船舶综合电力系统建模与故障仿真
2017-10-14 13:15施伟锋卓金宝
船电技术 2017年8期
董 钰,施伟锋,张 威,卓金宝
船舶综合电力系统建模与故障仿真
董 钰,施伟锋,张 威,卓金宝
(上海海事大学,上海 201306)
船舶电力系统发生故障会影响船舶的安全运行。采用数字仿真技术可以方便地对船舶电力系统故障进行仿真,应用MATLAB/SimPowerSystem软件建立环形配电的电力系统仿真模型并进行船舶在正常工况和发生常见短路故障时的仿真与研究。根据对所建模型进行故障仿真所得出的参数变化情况,可以有效地分析故障发生的原因和影响,从而减少此类故障的发生。
船舶电力系统 建模 故障仿真 短路
0 引言
船舶电力系统的主要功能是为船舶上配置的各种机械设备提供电能,并且通过输电线路将电能配送至各用电设备。近年来,电力推进凭借机动性能好、操作灵活等特点得到了很好的推广,同时船舶的运行工况较多,因此对船舶电力系统的故障分析更为关键。
常见的船舶电力系统故障类型有大负荷扰动,短路,断路等。当船舶电力系统某个部位发生故障时,很可能影响到其他电气设备甚至波及到整个电力系统,产生严重的后果[1]。若某处发生故障时,系统可以马上识别故障并排除故障,就能保证船舶的正常运行。采用计算机数字仿真技术,能在不发生实际故障的条件下通过对电力系统建模仿真得到故障时系统中各项参数的变化情况,为故障机理的研究提供有效的数据支持。目前有许多文献对船舶电力系统建模并仿真,研究发生故障时系统中参数的变化情况,以便更好地了解故障机理。文献[2]中的模型是树状配电的船舶电力系统,文献[3]中的模型是以柴油发电机组为发电单元的船舶区域配电系统,两者均对系统中短路故障进行了仿真与分析;文献[4]对船舶电力系统中突加、突减大负荷进行了仿真,文献[5]则对船舶模拟训练电力系统模型的多种常见故障状态进行了仿真试验。
本文搭建的船舶电力系统模型属于中压混合动力系统,额定电压为4160 V,以两台柴油发电机组和两台燃气轮机发电机组构成发电单元,采用环状电网供电,且对此模型进行短路故障仿真与分析。
1 船舶综合电力系统模型
在该船舶综合电力系统模型中,发电单元由两台参数相同的柴油发电机组G1、G2和两台参数相同的燃气轮机组G3、G4组成,M1、M2表示电力推进电机,T1-T4表示变压器,L1-L4表示电力系统负载。
1.1发电机组模型
船舶上的发电机组是将机械能等其他形式能量转化为电能的装置,在该模型中,柴油发电机组采用标幺制的凸极同步发电机模型,燃气轮机组采用标幺制的隐极同步发电机模型。
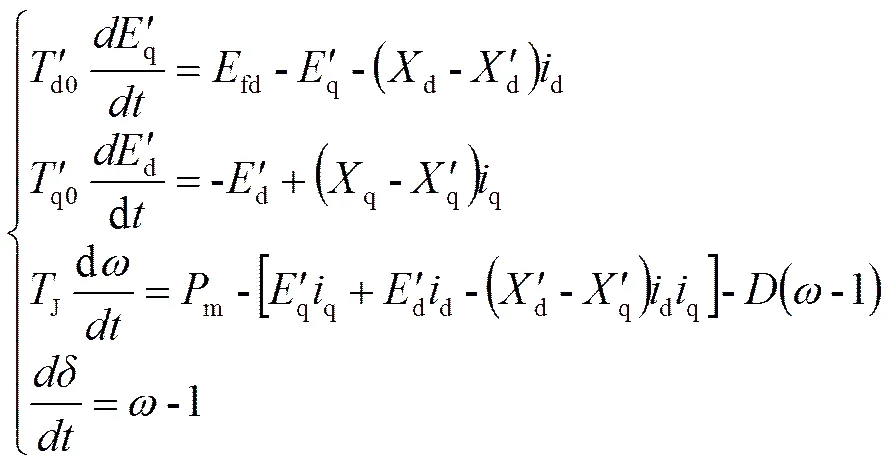
发电机组可用如下四阶动态方程描述:
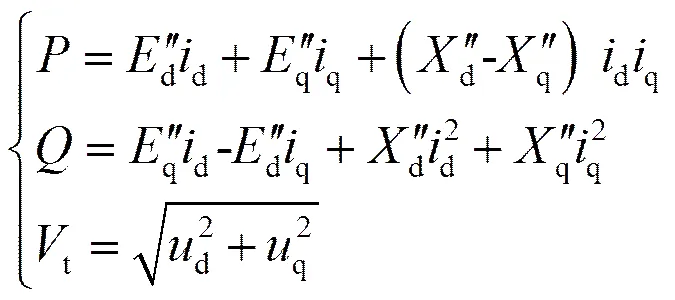
