飞机蒙皮自动制孔中夹紧孔布置方法研究
2017-11-15 02:18韩志仁刘顺涛郭喜锋
沈阳航空航天大学学报 2017年5期
韩志仁,孙 浩,刘顺涛,郭喜锋,贾 琛
(1.沈阳航空航天大学 a.航空制造工艺数字化国防重点学科实验室,b.航空航天工程学部(院),沈阳 110136; 2.成都飞机工业集团有限责任公司,部装二厂 成都 610092)
飞机蒙皮自动制孔中夹紧孔布置方法研究
韩志仁1a,1b,孙 浩1b,刘顺涛2,郭喜锋2,贾 琛1b
(1.沈阳航空航天大学 a.航空制造工艺数字化国防重点学科实验室,b.航空航天工程学部(院),沈阳 110136; 2.成都飞机工业集团有限责任公司,部装二厂 成都 610092)
飞机装配中的自动制孔工艺设计包括基准设计、夹紧孔设计和自动制孔设计,为了在保证自动制孔要求的前提下快速自动实现夹紧孔设计,提出了保证夹紧孔最大间距和自动制孔基本要求的夹紧孔设计算法,给出了具体的实施方法,开发了夹紧孔设计的原型模块,并进行了验证。该方法对于提高夹紧孔设计的效率、保证自动制孔的准确性和稳定性具有重要意义。
自动制孔;夹紧孔;蒙皮;CATIA
蒙皮制孔是飞机装配过程中的关键环节,在飞机蒙皮壁板装配、飞机部件装配中采用自动制孔技术,以提高飞机制造的数字化水平和生产效率[1-9]。在飞机制造的过程中自动制孔技术的研究目前主要集中在自动制孔设备的研制[2,4]、制孔法矢的自动找正[1,8]、自动离线编程技术[3]等方面。北京航空航天大学机器人研究所与沈阳飞机工业集团联合研制的飞机部件级机器人制孔系统,该系统能够完成大型钛合金、铝合金以及叠层飞机零部件的自动制孔[2];北京航空制造工程研究所自行研发的柔性导轨自动制孔设备,通过长时间的调试和大量工艺试验,目前该设备在定位精度和制孔质量方面已达到实用要求[9];浙江大学研制了一套双机器人协同自动钻铆系统[10],该系统的装配对象为大型飞机机身壁板的蒙皮、长桁、钣金框以及用来连接钣金框与蒙皮的补偿角片。