PID控制在并联型有源电力滤波器中的有效性研究
2017-10-24 02:33◎吴萍
三门峡职业技术学院学报 2017年3期
◎吴 萍
技术与应用
PID控制在并联型有源电力滤波器中的有效性研究
◎吴 萍
(三门峡职业技术学院 电气工程学院,河南 三门峡 472000)
对比分析了PI及PID控制器各自的特点及幅频特性。利用PSCAD仿真软件,对PID控制器在APF中的应用进行了仿真试验,得到了其在电流源负载情况下的滤波效果。试验结果表明:通过合理调节PID控制器比例系数、积分常数和微分常数,可使系统获得较高的稳态性能和较好的动态特性,但同时也发现它在滤除特定频次谐波的同时放大了其他频次的谐波电流。
PID控制;有源电力滤波器;谐波抑制
为保障电网的安全、经济、稳定运行,确保设备正常工作,必须进行谐波治理。谐波污染主要源于非线性用电设备和电力电子设备的广泛采用产生的大量谐波电流和无功电流[1-2]。有源电力滤波器APF(Active Power Filter)是抑制谐波、补偿无功、补偿负序电流和零序电流、提高电能质量的有力措施之一,与传统的无源电力滤波器PPF(Passive Power Filter)相比,它能实时跟踪电网谐波电流与频率的变化,实施动态、准确的补偿,且结构轻巧,运行灵活,具有很好的经济效益与应用前景。国外一些国家已将APF作为改善电能质量的关键技术和措施运用于工业生产,但APF在国内的工业应用尚不成熟,还有许多关键的技术问题需要进一步研究与解决。
控制策略是APF正常运行的重要保障,它直接影响APF的补偿精度与动态特性。PI控制器能较好地改善系统的稳态性能,但不宜应用于有较大惯性滞后的控制系统。通过合理调节PID控制器比例系数、积分常数和微分常数,可使系统获得较高的稳态性能和较好的动态特性。
1 并联型APF的基本构成
