3T1R并联机构结构降耦设计与运动学分析
2017-11-15 09:30沈惠平杨廷力邵国为
农业机械学报 2017年10期
沈惠平 张 震 杨廷力 邵国为
(常州大学现代机构学研究中心,常州 213016)
3T1R并联机构结构降耦设计与运动学分析
沈惠平 张 震 杨廷力 邵国为
(常州大学现代机构学研究中心,常州 213016)
根据基于方位特征(POC)的并联机构设计理论与方法,提出了一种结构简单、能实现三平移一转动的并联机构,拓扑结构分析后发现其耦合度k较大(k=2),其位置正解及动力学计算较复杂;为此,设计了结构降耦后的新机型,证明其耦合度k=1,其位置正解易用一维搜索法求出,并给出了基于序单开链法的该机构位置正解求解的一维搜索法及其数值解;同时,基于导出的机构位置反解公式,分析了动平台的工作空间及其转动能力,探讨了该机构发生3种奇异位形的条件。
并联机构; 方位特征; 耦合度; 结构降耦; 运动学分析; 一维搜索法
引言
国内外对实现SCARA型(三平移一转动,3T1R)输出运动的并联机器人进行了一些研究和应用开发[1-5]。国内对3T1R并联机构的理论研究较多,样机研制及其应用开发相对迟缓。2000年,赵铁石等[6]提出了一种4-URU型三平移一转动并联机器人;2001年金琼等[7]根据基于单开链的并联机构设计方法,提出了一类三平移一转动并联机器人,并申请了一组5个具有单动平台的三平移一转动并联机构专利[8],但未研制样机;黄田等[9]于2010年开发了具有2~3个动平台的四自由度三平移一转动的系列Cross-IV型高速搬运机器人;2012年刘辛军等[10]研制了具有一个动平台的X4型并联机构样机。
根据基于方位特征集(Position and orientation characteristics,POC)和序单开链单元(Single open chain,SOC)的并联机构拓扑结构设计理论和方法[11],作者团队系统综合了18种三平移一转动并联机构[12-15]。
本文首先对其中之一的三平移一转动并联机构进行POC集、自由度、耦合度3个主要拓扑结构特征的分析,发现其耦合度k较大(k=2);为此,对这一机构进行了结构降耦设计,使耦合度降低为1,但其基本功能(自由度和动平台输出运动)保持不变;采用基于序单开链法的位置正解求解原理,对降耦后的并联机构(k=1)建立一个仅含一个虚拟变量的位置约束方程,并采用一维搜索法求得其全部正解数值解;又通过求解机构的位置反解,对该机构进行工作空间、转动能力及奇异性分析。
1 3T1R并联机构及其拓扑特性分析
1.1 机构设计
本文提出的机构由动平台1、静平台0通过4条支链连接而成,如图1所示[16],其中,第I、III约束条支链包含5个转动副,其连接方式表示为Ri1∥Ri2∥Ri3⊥Ri4∥Ri5(i=1,3)(∥表示平行,⊥表示垂直,下同);第II、IV条为无约束支链,其连接方式表示为Rj1-Sj1-Sj2(j=2,4)。动平台1上转动副R15、R35的轴线和其法线相平行;静平台0上的转动副R11、R21、R31和R41为驱动副,设转动副R11与R31的轴线垂直,即R11⊥R31。
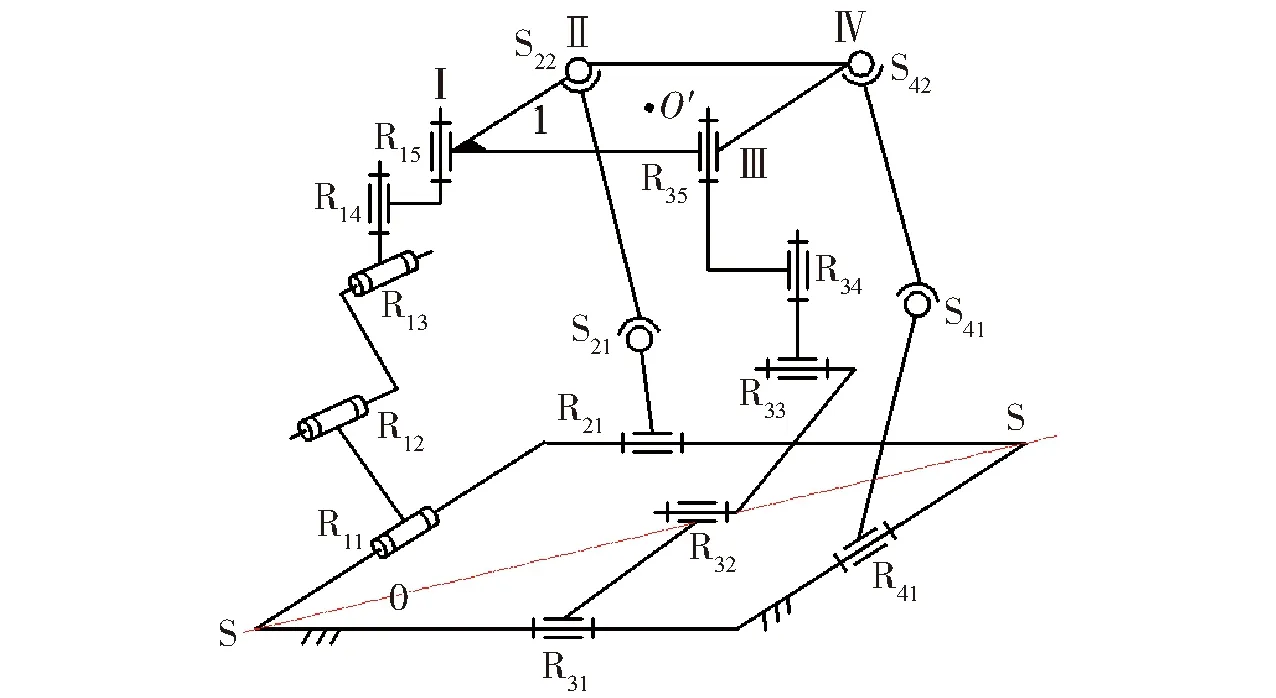
图1 3T1R原始并联机构Fig.1 Original 3T1R PM
该机构的特点是:①仅含两条约束支链(Ⅰ、Ⅲ支链),且为简单支链;所含运动副、构件少,制造、装配工艺性好。②机构仅关于静平台0的对角线SS对称。
1.2 3T1R机构的拓扑特性分析
1.2.1机构拓扑特性分析的理论基础
(1)机构的POC集
(1)
(2)
式中Mb——支链末端构件的POC集
MJi——第i个运动副(Joint)的POC集(末端构件上的同一个基点O′)
Msj——当支链含有子SOC串联时,第j个子SOC的POC集
MPa——机构动平台的POC集
Mbi——第i条支链末端的POC集
(2)自由度
并联机构自由度公式为
(3)
其中
(4)
v=m-n+1
式中F——机构自由度
fi——第i个运动副的自由度
m——运动副数n——构件数
v——独立回路数
ξLj——第j个回路的独立位移方程数
Mb(j+1)——第(j+1)条支链末端构件的POC集
(3)单开链的约束度
第j个单开链(SOCj)的约束度为
(5)
式中mj——第j个SOCj的运动副数
fi——第i个运动副自由度(不含局部自由度)
Ij——第j个SOCj的驱动副数
(4)耦合度的定义
独立回路为v的BKC(Basic kinematics chain)可分解为v个单开链SOC(Δj)(j=1,2,…,v),因此,BKC的耦合度k定义为
(6)
其物理意义是:耦合度反映了机构各独立回路运动变量之间的关联、依赖程度,也反映了机构运动学、动力学问题求解的复杂性,且已证明:k越大,拓扑结构的复杂度越高;对于k=0的机构,其每个回路的运动量都能独立求出,最终能得到位置正向解析解;若k>0,意味着机构每个回路的运动量不能独立求出,而需多个回路方程联立求解,且耦合度k恰为机构冗余回路(Δj>0)的虚拟变量数或约束回路(Δj<0)的运动约束方程数,可用k维搜索法求得其位置正解或动力学逆解的数值解。
1.2.23T1R机构的拓扑特性分析
1.2.2.1机构的POC集和自由度
(1)选定动平台1上任意一点O′为基点
(2)确定4条支链末端构件的POC集
由式(1)有