国外,Electroimpact 与空客英国公司联合开发了一种机器人柔性装配系统,用于机翼壁板与骨架的装配,该系统具备探测壁板(厚度),孔检测等检测功能[11];德国宝捷研制的用于飞机货舱门结构的自动钻铆系统,能够实现对临时铆钉、孔和边缘、蒙皮定位、锪窝深度和孔厚度的检测等[12]。但目前的研究与应用在自动制孔工艺设计方面较少,特别是自动制孔工艺设计中夹紧孔布置方法未见报道。
自动制孔工艺设计是自动制孔技术的重要组成部分,包括制孔基准设计、夹紧孔设计、自动制孔设计。自动制孔工艺设计不仅包括孔的位置,还包括制孔的夹层厚度、材料顺序、夹紧孔的布置等工艺信息。而夹紧孔的合理布置是保证自动制孔工程中蒙皮有效约束的重要因素[13]。
1 蒙皮夹紧孔布置的影响因素
飞机结构中与蒙皮连接的件主要是梁、框、肋和桁条的外缘条[14],典型连接孔布置图1所示。在自动制孔前,蒙皮首先要根据预先制作好的基准孔进行定位,而后再手工制作夹紧孔,约束蒙皮,保证自动制孔时蒙皮的稳定性[15],而夹紧孔之间的距离为影响夹紧孔布置的重要因素。夹紧孔的布置间距取决于蒙皮厚度、材料和支撑件(包括梁、框、肋、桁条)的截面尺寸、形状和材料等因素。一般来说,整个蒙皮件的稳定性越好(蒙皮厚度越大,蒙皮材料力学性能越好,蒙皮件的设计结构越合理),这个间距参数越大,夹紧孔的布置间距就越大;反之,夹紧孔的布置间距就越小。