由文献[3、4]可知,APF的基本构成主要包括主电路、谐波检测、控制系统、耦合变压器等。其主电路由VSI以及输出滤波器组成。APF主电路中的变流器既可以工作于逆变状态,产生补偿电流;也可以工作于整流状态,通过电网向APF直流侧充电储能,为便于研究和保证通用性,这里统称其为电压源逆变器(Voltage Source Inverter,VSI)。VSI主要由两部分组成[3],即电力电子开关器件IGBT和直流侧电容器C,IGBT组成的三相六臂逆变桥的作用是将电容器上的直流电压逆变为具有一定频率和幅值的交流电压。输出滤波器OF环节负责将VSI与电网耦合在一起,同时可以滤除VSI输出电流中的高次谐波电流。
(1)谐波检测环节
谐波检测主要由CT、预处理环节、PT、采样保持与A/D转换等部分构成。
(2)控制系统
控制系统主要包括电网电压和负载电流信号的检测、参考电流计算、控制方法实现和PWM调制几个环节[3],如图2所示。
由控制算法对电压电流检测环节输出的数字信号进行计算,按照检测结果用一定控制方法产生触发脉冲,之后,APF的变流器经主开关驱动电路控制产生相应的补偿电流。APF的控制系统有模拟控制、数字控制、模拟数字混合控制三种类型。近年来,随着单片机和DSP技术日趋发展,APF由模拟控制逐步向模数混合控制以及纯数字控制转换。
(3)主电路
APF的主电路按照结构不同,一般可分为三相三线制和三相四线制两种,同时这两种结构中又包含许多其他的结构[4],应用时,可结合系统实际情况以及不同结构特点,灵活选用。
(4)耦合变压器
对10kV及以上电力系统,受现有开关器件电压与电流容量的限制,逆变器的电压和电流一般经耦合变压器接入电力系统中,而非直接接入。耦合变压器可使电网与APF绝缘隔离,还可以充分利用开关器件的容量,灵活改变逆变器的输出电流和电压;但同时,它也有诸如工作频带较宽、铁芯结构特殊、绕组接法复杂、漏抗要求较高等缺点。
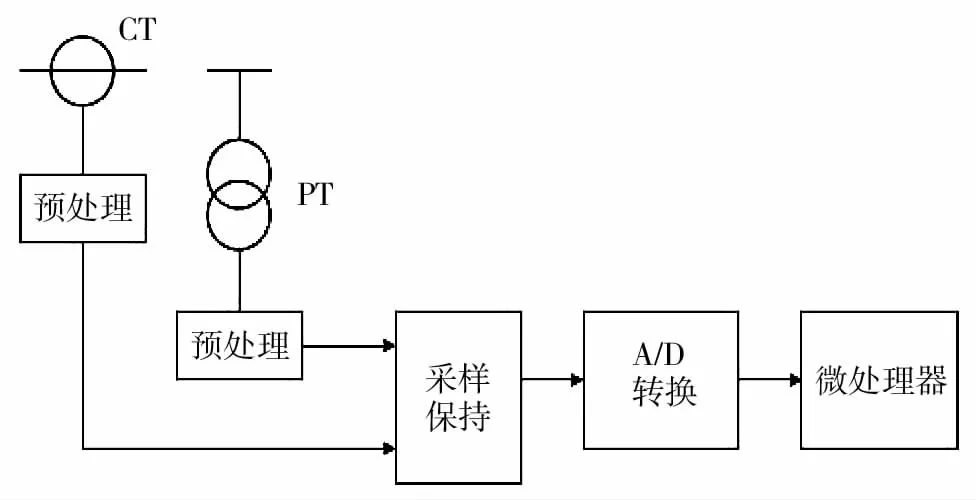
图1 APF的谐波检测环节原理

图2 APF的控制系统原理
2 PI、PID控制的原理分析
