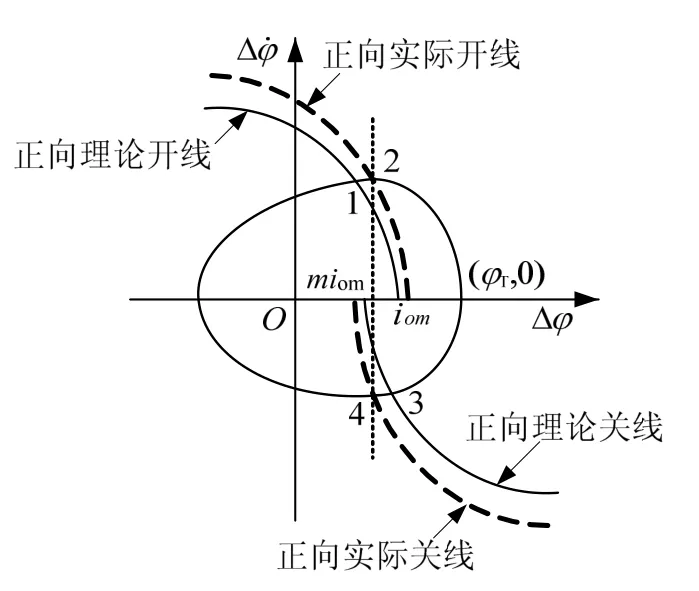
图3 二次型开关控制对应的极限环
假设点1、2、3的坐标分别为(Δϕ1,Δϕ˙1)、(Δϕ2,Δϕ˙2)、(Δϕ3,Δϕ˙3)。由于点2与点4对称,其坐标为(Δϕ2,−Δϕ˙2)。
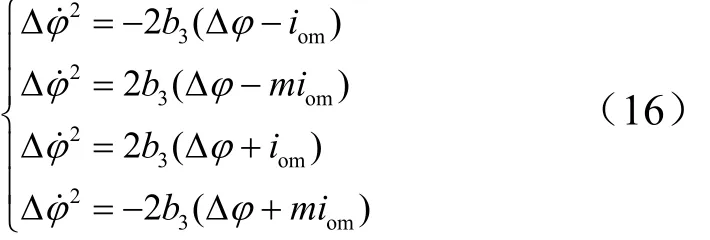
根据刚体动力学方程以及二次型开关控制方程,不难得到以下关系式:
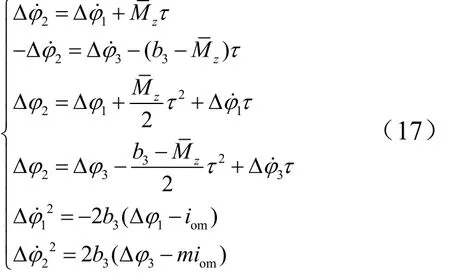
求解可得:

式中B=(b3+2Mz)τ;C=2(Mz
2−b32)τ2+b3( m−1)iom。推导可得二次型开关曲线下系统姿控精度为
4 仿真验证
以单通道为例,仿真分析传统斜线开关控制和二次型开关控制方法的性能。仿真初始条件假设如下:
a)继电器滞环系数m=0.9;
b)系统开启和关闭时延τ相等,取值为50 ms;
c)控制力矩系数和干扰力矩系数取值分别为

d)姿态初值设置为ϕΔ=-3°,ϕΔ˙=-3(°)/s。
4.1 斜线开关控制仿真结果
仿真分析传统斜线开关控制方法下系统姿态控制过程和稳定情况。设计选取b=0.6,开关门限omi=1°。各仿真曲线如图4至图8所示。
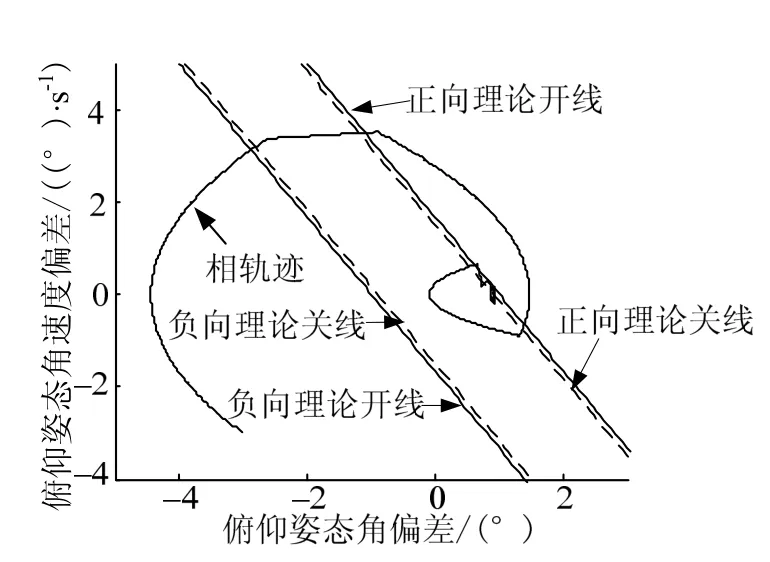
图4 斜线开关控制下系统相轨迹
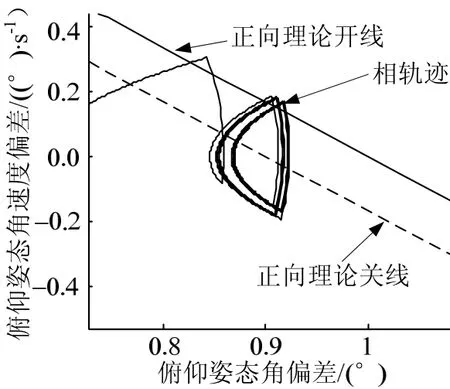
图5 斜线开关控制下系统极限环

图6 斜线开关控制姿态角偏差
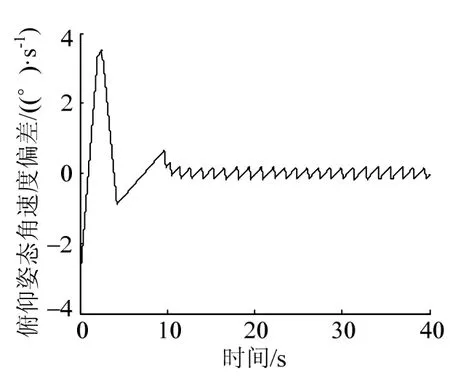
图7 斜线开关控制姿态角速度偏差
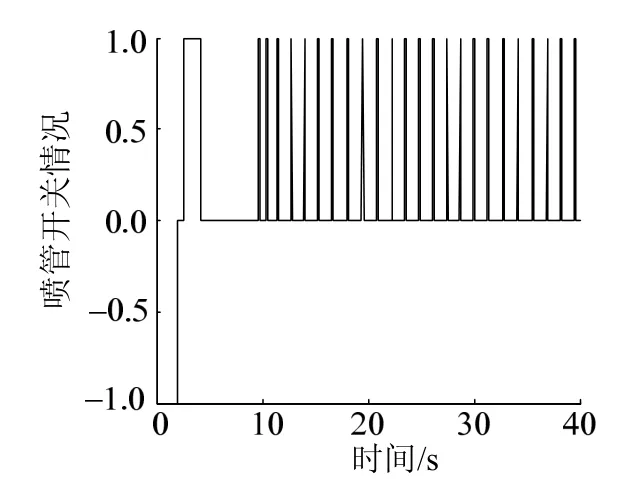
图8 斜线开关控制喷管开关情况
由图4至图8可以看出,系统在10.3 s左右进入稳定极限环,极限环最大姿态角偏差约0.93°、最大姿态角速度偏差约0.17°,姿控精度理论模型计算值与仿真结果基本一致,验证了理论模型的正确性;进入极限环后,姿控喷管每1 s左右开启一次,每次开启约0.15 s,在40 s的仿真时间内,喷管共开启27次,开启总时间7.0 s。
不同开关门限omi下斜线开关控制仿真结果如表1所示。
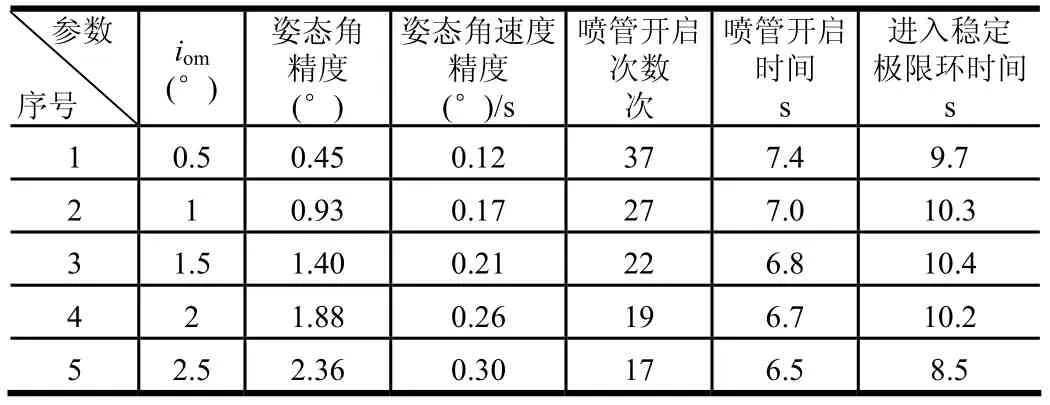