发电机输出的有功功率、无功功率和端电压表达式如下:
1.2推进电机模型
推进电机是船舶电力系统中最主要的大功率负载,它可以实现机械能与电能之间的相互转化,从而使船舶前进。通常,永磁同步电动机和异步电动机都可以作为推进电机。本模型将标幺制的鼠笼异步电动机模型作为推进电机模型。其中笼型转子的结构比较特别,为了便于分析,将静止坐标系中的异步电动机模型转换到d-q坐标系,可用如下四阶电压平衡方程[6]描述:
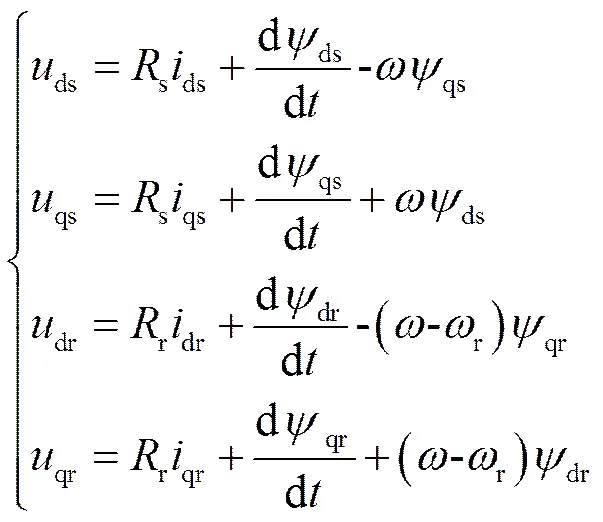
其中,、、、、、分别表示直轴和交轴的定子电流、电压和磁通;、、、、、分别表示直轴和交轴的转子电流、电压和磁通;为转子同步角速度;为转子电气角速度;为定子电阻;为转子电阻。
设螺旋桨转矩与电机转速满足如下关系[7]:
其中,p表示螺旋桨转矩;pQ表示转矩系数;表示静水密度;表示螺旋桨直径;p表示转速。
1.3输电线与负载模型
在该船舶综合电力系统中,由于输电线路较短,采用RLC串联支路等效输电线。在建模时,系统中的负载比较复杂,一般被分为照明设备、电子设备等静态模型和电机负载等动态模型,本模型中的负载模型采用SimPowerSystem中提供的静态负载模型,即R-L负载。
静态负载在d-q-0坐标系中满足微分方程[8]:
1.4 船舶综合电力系统模型的建立
根据图1的电力系统结构图,综合以上建立的各部分模型,可得到以下船舶综合电力系统模型,如图2所示。

图2 船舶综合电力系统仿真图
2 船舶综合电力系统仿真与分析
2.1短路故障分析
在船舶电力系统中,导致发生短路故障的原因可能为人为误操作或者绝缘损坏[9]。当某个位置短路时,系统中会产生几倍于正常电流的短路电流,可能损坏系统中的设备。除此之外,大的短路电流还会使电网电压大幅度降低,导致用电设备的工作受到影响,甚至会使整个电力系统不能稳定运行。
本文基于IEC61363标准分析电力系统的短路电流,采用以下假设[10]以便计算。
1)系统中的电容均忽略不计,短路电弧阻抗均忽略不计;
2)若某处短路,则该处的相电压瞬时值为零且短路电流的路径不随短路故障的发生而变化;
3)电力系统中三相同时发生短路;
4)故障发生前发电机正常运行。
由于无功元件不会产生短路电流,某处发生短路时只有发电机和电动机会产生短路电流。因此短路点的短路电流是系统中所有发电机和电动机产生的短路电流总和。
同步发电机产生的短路电流计算方法为[11]:
(7)
(8)

(10)
异步电动机产生的短路电流计算方法如下:
(12)
(13)

2.2船舶综合电力系统模型参数
仿真系统电机参数如下:
该模型的负荷参数如表1:
2.3仿真分析
通过对该综合电力系统模型在正常运行的情况下进行仿真来验证该模型的正确性[12],再分析船舶电力系统发生短路时的各项参数变化。