2.1 有源电力滤波器系统结构图
据此可得APF电流跟踪控制系统 (如图4)所示。
图4中,G1(s)可以是上述PI或PID环节。G2(s)表示PWM变换器的等效控制框图,因PWM开关频率比较高,忽略采样延迟以便于分析,如此一来,PWM变换器用简单的增益环节等效,即G2(s)=KPWM。图中,L表示PWM输出电感,R表示L的等效内阻。在计算中,取R=0.01Ω,L=0.4mH。APF电流跟踪控制系统的开环传递函数为:
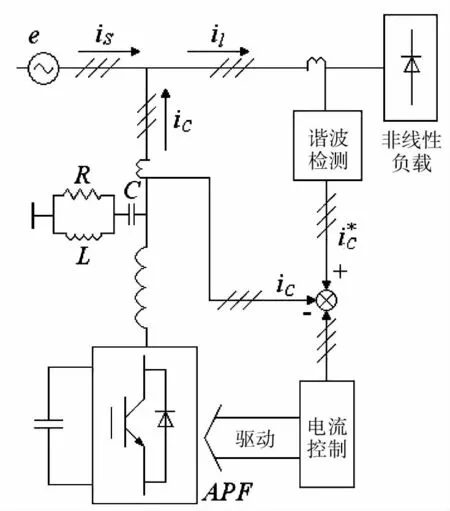
图3 有源电力滤波器系统结构
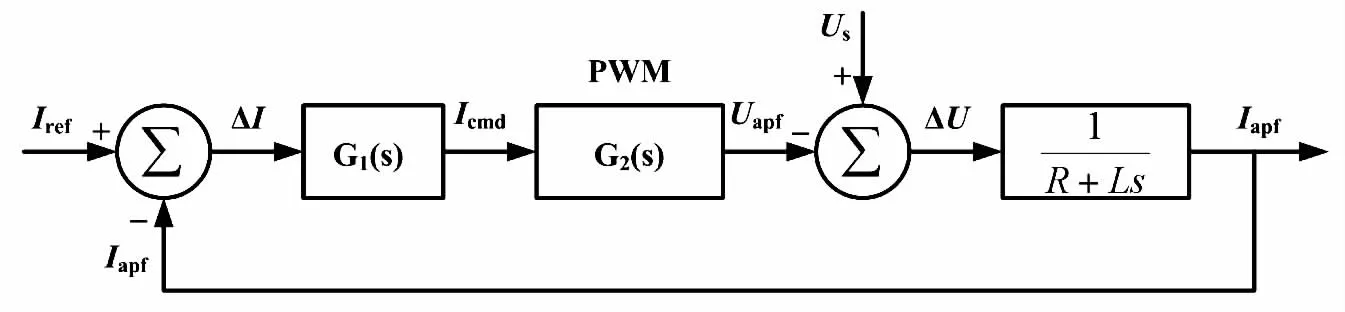
图4 APF电流跟踪控制系统

在下面的计算中令G2(s)=KPWM=1。
同时可得APF电流跟踪控制系统的单位负反馈的闭环传递函数GAPFc为:

2.2 开环特性分析
采用 PI环节时,G1(s)=Gpi(s)=Kp+Ki/s=0.1+1/(0.000008s),
G1(s)=GPID(s)=GPI(s)*GPD(s),GAPF(s)=1用MATLAB仿真得到两者相应的Bode图如图5所示,其中gapf曲线为PI环节,gapf1为PID环节。
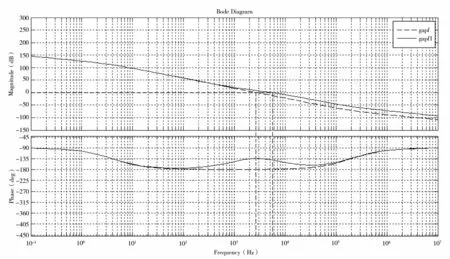
图5 采用PI和PID环节时的开环传函Bode
对比可知:PI控制的相角裕量接近0度,PID控制的相角裕量约39度,因此PID控制的相角裕量更大,稳定性更好;PI控制对参考电流的增益最大可至130,PID控制对参考电流的增益最大可达150,它们在滤除特定频次谐波的同时放大了其他频次的谐波电流,这是滤波控制中不希望出现的结果。
2.3 闭环特性分析
由图4可得APF电流跟踪控制器的单位负反馈的闭环传递函数GAPFc为:

下表给出了图4所示的APF中分别采用PI、PID控制的闭环传函暂态特性仿真试验结果。