(3)确定第1个独立回路的位移方程数ξL1
① 第Ⅰ、Ⅲ条支链组成第1个回路,由式(4)有
② 第Ⅰ、Ⅲ条支链组成的子并联机构的DOF和POC,由式(3)有
由式(2)有
(4)确定第2个独立回路的位移方程数ξL2
①由第1子并联机构及第Ⅱ条支链组成第2个回路,由式(4)有
②第1子并联机构及第Ⅱ条支链组成的第2个子并联机构DOF和POC集,由式(3)有
由式(2)有
(5)确定第3个独立回路的位移方程数ξL3
由第2个回路及第Ⅳ条支链组成第3个回路,由式(4)有
(6)确定机构自由度
由式(3)有
(7)确定机构的POC集
由式(2)有
因此,动平台1具有3个移动和1个绕其法线方向的转动输出。
1.2.2.2机构的耦合度
由上已求得ξLi=6(i=1,2,3),因此由式(5)分别求得其约束度为

进一步,由式(6)有
由此可知,该机构尽管结构简单,但耦合度仍较大,为k=2,因此,该机构位置正解还较复杂,但可通过结构降耦设计,使其k降低为1,在保持机构的基本功能——POC和DOF不变的前提下,使机构的运动学正解和动力学分析方便求解。
2 3T1R降耦机构的设计
根据作者提出的机构结构降耦方法[17-18],将图1中的动平台1上的R15和R35重合,则成为如图2所示的降耦机构[19],即该降耦机构可视为由混合支链I及无约束支链Ⅱ、Ⅲ组成。
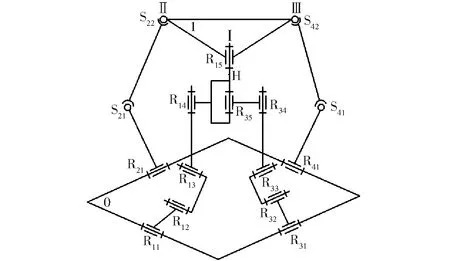
图2 3T1R并联机构的降耦设计Fig.2 Coupling-reducing design of 3T1R PM
混合支链I: HSOC1{-R11∥R12∥R13⊥R14∥R35∥R34⊥R33∥R32∥R31-},支链Ⅱ:SOC2{-R15-S22-S21-R21-},支链Ⅲ:SOC3{-R41-S41-S42-}。
现对该机构进行拓扑分析如下:
2.1 降耦机构的POC集和自由度
(1) 确定支路末端构件的POC集

(2)确定第1个独立回路的位移方程数ξL1
① 混合支链I构成第1个回路,由式(4)知
② 该子并联机构的DOF和POC集由式(2)、(3)有

(3)确定第2个独立回路独立位移方程数ξL2
①由混合支链Ⅰ、支链Ⅱ组成第2个回路,由式(4)有
② 该子并联机构DOF和POC集,由式(2)、(3)分别有

(4)确定第3个独立回路的位移方程数ξL3
由式(4)有
(5)确定机构自由度DOF
由式(3)有
(6)确定机构的POC集
由式(2)有
可见,降耦设计后,机构的自由度仍为F=4,动平台输出仍为三平移一转动。
2.2 降耦机构的耦合度
同理,已求得ξLi=6(i=1,2,3),因此,由式(5)得各回路的约束度分别为
显然,该机构只包含一个BKC,其耦合度为
由此可知,通过动平台1上运动副的复合,机构的基本功能(POC和DOF)都没变,但机构的耦合度已降低为1,因此,机构的位置正解可由基于序SOC的一维搜索法较易求得。
3 3T1R降耦机构的位置分析
3.1 位置正解分析
3.1.1坐标系建立及符号标注
机构位置分析求解模型如图3所示, 静平台0为边长2a的正方形,动平台1为直角边长为2m的等腰直角三角形,4个主动副R11、R21、R31、R41均位于各边中点。静坐标系OXYZ建立在静平台0的中心,且X轴平行于R31的轴线,Y轴平行于R11的轴线,Z轴由右手法则确定;而动坐标系Puvw位于动平台1的中心点P,u轴平行于R15S42边,v轴平行于R15S22边,w轴同样由右手法则确定。
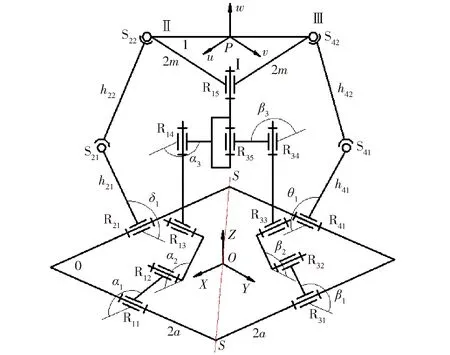
图3 3T1R降耦机构的位置分析模型Fig.3 Position analysis model of 3T1R coupling-reducing PM
为理解方便,将图3机构展开为平面图,如图4所示,其中,直线SS为正方形静平台0的对角线。