表1 斜线开关控制不同参数下仿真结果
4.2 二次型开关控制仿真结果
仿真分析二次型开关控制方法下系统姿态控制过程和稳定情况。设计选取开关门限omi=1°时。二次型开关控制下各仿真曲线如图9至图12所示。
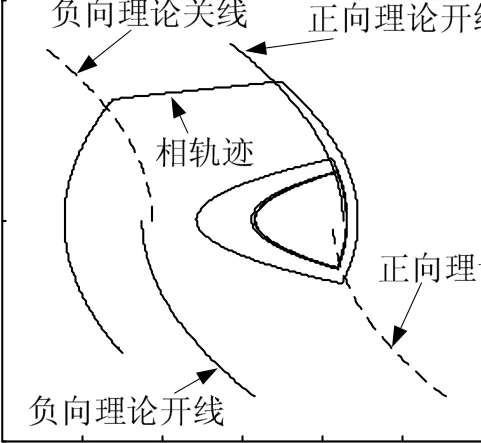
图9 二次型开关控制下系统相轨迹
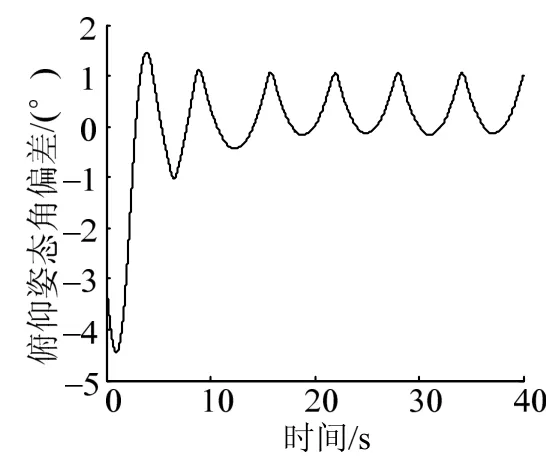
图10 二次型开关控制姿态角偏差
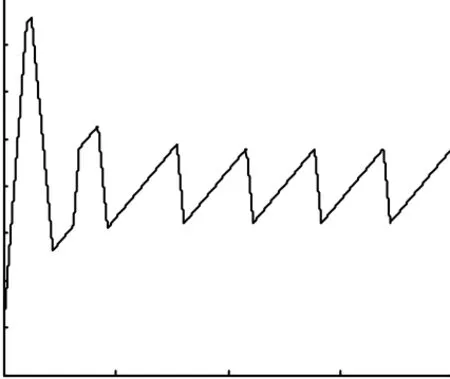
图11 二次型开关控制姿态角速度偏差
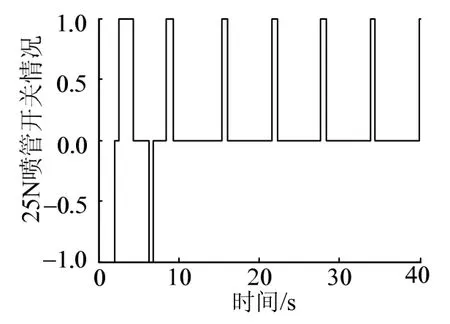
图12 二次型开关控制喷管开关情况
由图9至图12可知,系统在约8.5 s进入稳定极限环,极限环最大姿态角偏差约1.06°、最大姿态角速度约0.79°,姿控精度理论模型计算值与仿真结果基本一致,验证了理论模型的正确性;进入极限环后,姿控喷管每6 s左右开启一次,每次开启约0.8 s,在40 s仿真时间内,喷管共开启10次,开启总时间7.9 s。
不同开关门限omi下二次型开关控制仿真结果如表2所示。
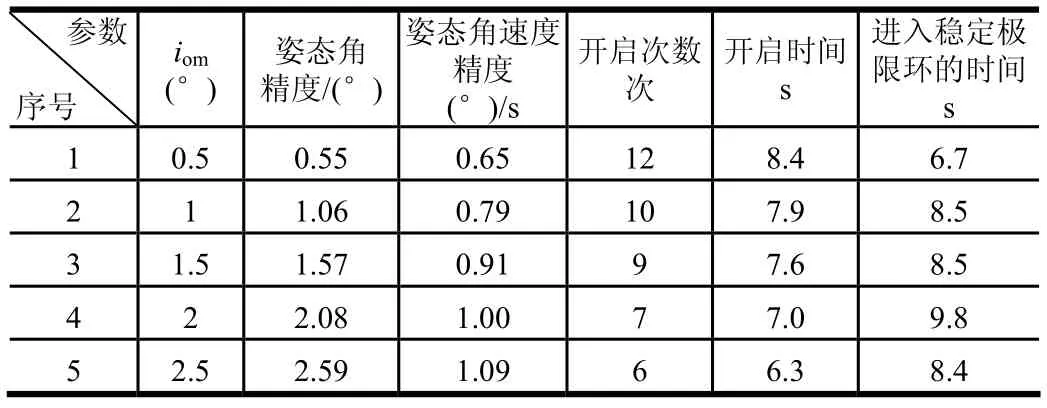
表2 二次型开关控制不同参数下仿真结果
对比表1和表2可以看出,在同样的开关门限下,斜线开关控制下姿态角控制精度稍好,姿态角速度控制精度更高;二次型开关控制下喷管开启次数更少,系统进入稳定极限环时间稍短。
5 结 论
a)斜线开关控制和二次型开关控制两种方法各有其优缺点;
b)在相同的开关门限下,斜线开关控制时系统姿态角和姿态角速度精度更高,但喷管开启次数更多,单次开启时间更短,对喷管性能指标要求更严;
c)在相同的开关门限下,二次型开关控制时系统姿态角精度稍差,姿态角速度精度较差,但喷管开启次数少,单次开启时间长,且系统进入稳定极限环时间更短;
d)姿控系统设计时,可依据姿控精度、推进剂消耗、喷管开关次数等约束综合考虑选取不同控制方案。
[1] 龙乐豪. 总体设计(中)[M]. 北京: 宇航出版社, 1993.
[2] 孙赵根. 最优非线性控制技术在导弹控制中的研究与应用[J]. 航天控制, 2005, 23(1): 41-44.