在实际生产活动中,夹紧孔的距离参数需要根据蒙皮和支撑件组成结构的稳定性实验进行确定[16],也可以采用经验方法给出。本文中不对具体的夹紧孔间距进行研究,只研究在已知的夹紧孔间距下的夹紧孔的布置问题。如何在保证两个相邻夹紧孔的间距参数满足要求的情况下,均匀布置夹紧孔,保证夹紧孔的数量最少,提高制孔和装配效率是自动制孔工艺设计重点内容[17]。飞机部件装配中,随着自动制孔工艺使用越来越普遍[18],需要提出一种夹紧孔布置算法,满足上述要求。
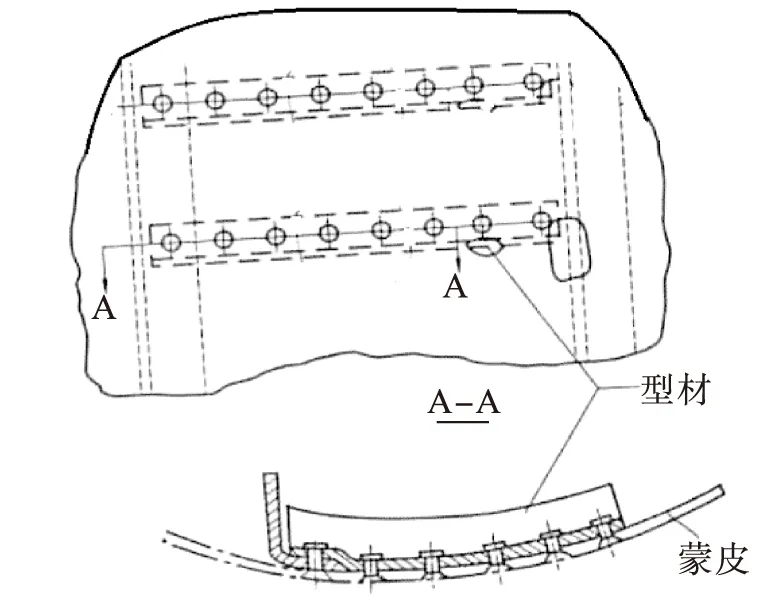
图1 蒙皮连接孔典型布置示意图
2 蒙皮夹紧孔的布置的方法
具体的蒙皮夹紧孔间距是根据钣金件的材料和厚度来决定的,因此本文不讨论具体的夹紧孔间距的数值范围,默认为一个范围k1(mm)~k2(mm)(k1≤k2)。
夹紧孔布置方法是将三维蒙皮展成二维平面,并将制孔点位展开到二维平面内,将三维问题转化为二维问题进行处理。在二维平面上,用孔的中心点来表示孔。夹紧孔布置算法就可描述为:在给定的一个点集中,确定一个起始点,根据这个点,将所有间距符合k1(mm)~k2(mm)的点筛选出来。
通常,选择夹紧孔为人工选取,效率低,准确率不高。甚至在夹紧孔数量较多时,出现重复或者漏掉夹紧孔的情况,影响夹紧效果,给自动制孔加工带来隐患。为此,提出一种新的夹紧孔布置算法,旨在更加方便快捷准确地选择出符合要求的夹紧孔。
在二维平面中,将孔抽象为一个均匀分布的点集A={(xi,yi)},如图2所示,其中,相邻且距离最近的两个点的距离为l0(mm)。从这些点中,选取出间距在k1(mm)~k2(mm)(k1≤k2)之间的所有点作为夹紧孔的法矢位置。
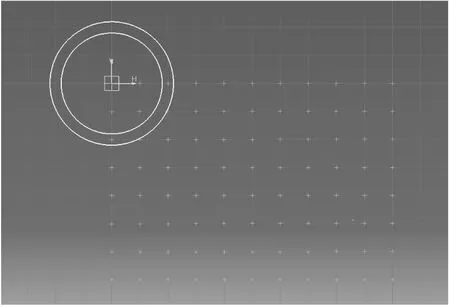
图2 二维平面均匀点集
在点集中选择符合间距条件的点时,每次选择,都要确定一个基准,即初始点{(x0,y0)}。如在第一次迭代选择时,我们必须要指定一个起始点作为本次迭代计算距离的基准。而在第二次迭代选择时,基准就会变为第一次选择出来符合条件的点,而距离小于间距最小值的点一定不是符合要求的点,所以将其排除。