图4 3T1R降耦机构的俯视展开图Fig.4 Expanding top-view of 3T1R coupling-reducing PM
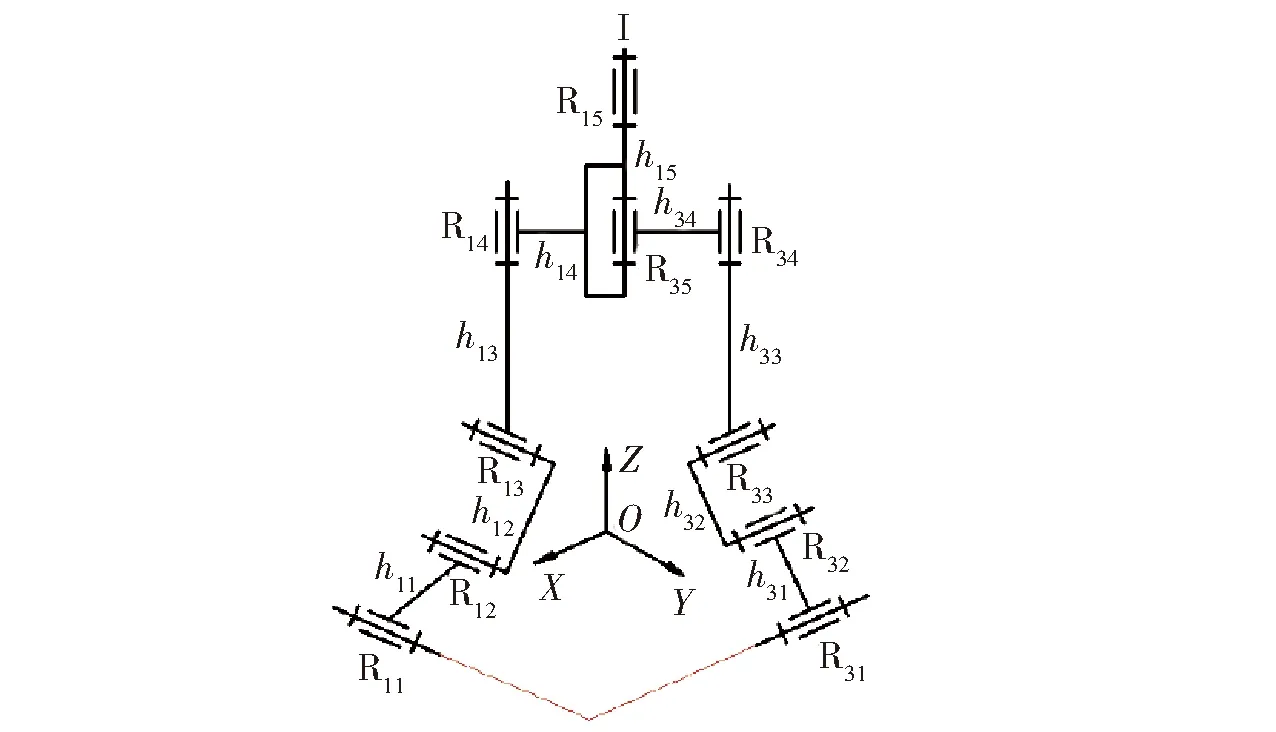
图5 混合支链结构Fig.5 Structure of hybrid branched chain
机构的主要结构参数为:混合支链Ⅰ中,如图5所示,hij表示2个转动副Rij、Ri,j+1之间的杆长 (i=1,3;j=1,2,3,4);如图3所示,αi表示转动副R1i的转角(i=1,2,3),βj表示转动副R3j的转角(j=1,2,3)。无约束支链Ⅱ、Ⅲ中(图3),hi1表示转动副Ri1与球副Si1之间的杆长,hi2表示球副Si1与球副Si2之间的杆长(i=2,4);δ1、θ1分别表示转动副R21、R41的转角。
动平台1绕Z轴方向的转角为γ,如图6所示。
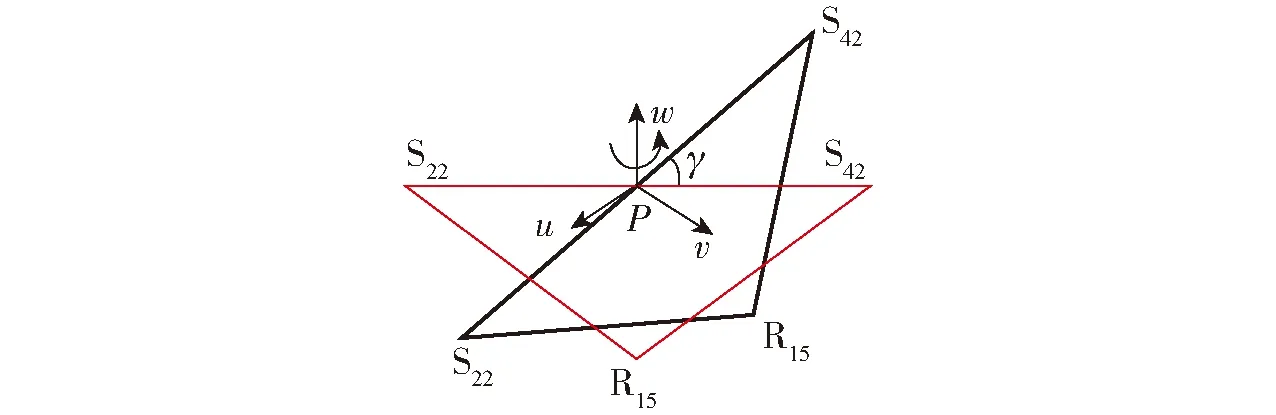
图6 姿态角γ的度量Fig.6 Measurement of angle γ
该机构位置正解可描述为:已知输入角α1、δ1、β1、θ1,求动平台1的位置P(x,y,z)及转角γ。
3.1.2基于序SOC的机构位置正解求解原理及算法
根据式(5),单开链的约束度有正值、零、负值3种形式,其物理意义是:
根据上述求解原理,进一步给出该机构基于序SOC的位置正解的求解算法,如下:


3.1.3求解Δ1>0的HSOC1上各运动副位置
由HSOC1中的分支链{-R11-R12-R13- R14-R35-R15-},可依次求得点R11、R12、R13、R14、R35、R15的坐标,再由矢量方程lOP=lOR15-lPR15求出P点的坐标为
(7)
同理,由HSOC1的另一条分支链{-R31-R32- R33-R34-R35-R15-},可依次求得点R31、R32、R33、R34、R35、R15的坐标,再由矢量方程lOP=lOR15-lPR15求出P点的坐标为
(8)
由式(7)、(8)可得
h12sinα2-h32sinβ2=t1
(9)
-h34sinβ3=t2+h14sinα3
(10)
-h34cosβ3=t3+h14cosα3
(11)
其中
t1=-h11sinα1-h13+h31sinβ1+h33
t2=-a-h31cosβ1-h32cosβ2
t3=a+h11cosα1+h12cosα2
从式(10)、(11)中消去β3,有
A1sinα3+B1cosα3+C1=0
令

(12)
解得

(13)
其中A1=2t2h14B1=2t3h14
因此,α3也是虚拟变量α2的函数。
3.1.4求解Δ2=0的SOC2上各运动副位置
由支链Ⅱ,得S21、S22的坐标分别为(0,-a+h21cosδ1,h21sinδ1)、(a+h11cosα1+h12cosα2+h14cosα3+2msinγ,h14sinα3-2mcosγ,h11sinα1+h12sinα2+h13+h15)。于是,由杆长约束条件lS21S22=h22,整理并化简有
A2sinγ+B2cosγ+C2=0
令

(14)
解得
(15)
其中A2=4m(a+h11cosα1+h12cosα2+h14cosα3)
B2=-4m(h14sinα3+a-h21cosδ1)
C2=(h14sinα3+a-h21cosδ1)2+4m2+(a+
h11cosα1+h12cosα2+h14cosα3)2+


3.1.5建立Δ3<0的SOC3上的目标函数
由支链Ⅲ,得S41、S42的坐标分别为(-a+h41cosθ1,0,h41sinθ1)、(a+h11cosα1+h12cosα2+h14cosα3-2mcosγ,h14sinα3-2msinγ,h11sinα1+h12sinα2+h13+h15)。同样,由杆长约束条件S41S42=h42,整理并化简得

(16)
为方便理解,上述计算过程如图7所示。

图7 降耦机构位置正解的流程Fig.7 Flow chart of forward position of coupling-reducing PM
3.2 位置反解分析
该机构位置反解可描述为:已知动平台1的位置P(x,y,z)及转角γ,求输入转角α1、β1、δ1、θ1。
3.2.1求主动副R11的输入角α1
由式(7)可知
则
(17)
由式(7)中的x、z坐标,可得
-h12cosα2=P0+h11cosα1
(18)
-h12sinα2=P1+h11sinα1
(19)
从式(18)、(19)中消去α2,有
P2sinα1+P3cosα1+P4=0
其中

令

(20)
解得
(21)
这样,由式(20)、(21)可直接求出输入角α1。
3.2.2求主动副R31的输入角β1
由式(8)可知
即
(22)
由式(8)中的y、z坐标,可得
h32cosβ2=P5-h31cosβ1
(23)
h32sinβ2=P6-h31sinβ1
(24)
从式(23)、(24)中消去β2,有
P7sinβ1+P8cosβ1+P9=0

令

(25)
解得
(26)
这样,由式(25)、(26),可直接求出输入角β1。
3.2.3求主动副R21的输入角δ1

由杆长约束条件lS21S22=h22,整理并化简可得
Q1sinδ1+Q2cosδ1+Q3=0
(27)
其中
Q1=-2zh21

令

(28)
解得

(29)
根据式(28)、(29),可直接求出输入角δ1。
3.2.4求主动副R41的输入角θ1

由杆长约束条件lS41S42=h42,并整理可得
Q4sinθ1+Q5cosθ1+Q6=0
(30)
其中
Q4=-2zh41

令

(31)
解得
(32)
因此,根据式(31)、(32),可直接求出输入角θ1。
由上可知,该机构存在24=16组反解。
3.3 位置正反解实例验算
3.3.1正解算例
设该并联机构的结构参数为(单位:cm):h11=20;h12=30;h13=5;h14=10;h15=5;h21=20;h22=40;h41=20;h42=40;h31=20;h32=30;h33=5;h34=10;a=30;m=10。
设4个主动输入角为:α1=116.927 6°;β1=86.151 4°;δ1=99.326 8°;θ1=89.844 6°。