[3] 黄颖, 韩帅帅, 王璐, 郭毓. 挠性航天器姿态机动路径设计及最优控制[J]. 华中科技大学学报(自然科学版), 2015, 43(1): 27-31.
[4] Zhang G, Yang L, Zhang J, et al. Longitudinal attitude controller design for aircraft landing with disturbance using ADRC/LQR[C]. Madison: Proc of the 2013 ΙEEE Ιnternational Conference on Automation Science and Engineering(CASE), 2013.
[5] Tepa-Garran P, Garcia G. ADRC tuning deploying the LQR approach for decoupling uncertain MΙM systems[J]. Ιnformation Technology and Control, 2014, 43(2): 157-165.
[6] 林枫, 刘国刚. 最优控制与姿控喷流在导弹姿态控制中的应用[J]. 航天控制, 2004, 22(3): 20-22.
[7] 张艳, 李世鹏. 在轨航天器非线性姿态控制系统稳态特性研究[J]. 导弹与航天运载技术, 2012(4): 10-14.
[8] 陈世年. 控制系统设计[M]. 北京: 中国宇航出版社, 1996.
An Optimal Control Method for Discontinuous Attitude Control System of Spacecraft
Wang Yong, Li Yan-jun, Zhang Liang, Chen Yang, Tan Peng-shuo
(Beijing Ιnstitute of Astronautical System Engineering, Beijing, 100076)
Slantwise on-off switching line is ordinarily used for discontinuous attitude control system of spacecraft, while it is not easy to satisfy the requirement of accuracy, attitude control speed, propellant consumption and nozzle on-off time at the same time. Ιn order to optimize system design and offer more choice, linear quadratic control method is derivate based on optimal control theory, and the attitude control accuracy is deduced. Attitude stabilization process is simulated using both methods. Simulation results show that the accuracy model is accurate; both methods have its advantage and disadvantage, thus provide more choice for discontinuous attitude control system design.
Nonlinear control; Optimal control; Slantwise on-off switching line; Linear quadratic control
V448.22
A
1004-7182(2017)04-0063-05 DOΙ:10.7654/j.issn.1004-7182.20170415
2016-10-22;
2017-01-19
王 勇(1987-),男,工程师,主要研究方向为飞行控制
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
电脑知识与技术(2020年15期)2020-07-04
科技传播(2019年22期)2020-01-14
电子制作(2018年1期)2018-04-04
财会学习(2018年2期)2018-01-24
科技视界(2015年20期)2015-01-16
飞碟探索(2013年2期)2013-08-13
意林(2010年4期)2010-05-14