对比可知:采用PI控制时,系统的暂态过程持续时间为0.598s,暂态到稳态之间的过渡时间为0.052s,暂态过程中电流曲线上升陡度较大。采用PID控制时,系统的暂态过程持续时间为0.576s,暂态到稳态之间的过渡时间为0.029s,暂态过程的持续时间以及暂态到稳态之间的过渡时间都比PI控制更短,其暂态性能优于PI控制,但暂态过程中电流曲线上升陡度仍然较大。
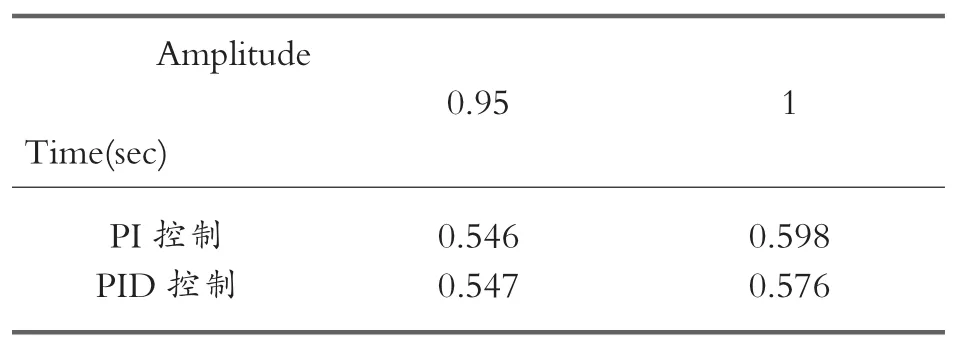
PI、PID控制的闭环传函暂态特性参数表
3 PI、PID控制在APF中的应用仿真
假设APF的非线性负载为一个理想电流源,电流源是幅值为定值的5次谐波电流。此时APF的电路原理图如图6所示,其传递函数原理框图如图7。
图 7 中,G1(s)可以是 PI或 PID 控制环节,下面对各环节滤除幅值为300A的5次谐波电流的效果分别进行仿真。
下图8、图9分别为PI和PID控制时的滤波效果。
PI控制下的5次谐波电流幅值为13.5537A,图中参考电流波形曲线Iref2a与APF输出电流波形曲线Iapf重合度较低,即输出电流不能较好地跟踪参考电流的变化,谐波吸收率较低。
PID控制下的5次谐波电流幅值为13.1107A,图中参考电流波形曲线Iref1a与APF输出电流波形曲线Iapf重合度相对也较低,谐波电流的补偿效果优于PI控制,但也不够理想。
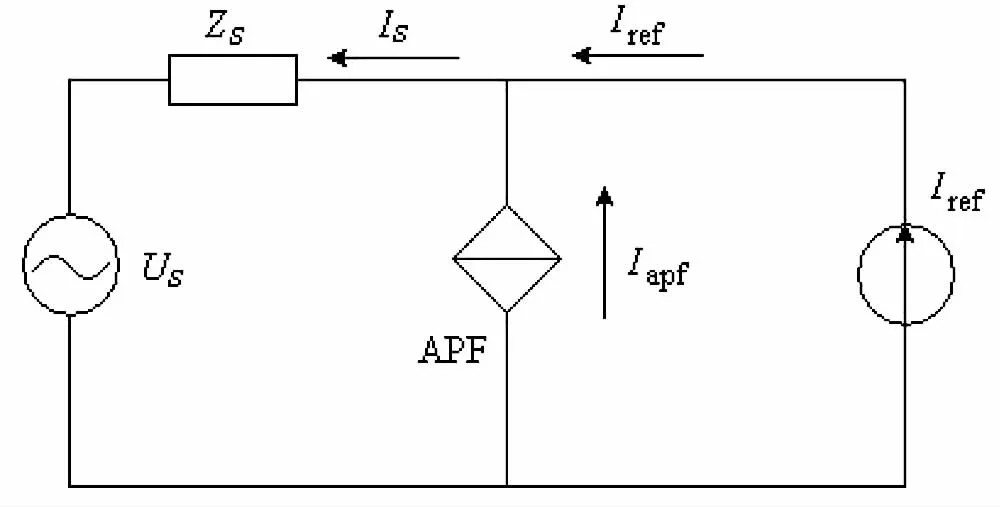
图6 电流源负载的APF结构原理
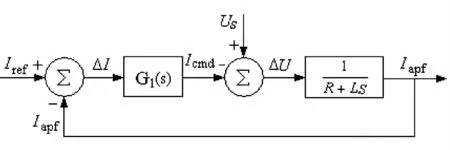
图7 电流源负载的APF原理
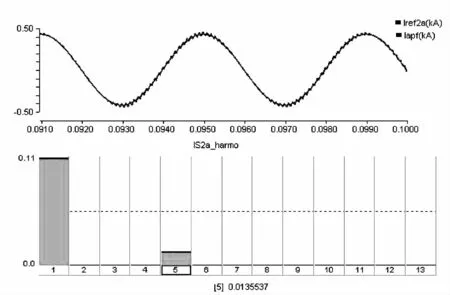
图8 PI控制的滤波效果
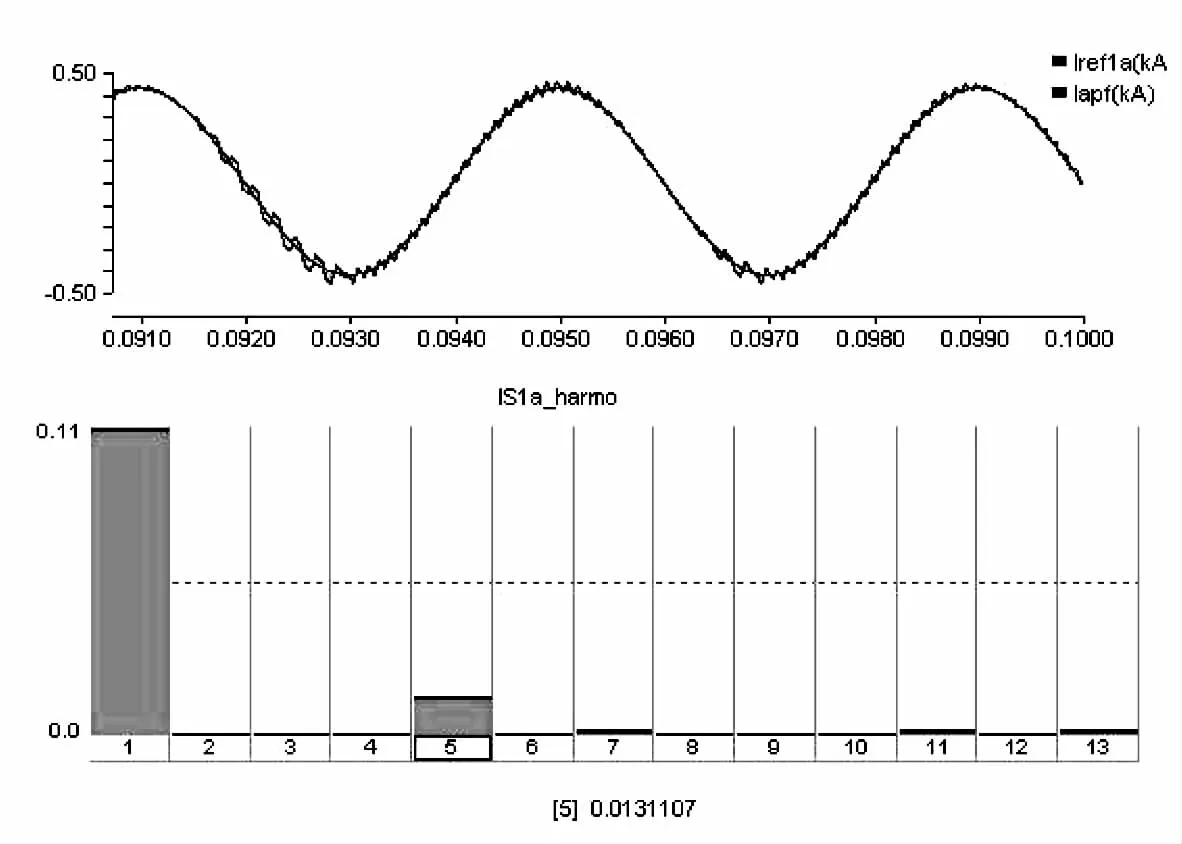
图9 PID控制的滤波效果
4 结论