表1 机构位姿正解数值Tab.1 Numerical forward solutions of PM
3.3.2逆解算例
将表1中正解第2组数据结果,代入式(20)、(21)、(25)、(26)、(28)、(29)、(31)、(32),可得16组实数反解,其中,一组反解为:α′1=116.926 4°;β′1=86.156 4°;δ′1=99.326 4°;θ′1=90.005 1°。
可见,与给定的4个输入角一致,从而验证了其正反解的正确性。
4 降耦机构的工作空间和转动能力分析
4.1 工作空间分析
工作空间是衡量并联机器人性能的一个重要指标,本文采用极限搜索法对该3T1R降耦机构的工作空间进行分析,即先设定该工作空间的搜索范围,基于导出的运动学逆解,查找该工作空间内所有满足杆长约束、运动副转角约束、连杆干涉约束的点;若其中的任一值超出了其允许值,则对应的点在工作空间外,表示机构此时的位姿达不到;反之,该点位于工作空间的边界。这些点所构成的三维立体图,即为该机构能够达到的工作空间。
机构的结构参数,已在3.3节中给出。为了找到空间中满足要求的点,先确定空间三维搜索范围:0≤z≤50,-π≤θ≤π, 0≤ρ≤50(θ、ρ分别为柱坐标系中搜索角度和搜索半径);约束条件:-π≤α1(β1,δ1,θ1)≤π;于是,通过Matlab软件编程,得到该并联机构工作空间的三维立体图及各截面图,分别如图8、图9所示。
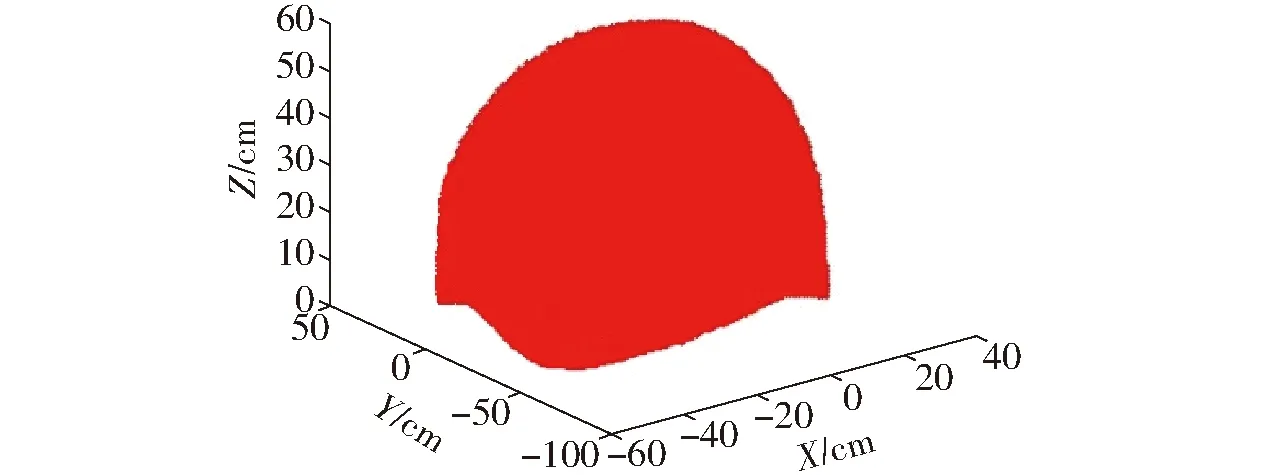
图8 降耦机构的三维工作空间Fig.8 Three-dimensional workspace of coupling-reducing PM
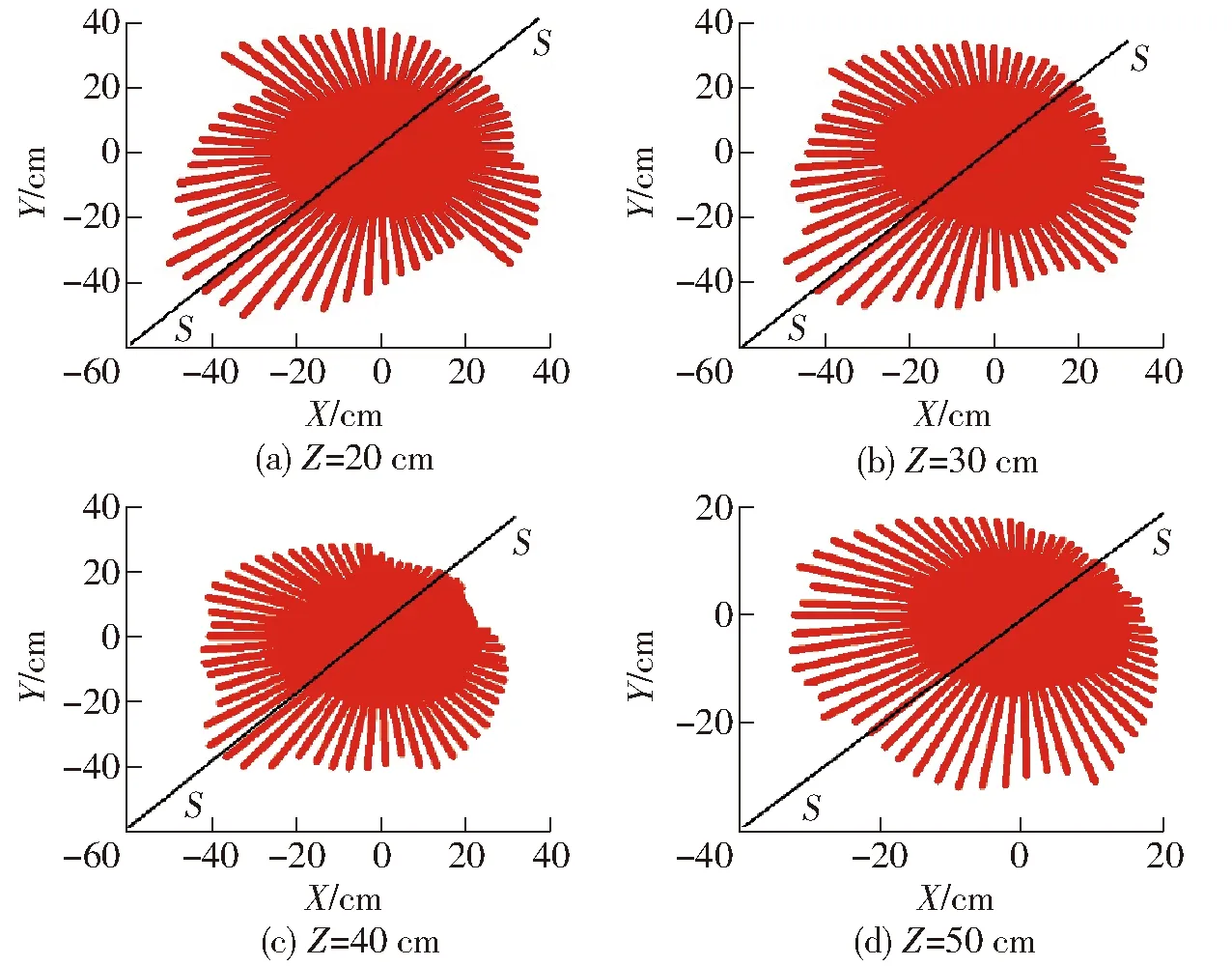
图9 工作空间的X-Y截面图Fig.9 X-Y cross-sectional views of workspace
从图9可看出:①该并联机构的工作空间连续,且对称于静平台0的对角线SS。②随着Z的增加,机构工作空间X-Y截面图形的面积逐渐减小,但图形更加规则。
4.2 转动能力分析
动平台转动能力即为末端执行器在工作区域内的转角范围,是衡量并联机构输出转动灵活性能的又一个重要指标。这里同样采用极限边界搜索法,基于导出的位置反解公式,通过固定高度Z处的X-Y截面来分析该机构动平台的转动能力,即通过改变搜索半径ρ以及搜索角度θ,分别计算动平台在此X-Y截面内转角的最大值(γmax)和最小值(γmin)。
现取高度Z=40 cm,分别计算该机构动平台在其X-Y截面上各点的转角最大值(γmax)、最小值(γmin)的分布,如图10所示。
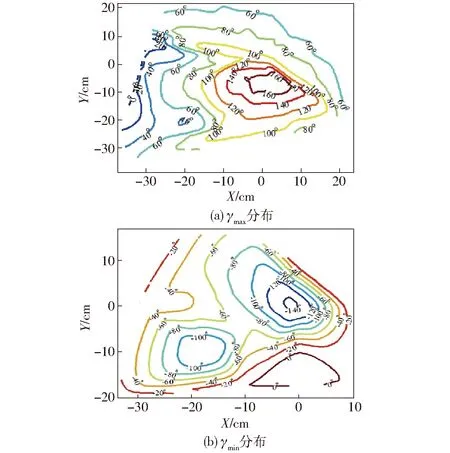
图10 该3T1R降耦机构的转动能力Fig.10 Rotation ability of 3T1R coupling-reducing PM
由图10可以看出,该并联机构的转角最大值的范围γmax∈[0°,160°],转角最小值的范围γmin∈[-140°,0°]。
5 3T1R降耦机构的奇异位形分析
3.2节已导出该机构的位置反解公式,对此直接求导,可获得机构动平台末端执行器的输出速度关于主动关节输入角速度的雅可比矩阵,当雅可比矩阵奇异时,并联机构的奇异位形出现。
5.1 雅可比矩阵求解