1)正常工况
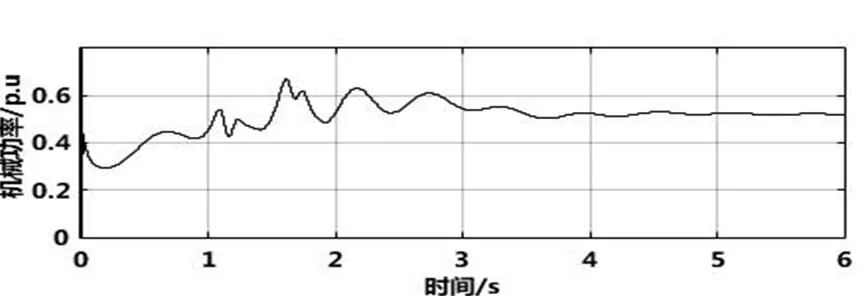
图3为正常工况下,船舶中发电机G1的轴功率、A相电压和A相电流的变化图像。从图中可以看出,启动后,发电机的轴功率增大,在1.6 s达到峰值0.7 pu,经过4 s的波动后稳定在0.52 pu,A相电压经过4 s的波动后稳定在5900 V,A相电流也逐渐稳定在700 A,说明发电机能够稳定运行。
2)单相短路故障
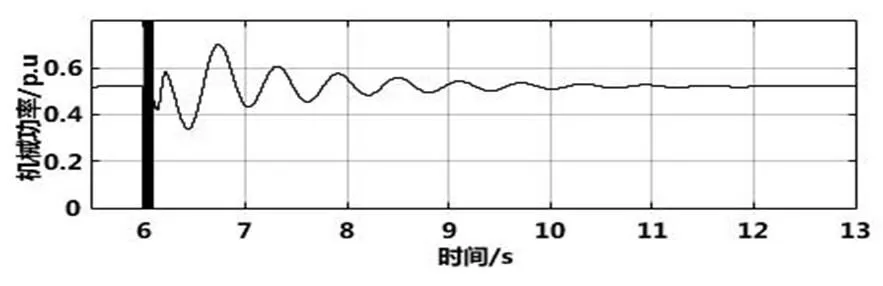
对该船舶综合电力系统模型进行发电机G1端和负载L1端单相接地短路故障仿真,设置为6 s时单相短路故障,持续0.1 s,在6.1 s时切除故障,故障相为a相。
从图4可以看出,G1发电机6 s单相短路后,发电机轴功率开始波动,12.5 s时趋于稳定;发电机A相电压由5875 V突降到3000V,A相电流由665 A突增到73500 A。
从图5可以看出,当6 s时负载L1端单相短路故障发生时,发电机G1的轴功率从0.53 pu突增为1.1 pu;发电机A相电压由稳定值5850 V突降到2950 V,发电机A相电流由稳定值680 A突增到5050 A,切除故障后,经过5 s的波动逐渐恢复到700 A。
3)三相短路故障
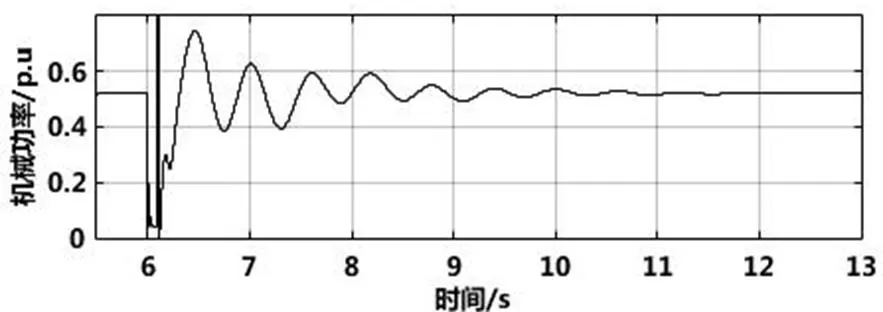
三相短路是对称短路,对电网危害较大。对该系统模型的发电机G1端和负荷L1端进行三相短路故障仿真,设置为6 s三相短路故障,持续0.1 s,6.1 s时切除故障,故障相为a相。
从图6可以看出,在G1发电机6 s发生三相短路后,发电机G1的轴功率开始波动,A相电压由5850 V突降到0 V,A相电流由670 A突然增加到60000 A,切除故障后恢复至700 A。
从图7可以看出,负荷L1端在6 s三相短路后,发电机G1的轴功率开始波动,6.1 s切除故障后,经过7s轴功率恢复至稳定值0.52 pu;发电机A相电压由5850 V突降到0 V,A相电流由670 A突增降到4800 A,切除故障后稳定至700 A。
对比单相短路和三相短路的参数变化图像可知,三相短路较单相短路危害更大,参数变化幅度大,使电力系统不能稳定运行。无论是单相短路还是三相短路,都会在短路瞬间产生非常大的短路电流,引起电力系统的波动。
3 结论
本文在MATLAB/SimPowerSystem的环境下建立了中压混合动力的船舶综合电力系统模型,着重进行了不同位置的单相短路故障和三相短路故障仿真,得到了短路故障发生时电力系统各参数的变化图像。通过分析可知不同位置、不同故障类型对电力系统的影响不同。单相短路和三相短路都会在电网中产生非常大的短路电流,但三相短路故障对系统危害更大,这对保证船舶安全可靠运行具有重要意义。