首先,选取某一边界上的点{(x0,y0)}作为夹紧孔选择的起始点,并且将此点作为第一个夹紧孔的法矢位置。然后开始做两个圆r1和圆r2,半径分别为k1(mm)和k2(mm),将圆r1内的点(不包括圆r1上的点)全部排除或删除,因为这些点一定不能满足夹紧孔要求。这些被排除的点可表示为

将在圆r1和圆r2之间圆环部分的点(包括圆r1和圆r2上的点),作为挑选出的符合间距要求的夹紧孔的法矢位置的点。这些点可表示为

将剩余这些点记录下来,作为下一次迭代画圆的圆心。而圆之外的点,通过后面的迭代继续判断,图3为算法流程图。
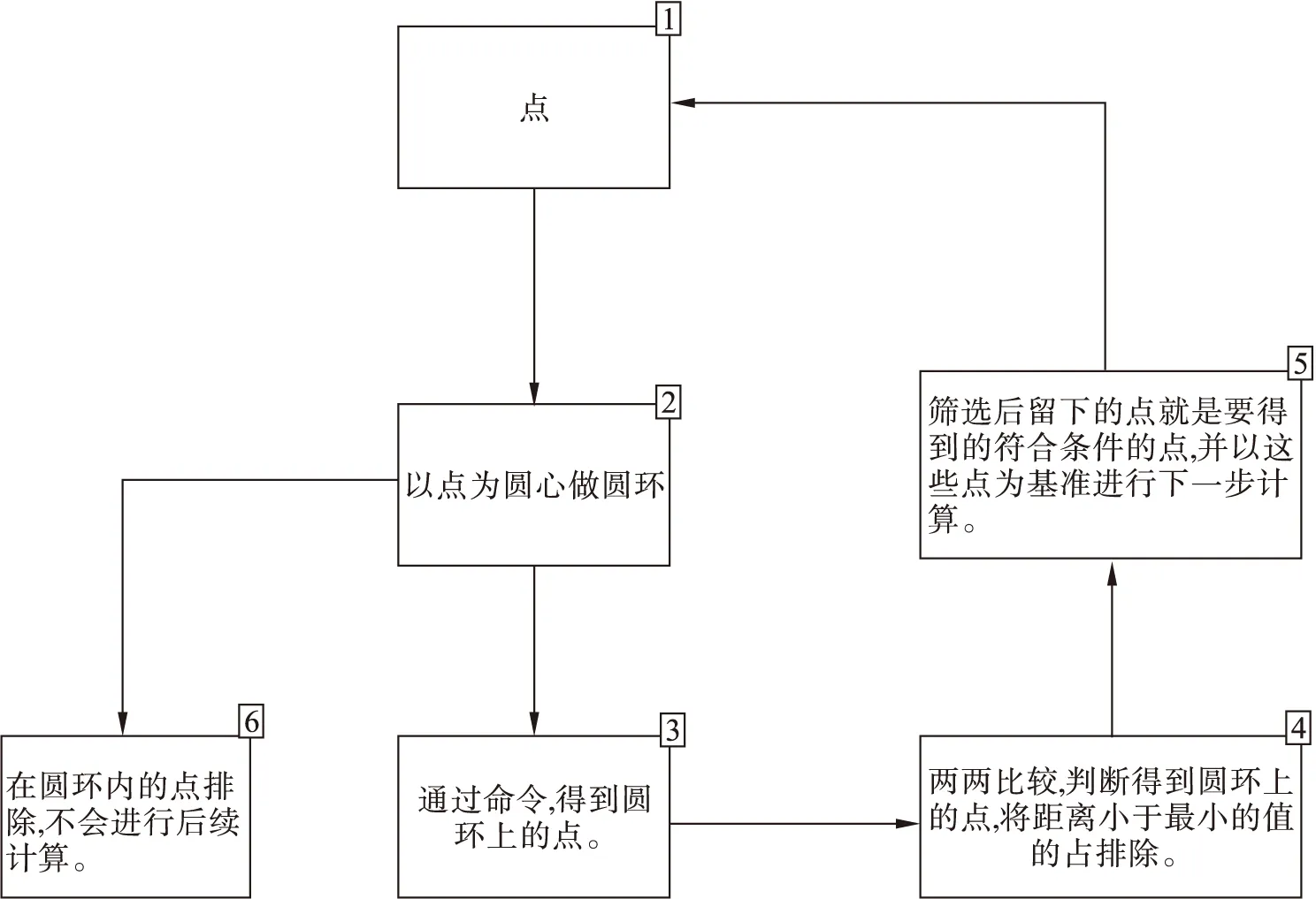
图3 算法流程图
之后将点集中符合间距要求的点全部挑选出来,并且将其表示为B={(xj,yj)},点集B就是我们要得到的夹紧孔点集。
再将算法实例化,制作成一个选取夹紧孔的CATIA插件。一个平面蒙皮的连接孔分布如图3所示,以右上角边界点为起始点,采用夹紧孔布置算法进行夹紧孔的筛选,得到结果如图4所示。
3 模块开发介绍和应用实例
在实际生产活动中,蒙皮件绝大多数为一个三维空间曲面,蒙皮件上的孔的位置是三维空间的。因此,首先利用三维软件(CATIA)将三维的机身蒙皮件展开为二维平面,并将三维蒙皮件上的孔一一对应到展开的二维蒙皮件平面中,利用夹紧孔布置算法,实现夹紧孔的自动拾取。
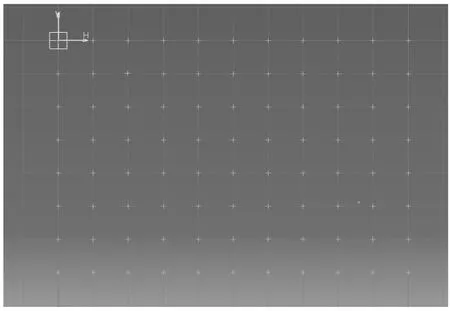
图4 筛选前图
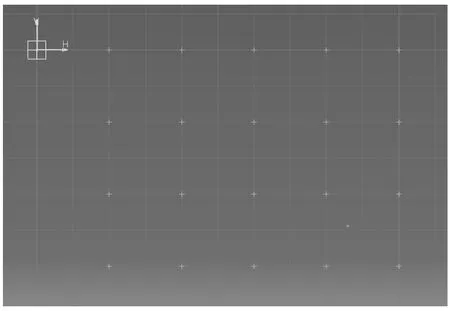
图5 筛选后效果