由混合支链Ⅰ中的左、右分支链,可求出点R14、R34的坐标分别为(0,a+h11cosα1+h12cosα2,h11sinα1+h12sinα2+h13);(b+h31cosβ1+h32cosβ2,0,h31sinβ1+h32sinβ2+h33)。
①由杆长条件lR14R35=h14,可得
(33)
其中

② 由杆长条件lR34R35=h34,可得
(34)
(2)由支链Ⅱ,已求得S21、S22坐标(3.1.4节)
由杆长条件lS21S22=h22可得
(35)
其中

(3)由支链Ⅲ,已求得S41、S42坐标(3.1.5节)
由杆长约束lS41S42=h42可得
(36)
其中

Jpv=Jqω
(37)
其中
5.2 奇异位形分析
当雅可比矩阵行列式值为零时,机构将出现奇异位形;即式(37)中,当Jp和Jq中任何1个或2个矩阵行列式为零,机构均会出现奇异位形,即有:逆向运动学奇异、正向运动学奇异及组合奇异3类。
(1)逆向运动学奇异
即det(Jq)=0,可得Jq矩阵行列式解的集合D为
D=D1∪D2∪D3∪D4
其中
D1={M2sinα1-M3cosα1=0}
(38)
D2={M4sinβ1-M6cosβ1=0}
(39)
D3={N2sinδ1-N3cosδ1=0}
(40)
D4={N4sinθ1-N6cosθ1=0}
(41)
对该机构而言,满足式(38)~(41)中的任意一个公式即发生该类奇异。这类奇异一般是指机构处于工作空间边界或者位置反解数目发生变化时的位形。
当式(38)或(39)成立时,杆R11R12与R12R13或杆R31R32与R32R33被拉直或重叠共线;杆R11R12与R12R13拉直共线的情形如图11a所示。
当式(40)或(41)成立时,杆R21S21与S21S22或杆R41S41与S41S42被拉直或重叠共线;杆R21S21与S21S22拉直共线的情形如图11b所示。
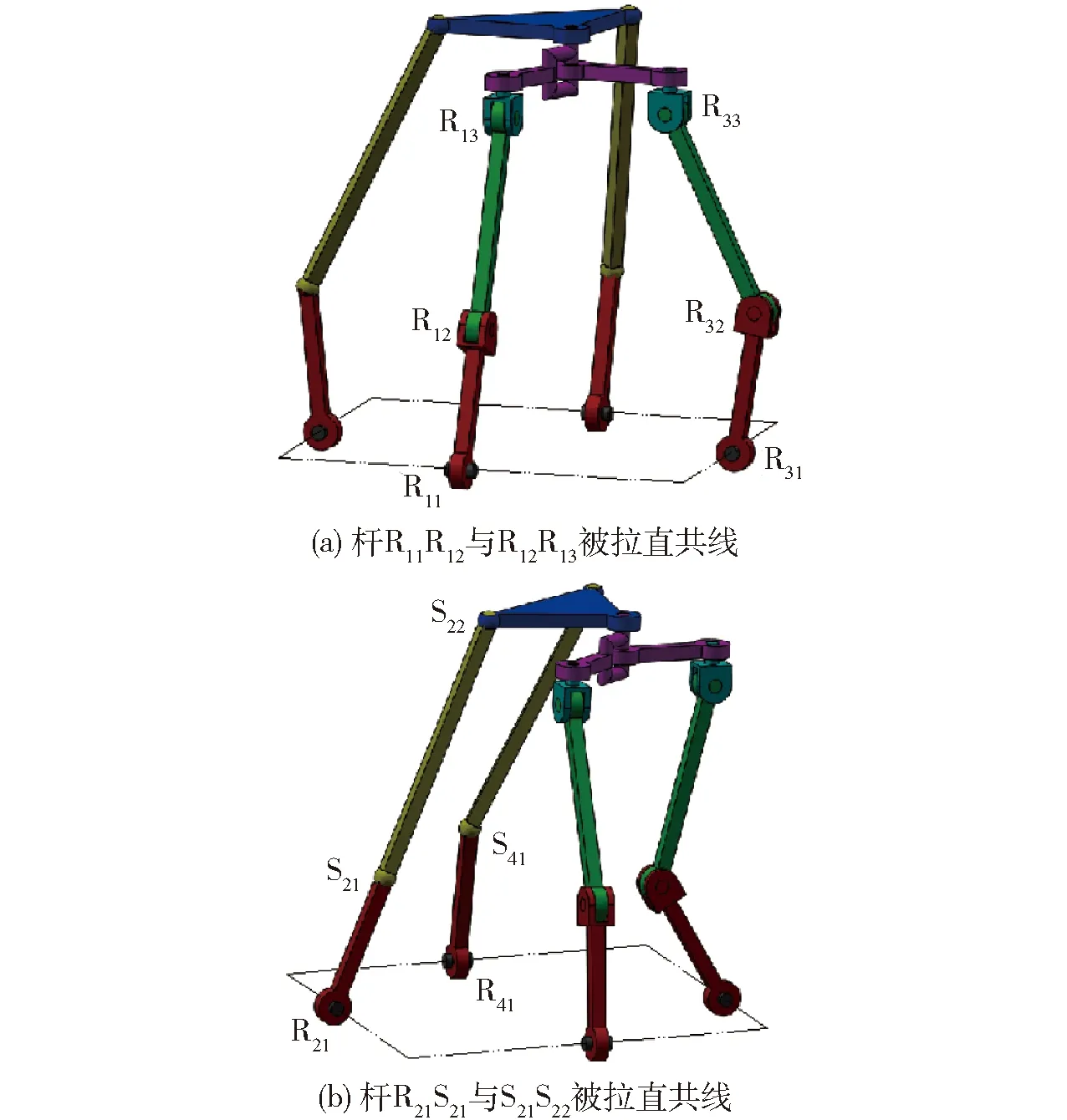
图11 3T1R并联机构的逆向运动学奇异位形Fig.11 Inverse kinematics singularity of 3T1R PM
这样,通过控制驱动副转角,可使机构的工作位置尽量远离奇异位形点。
(2)正向运动学奇异
即det(Jp)=0,从数学上求解该方程,并找出所有的正向奇异位形点较为困难,但可用解析几何法能较为直观地找出奇异位形点。
具体为,将矩阵Jp看作4个行向量,如式(42)所示,可发现矩阵Jp各行向量,分别对应从动R14R35、R34R35、S21S22、S41S42在定坐标系中的空间矢量。当发生该类奇异位形时,尽管驱动杆被锁定,机构的动平台也将具有一定自由度,此时,机构将失去刚度,无法承受任何承载。
(42)
由矢量的几何分析可知,当e1、e2两矢量平行,及e3、e4两矢量平行并与动平台1共面时,该机构出现正向奇异位形,此时,从动杆R14R35与R34R35平行;从动杆S21S22与S41S42平行,并与动平台1共面。
这种奇异位形可通过控制驱动副转角,来避免发生。
(3)组合奇异
即det(Jp)=0且det(Jq)=0。这种奇异位形只有当上述2种奇异同时发生时才会产生。此时,杆R11R12与R12R13被拉直共线,从动杆R14R35与R34R35平行,从动杆S21S22与S41S42平行。当机构处于该奇异位形时,机构将失去自由度,从而失去原有的运动特性。
6 结论
(1)运用基于POC和SOC的并联机构拓扑结构设计方法,通过并联机构拓扑结构降耦设计,可降低并联机构的耦合度,可设计基本功能(POC和DOF)不变的低耦合度并联机构,从而使其位置正解求解大大简化。
(2)3T1R降耦机构,动平台结构更简单,还具有较好的对称性;采用基于序单开链法的位置正解求解原理,仅需建立一个含一个虚拟变量的位置约束方程,即可采用一维搜索法求得其全部正解数值解。
(3)基于位置反解,分别得到了3T1R降耦机构的工作空间和转动能力,表明该机构工作空间规则连续,转动能力大;同时还得到了该机构发生奇异位形的条件。
1 ClAVEL R.Device for the movement and positioning of an element in space: US,4976582A[P].1990-12-11.
2 ABB.IRB 360 flexpicker[EB/OL].[2015-05-06].http:∥www.new.abb.com/products/robotics/industrials-robots/irb-360.
3 PIERROT F,COMPANY O.H4:a new family of 4-dof parallel robots[C]∥1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,1999:508-513.
4 KRUT S,COMPANY O,BENOIT M,et al.I4:a new parallel mechanism for SCARA motions[C]∥Proceedings of the IEEE International Conference on Robotics and Automation,2003:1875-1880.
5 NABAT V,COMPANY O,KRUT S,et al.Par4:very high speed parallel robot for pick-and-place[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,2005:1202-1207.
6 赵铁石,黄真.欠秩空间并联机器人输入选取的理论和应用[J].机械工程学报,2000,36(10):81-85.
ZHAO Tieshi,HUANG Zhen.Theory and application of selecting actuating components of spatial parallel mechanisms [J].Chinese Journal of Mechanical Engineering,2000,36(10):81-85.(in Chinese)
7 金琼,杨廷力,刘安心,等.基于单开链单元的三平移一转动并联机器人机构型综合及机构分类[J].中国机械工程,2001,12(9):1038-1043.