试验结果表明,通过合理调节PID控制器比例系数、积分常数和微分常数,可使系统获得较高的稳态性能和较好的动态特性,是APF中可行的控制策略。但同时也发现它在滤除特定频次谐波的同时放大了其他频次的谐波电流,这在滤波中是不希望出现的,我们将进一步试验调节PID控制器的各项参数、或尝试其他的控制方式,以进一步提高其控制精度,得到更加理想的滤波效果。
[1]蒲如兰.论衡量供电系统电压质量的指标[J].电力系统及其自动化学报,2002,14(3):67-69.
[2]Rice DE.A detailed analysis of six-Pulse converter harmonic currents[J].IEEE Transactions on In dustry Application,1994,30(2):294-304.
[3]于晶荣.低压配电网有源电力滤波器关键技术研究[D].湖南大学,2009.
[4]王宝良,解大,李维成.并行结构的电力有源滤波器设计[J].东北电力技术,2006,27(1):4-8.
[5]孙扬声.自动控制理论(第二版)[M].北京:中国电力出版社,1993:182-217.
TM712
B
1671-9123(2017)03-0133-04
2017-06-26
河南省高等学校重点科研项目(15B470005)
吴萍(1982-),女,河南商丘人,三门峡职业技术学院电气工程学院讲师。
(责任编辑 卞建宁)
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
大电机技术(2021年5期)2021-11-04
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
电子制作(2018年14期)2018-08-21
通信电源技术(2018年3期)2018-06-26
火控雷达技术(2016年3期)2016-02-06
广西文学(2015年9期)2015-10-24
中国铁道科学(2014年6期)2014-06-21