在插件开发中,拾取蒙皮件所在平面作为一个面实例存入一个Plane变量,然后将选取的起始点存入一个Point类型的数组中,以起始点为基准,利用夹紧孔布置算法,即在这个Plane平面上,以基准点为圆心,以夹紧孔间距范围为半径做一个圆环,求交运算得到圆环上的点,将这些点作为夹紧孔存入之前的Point数组。并将得到的点作为下一次运算的基准点,以此类推。得到的这个数组就是选择出的夹紧孔数组,可以方便地批量对这些点进行操作。具体步骤如下。
首先,打开一个某型号飞机机身蒙皮的Product文件,如图6所示。将图6中箭头指出的蒙皮件作为下一步选择夹紧孔的蒙皮件,即从Product文件中选择其中一个Part零件。将选择的Part蒙皮进行展开,并将蒙皮上的点按几何关系转化到展开图中,得到的展开图如图7所示。
展开后的蒙皮就可以利用夹紧孔布置算法,进行夹紧孔的选取。因为此蒙皮件上的点集不是均匀分布,大致分为4块点集区域和边界周围的点集,而每个区域之间的距离已经大于要求的最大间距k2(mm),形成的这个区域称之为“断裂带”,如图7所示。“断裂带”的存在会严重影响夹紧孔的拾取效果,使得选取夹紧孔不全,不准确。因此需要将整个蒙皮件上的点集分成5部分,分别对每个部分进行夹紧孔的选取。
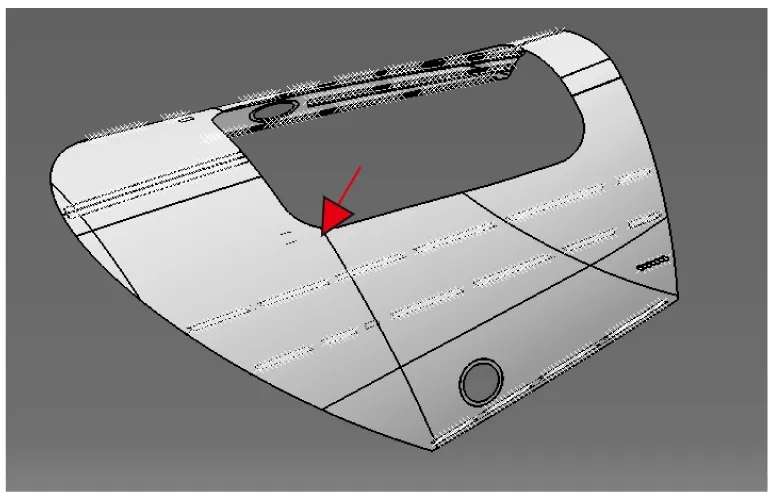
图6 某型飞机机身蒙皮件
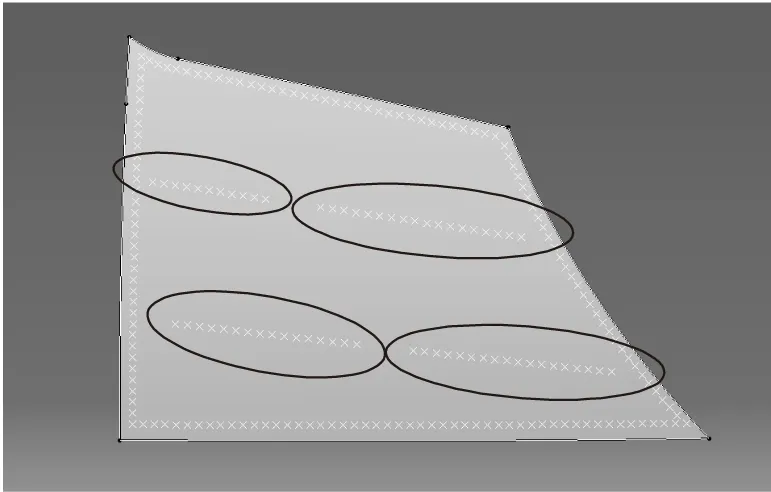
图7 蒙皮展开后效果
在“蒙皮平面”拾取框中选择蒙皮展开后形成的平面做为二维点集的基准平面。在“起始点”拾取框中选择5个顶点。如图8所示。拾取完成后,点击“确定”,即可得到二维平面上符合条件的夹紧孔,如图9所示。
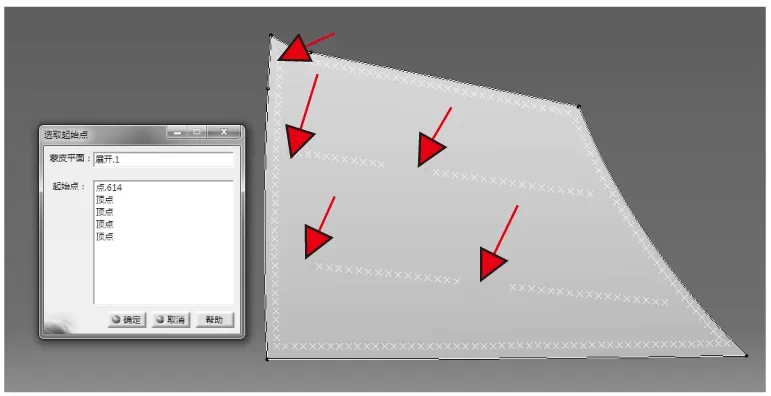
图8 选取起始点