JIN Qiong,YANG Tingli,LIU Anxin,et al. Kinematics analysis of a parallel pneumatic and hydraulic linkage based on singleopened-chain[J].China Mechanical Engineering,2001,12(9): 1038-1043.(in Chinese)
8 杨廷力,金琼,罗玉峰,等.用于虚轴机床与机器人等的一类(三平移一转动)并联机构:中国,200310106012.4 [P].2004-09-15.
YANG Tingli,JIN Qiong,LUO Yufeng,et al.A class of 3T1R parallel mechanisms used for virtual axis machine tools and robots:CN,200310106012.4 [P].2004-09-15.(in Chinese)
9 黄田,刘海涛,李曚.五自由度机器人:中国,200510014459.8[P].2005-12-21.
HUANG Tian,LIU Haitao,LI Meng.The robot with five degree of freedom:CN, 200510014459.8[P].2005-12-21.(in Chinese)
10 刘辛军,谢福贵,王立平,等.一种可实现SCARA运动的四自由度单动平台并联机构:中国,201210435375.1[P].2012-02-03.
LIU Xinjun,XIE Fugui,WANG Liping,et al.A four freedom of degree parallel mechanism with single moving platform which can achieve scara move:CN,201210435375.1[P].2012-02-03.(in Chinese)
11 杨廷力,刘安心,罗玉峰,等.机器人机构拓扑结构设计[M].北京:科学出版社,2012.
12 沈惠平,杨廷力,邵国伟,等.一种三平移一转动并联机构机械手:中国,201510650394.X[P].2015-12-09.
SHEN Huiping,YANG Tingli,SHAO Guowei,et al.Three translations and one rotation mechanism manipulator:CN,201510650394.X[P].2015-12-09.(in Chinese)
13 沈惠平,杨廷力,李云峰,等.一种三平移一转动并联机器人抓放器:中国,201510648948.2[P].2015-10-09
SHEN Huiping,YANG Tingli,LI Yunfeng,et al.Three translations and one rotation parallel robot catcher:CN,201510648948.2[P].2015-10-09.(in Chinese)14 沈惠平,杨廷力,朱伟,等.一种三平移一转动并联机器人平台:中国,201510566840.9[P].2015-12-09.
SHEN Huiping,YANG Tingli,ZHU Wei,et al.A parallel robot platform with three translations and one rotation:CN, 201510566840.9[P].2015-12-09.(in Chinese)
15 沈惠平,杨廷力,朱小蓉,等.一种三平移一转动并联机器人:中国,201510564382.5[P].2015-12-09.
SHEN Huiping,YANG Tingli,ZHU Xiaorong,et al.Three translations and one rotation parallel robot:CN,201510564382.5[P].2015-12-09.(in Chinese)
16 沈惠平,邵国为,朱小蓉,等.基于POC法的多环耦合并联机构拓扑特征分析[J/OL].农业机械学报,2016,47(4):349-354.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160446&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.04.046
SHEN Huiping,SHAO Guowei,ZHU Xiaorong,et al.POC method based topology characteristic analysis of multi-loop coupled mechanisms[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(4):349-354.(in Chinese)
17 沈惠平,朱小蓉,尹洪波,等.并联机构的结构降耦原理及其设计方法[J].机械工程学报,2016,52(23):102-113.
SHEN Huiping,ZHU Xiaorong,YIN Hongbo,et al.Study on the principle and design method for structure coupling-reducing of parallel mechanisms[J].Journal of Mechanical Engineering,2016,52(23):102-113.(in Chinese)
18 SHEN Huiping,YANG Liangjie,MENG Qingmei,et al.Topological structure coupling-reducing of parallel mechanisms[C]∥2015 IFToMM World Congress,2015:OS13-120.
19 沈惠平,朱伟,曾氢菲,等.一种低耦合度三运动副动平台的三平移一转动并联机器人操作手:中国,201610141778.3[P].2016-06-08.
SHEN Huiping,ZHU Wei,ZENG Qingfei,et al.A low coupling degree three translation and one rotation parallel robot device with three joint moving platform:CN,201610141778.3[P].2016-06-08.(in Chinese)