[1] 兰海, 卢芳, 孟杰. 船舶电力系统[M]. 北京: 国防工业出版社, 2013.
[2] 王胜, 施伟锋, 张威, 等. 船舶电力系统负荷扰动故障机理研究[J]. 通信电源技术, 2015,32(5): 58-61.
[3] 张威, 施伟锋, 周俊深. 船舶区域配电系统建模与故障仿真分析[J]. 中国航海, 2013, 6(4): 42-46 .
[4] 王满, 王浩亮. 船舶电力系统仿真[J]. 大连海事大学学报, 2011, 37(1): 35-38
[5] 潘昕, 侯新国, 夏立, 冯源. 船舶电力系统的建模与仿真[J]. 电力科学与工程, 2013,29(04): 49-53.
[6] 施伟锋, 许晓彦. 船舶电力系统建模与控制[M]. 北京: 电子工业出版社, 2012.
[7] 卓金宝, 施伟锋, 张威. 船舶电力系统中燃气轮发电机组建模与仿真[J]. 计算机仿真, 2016,33(12):143-147.
[8] 王焕文. 舰船电力系统及其自动装置[M]. 北京: 科学出版社, 2004.
[9] 庞科旺. 船舶电力系统设计[M]. 北京: 机械工业出版社, 2010.
[10] 中国船级社. 钢制海船入级规范2006(第4分册)[M]. 北京: 人民交通出版社, 2006.
[11] 邰能灵, 王鹏, 倪明杰. 大型船舶电力系统关键技术与应用[M]. 北京: 科学出版社, 2012.
[12] 赵岩. 船舶电力系统短路电流计算方法研究[D]. 黑龙江: 哈尔滨工程大学, 2009.
Modeling and Fault Simulation of Ship Integrated Power System
Dong Yu, Shi Weifeng, Zhang Wei, Zhuo Jinbao
(Shanghai Maritime University, Shanghai 201306, China)
TM743
A
1003-4862(2017)08-0064-05
2017-04-06
董钰(1993-),女,硕士生。研究方向:船舶电力系统及其自动化。E-mail: 1320855215@qq.com
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
科技经济市场(2019年3期)2019-05-16
电子制作(2019年23期)2019-02-23
广东造船(2018年4期)2018-10-09
广西电力(2016年1期)2016-07-18
电气化铁道(2016年5期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22