在结构树上,每个点在展开前和展开后都有唯一编号,如图6、图7所示。可根据结构树上展开前后的编号来对应得到选取的夹紧孔在原蒙皮件上的位置。插件将选取出的夹紧孔对应到蒙皮件上,将其变为其它颜色以示区分,对应后的效果如图10所示。
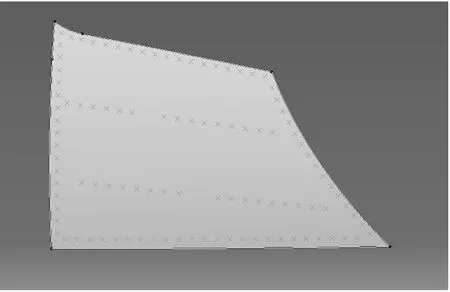
图9 二维平面上的夹紧孔
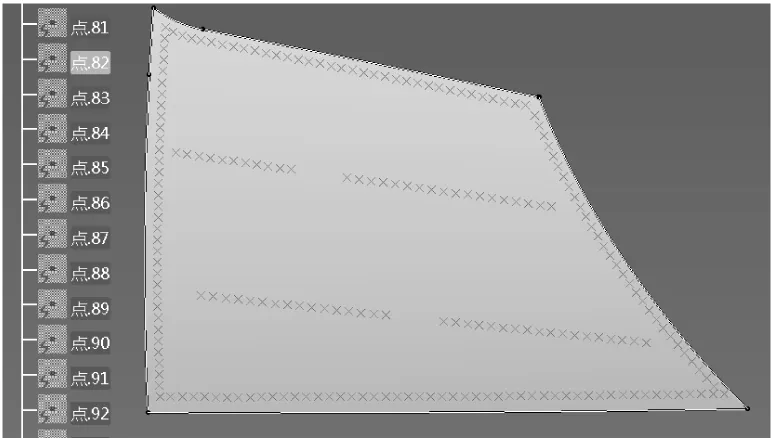
图10 蒙皮上的夹紧孔
4 结论
基于飞机蒙皮自动制孔工艺设计技术研究,结合本文提出的飞机蒙皮自动制孔中夹紧孔布置方法,以CAA/CATIA为平台,开发了夹紧孔布置软件,并通过了飞机蒙皮数字模型的验证。软件选择出的夹紧孔符合工艺设计规范,布置合理。夹紧孔布置软件减少了人工进行夹紧孔的布置计算,降低了人为出错的可能性,适应了无图纸化制造的趋势,提升了飞机数字化制造的水平,提高了自动制孔工艺设计的效率。
[1] 王增翠,秦现生,白晶,等.飞机壁板自动制孔法向测量算法研究[J].机械设计与制造,2014 (6):160-163.
[2] 姚艳彬,毕树生,员俊峰,等.飞机部件机器人自动制孔控制系统设计与分析[J].中国机械工程,2016,21(17):2021-2024.
[3] 梁雪梅,侯志霞,孙丽宏,等.飞机装配自动制孔过程仿真数据生成方法及应用[J].航空制造技术,2015(21):59-61.
[4] 黄大兴,王 珉,陈文亮,等.飞机装配自主移动式自动制孔系统机构设计[J].南京航空航天大学学报,2014,44(s):23-26.
[5] 刘军.机器人自动制孔技术在飞机装配中的应用[J].航空制造技术,2014(17):104-107.
[6] 张辉,郭洪杰,王巍,等.机器人自动制孔系统钻削工艺参数优化[J].航空制造技术,2015(21):100-102.