20 朱小蓉,宋月月,孙晨,等.2RRUR-2RSS并联机构结构特性与运动学分析[J/OL].农业机械学报,2016,47(12):408-415.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161252&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.12.052.
ZHU Xiaorong,SONG Yueyue,SUN Chen,et al.Structural characteristics and kinematic analysis for novel 2RRUR-2RSS parallel mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):408-415.(in Chinese)
StructureCoupling-reducingDesignandKinematicsAnalysisof3T1RParallelMechanism
SHEN Huiping ZHANG Zhen YANG Tingli SHAO Guowei
(ResearchCenterforAdvancedMechanismTheory,UniversityofChangzhou,Changzhou213016,Chian)
There is a wide range of industrial applications for the 4-DOF parallel mechanism which can achieve SCARA type output motion (i.e., three translations and one rotation).However, due to the complex topological structures, the research and development of its new model are still relatively few.Firstly, according to the parallel mechanism design theory and method based on the orientation characteristic (POC), a SCARA type parallel mechanism whose structure was simple was proposed.Because the coupling degree was 2, positive solution of position and dynamics calculation of the parallel mechanism were very complex.So the new model after structure coupling-reducing (k=1) was given, its positive solutions can be easily solved by one-dimensional search method.Then the three main topological characteristics of POC set, degree of freedom and the coupling degree were respectively analyzed.The kinematics analysis of the new model whose coupling degree was one after structure coupling-reducing was given, and the solution algorithm for the forward position of this parallel mechanism was established.This method can obtain all the numerical solutions of the forward position by using one-dimensional searching method, and can verify the correctness of the forward position by the derived calculation formula of the inverse position.Finally, based on the inverse position of the mechanism, the working space of this parallel mechanism was obtained and the singularity of the mechanism was discussed, which provided a theoretical foundation for the prototype design and application of this mechanism.
parallel mechanism; orientation characteristic; coupling degree; structure coupling-reducing; kinematics analysis; one-dimensional searching method
10.6041/j.issn.1000-1298.2017.10.049
TH112
A
1000-1298(2017)10-0380-10
2017-01-17
2017-02-18
国家自然科学基金项目(51475050、51375062)和江苏省重点研发计划项目(BE2015043)
沈惠平(1965—),男,教授,博士生导师,主要从事机构学和并联机构研究,E-mail:shp65@126.com
猜你喜欢
防爆电机(2022年1期)2022-02-16
农业机械学报(2021年10期)2021-11-09
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
时代金融(2016年29期)2016-12-05
商场现代化(2016年1期)2016-03-18
海军航空大学学报(2015年1期)2015-11-11
中国人口·资源与环境(2015年1期)2015-01-13
北京航空航天大学学报(2014年1期)2014-12-19