[7] 席志成,杨宏安,夏常凯,等.基于机器人的飞机部件自动制孔设备控制系统设计研究[J].机械制造,2013,52(595):61-64.
[8] 杨小丹,李树军,魏海涛,等.基于视觉检测的机器人自动制孔设备基准找正方法的研究[J].机械制造,2013,51(591):57-59.
[9] 侯志霞,刘建东,薛贵军,等.柔性导轨自动制孔设备控制技术,航空制造技术[J].2009(24):58-60.
[10]李菡.基于双机器人协同的自动钻铆终端器及其自动供钉装置的设计与研究[D].杭州:浙江大学,2010.
[11]RUSSELL D V,KEVIN S,FEIKERT E,et al.ONCE(One Sided Cell End Effector) Robotic Drilling System[J].Automated fastening conference & exposition,2002(1):2626.
[12]邓锋.采用标准关节机器人系统对飞机货舱门结构的自动钻铆[J].航空制造技术,2010(19):32-35.
[13]杜宝瑞,冯子明,姚艳彬,等.用于飞机部件自动制孔的机器人制孔系统[J].航空制造技术,2010(2):47-50.
[14]陈文俊,周桂宇,赵鲁春.飞机桁条-蒙皮连接结构的接触应力研究[J].机械研究与应用,2015(4):102-105.
[15]刘顺涛,陈雪梅,郭喜锋,等.飞机蒙皮自动制孔工艺设计研究[J].制造业自动化,2017(4):87-90.
[16]韩志仁,张浩,汪建东,等.基于CATIA/CAA飞机蒙皮边缘连接孔最小边距快速检测方法[J].航空制造技术,2017(Z1):70-73+78.
[17]张长念.自动化制孔机床控制系统设计中的关键技术研究[D].长少:湖南大学,2016.
[18]郭文杰.飞机自动制孔工艺设计及路径规划[D].沈阳:沈阳航空航天大学,2016.
Studyonclampingholearrangementinautomaticfittingofairplanes
HAN Zhi-ren1a,1b,SUN Hao1b,LIU Shun-tao2,GUO Xi-feng2,JIA Chen1b
(1.a.National Key Discipline Laboratory of Aeronautical Manufacturing Technology Digitization,b.Faculty of Aerospace Engineering,Shenyang Aerospace University,Shenyang 110136,China; 2.Second Parts Assembly Plant,Engineering Department of Chengdu Aircraft Industrial (Group) Corporation,Chengdu 610092,China)
Automatic hole-making in the assembly of aircraft includes the design of reference holes,clamping holes and automatic making holes.And the quick and automatic design of clamping holes is a key problem.In this paper,an algorithm for the clamping holes design was proposed to ensure the maximum spacing between any two clamping holes and satisfy the basic requirements of automatic hole-making.Details of the design were provided and the prototype module was developed and verified.This algorithm is significant to improve the efficiency of the clamping holes design and to ensure accuracy and stability of the automatic hole-making.
automatic making hole;clamping hole;skin;CATIA
2017-05-05
国防重点实验室开放基金(项目编号:SHSYS2015001)
韩志仁(1964-),男,河北唐山人,教授,主要研究方向:大飞机数字化制造,塑性成形CAE,复合材料精准制造,E-mail:hanren888@163.com。
2095-1248(2017)05-0021-05
V262.4+2
A
10.3969/j.issn.2095-1248.2017.05.003
(责任编辑:吴萍 英文审校:赵欢)
猜你喜欢
安徽科技(2021年7期)2021-08-31
军民两用技术与产品(2021年5期)2021-07-28
安徽科技(2021年2期)2021-03-05
装备制造技术(2020年2期)2020-12-14
装备制造技术(2020年2期)2020-12-14
制造技术与机床(2019年9期)2019-09-10
中国交通信息化(2019年4期)2019-07-13
航空世界(2018年12期)2018-07-16
制造技术与机床(2017年3期)2017-06-23
小学生导刊(低年级)(2016年5期)2016-05-27