
电传飞行控制系统信号补偿技术
2018-01-05 00:58杜永良高亚奎
计算机测量与控制 2017年12期
杜永良,高亚奎
(中航工业一飞院,西安 710089 )
电传飞行控制系统信号补偿技术
杜永良,高亚奎
(中航工业一飞院,西安 710089 )
信号的采集精度对控制系统的控制精度有着至关重要的影响,对电传飞行控制系统常用传感器的原理特性进行了分析,并根据其工作原理展开讨论了影响传感器测量误差的非传感器自身精度的使用问题,即:激励电源不稳定以及机械安装所形成的测量误差;针对电源精度不高所引起的信号波动对采集精度的影响的问题,提出了输入波动导致的输出波动的因果补偿方法;针对机械零位调节难度大且导致的设计复杂问题,在基于矛盾分离的方法的基础上,提出了电气调零的策略;试验、应用及分析表明,所提出了信号补偿方法能够较容易的提高电传飞行控制系统指令及反馈信号的采集精度,从而能够实现系统在整个控制范围内的高精度控制,降低了系统对机械零位调整以及对高精度激励电源设计的需求,从而简化了系统的部件设计。
传感器;信号补偿;控制精度; 电气零位;机械零位
0 引言
电传飞行控制系统以来自传感器的指令及反馈为基础,以电子信号处理及控制设备为核心,并结合信号传输电缆,代替传统的机械连杆,将飞行员的操纵输入传递到舵面的驱动装置,简化了飞行控制系统的设计、制造、调试及控制效能。最新的研究表明,电传技术为飞行控制系统带来了革命性的变化[1-2],它使得飞行控制系统可以利用复杂的实时软件优化被控系统的性能和效率,能够更灵活地响应变化中的空气动力环境,通过控制舵面运动使得飞机对操纵输入的响应在所有飞行条件下都是一致的;放宽静稳定性,运输机可以减少部分重量,战斗机可以减少更多[3-4]。同时由于电传飞行控制系统能够对飞机的失速、风切变、超速等复杂状态提供了很好的保护程序,可以实现飞行员的“无忧虑操纵”。
电传飞行控制系统的控制指令输出所综合的信号主要来自传感器感知的飞行员操纵装置位移及力、舵面运动位移、飞机的加速度、角速率等的物理量,当系统采集到的一个或多个信号测量误差较大时,必将影响系统的控制精度,若同时存在较大的零位误差时,必导致无操纵需求时非期望的指令输出,从而带来飞行员的修正需求,增加操纵负担。因此,分析电传飞行控制系统信号采集中可能引起测量误差的因素,采取合理的改进或补偿方法具有重大意义。
1 系统几类传感器原理
1.1 变压器式传感器
飞行控制系统中的控制和运动参数几乎都可以用位移或有关位移的参量来表示,因此位移是电传飞行控制系统中的最重要的参数,测量位移传感器的可靠性直接影响了整个电传飞行控制系统的可靠性。差动变压器式位移传感器采用非接触式的物理结构[5-6],故其在工作过程中无触点机械接触,从而无噪声、具有高重复性、高可靠性、理论无限寿命特性,同时它具有灵敏度高、无限分辨率、高频响应性好[7]。因此,电传飞行控制系统中对位移的测量几乎均用了此类传感器。
差动变压器式位移传感器包括角位移传感器(RVDT)和线位移传感器(LVDT),原理见图1。在位移传感器原边两端施加激励信号后,在匝数相等的副边两部分将会感应产生相同频率的交变信号,将副边A+和副边B+与信号输出端相连,副边A-和副边B-可以同时接地,也可以与另一输出端相接。当角位移传感器中的铁芯转动或线位移传感器的铁芯线性移动时,副边两部分之间的耦合发生变化,从而使副边两部分的输出电压大小交错变化。当角位移传感器铁芯的零端点转动至中央位置或线位移传感器铁芯移动至中间时,两个副边所产生的感应电动势大小相等,副边两线圈输出电压差为零。铁芯的零端点转动离中央位置越远,感应电动势之差越大,输出与铁芯零端点的转动角度或移动位移成比例,从而实现角度或者位移检测。

图1 位移传感器原理
1.2 滑动变阻式位移传感器
在电传飞行控制系统中,有时对位移的测量也可能通过滑动变阻式的传感器实现。例如,某机上便应用了滑动变阻器式位移传感器作为攻角以及舵面位置信号的测量。滑动变阻式位移传感器原理简单,见图2所示。滑动变阻器式位移传感器通过可调触点位置的改变而检测位移信号的改变,位置信号通过电阻器可调触点的不同位置对应输入信号电压的分配得到。
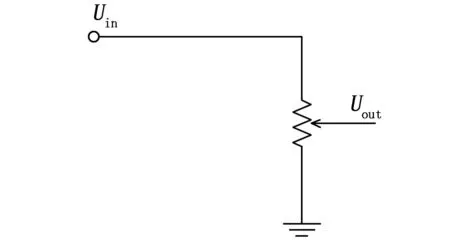
图2 滑动变阻器式位移传感器原理
1.3 应变片式力传感器
对联动式的双操纵飞机,为了区分正副驾驶的操纵输入,在系统设计时均无例外地在双操纵装置中安装了检测各个飞行员操纵装置输入力的力传感器,力传感器多用来对事故分析,有时也被用来对位移指令的辅助监控,甚至在驾驶舱操纵装置卡滞后作为操纵指令实现对飞行员操纵期望的捕获,控制飞机继续安全飞行。
目前对驾驶舱杆力的测量多采用应变片测量法,其转换原理是基于金属丝的电阻-应变效应。所谓应变效应是指金属导体(电阻丝)的电阻随变形(伸长或缩短)而发生改变的一种物理现象。应变片的变形将导致其电阻R值大小的变化,因此通过测量电阻值的变化便可以测量对应的力,电阻值的变化一般通过电桥转换为电压信号,图3给出了电路原理。
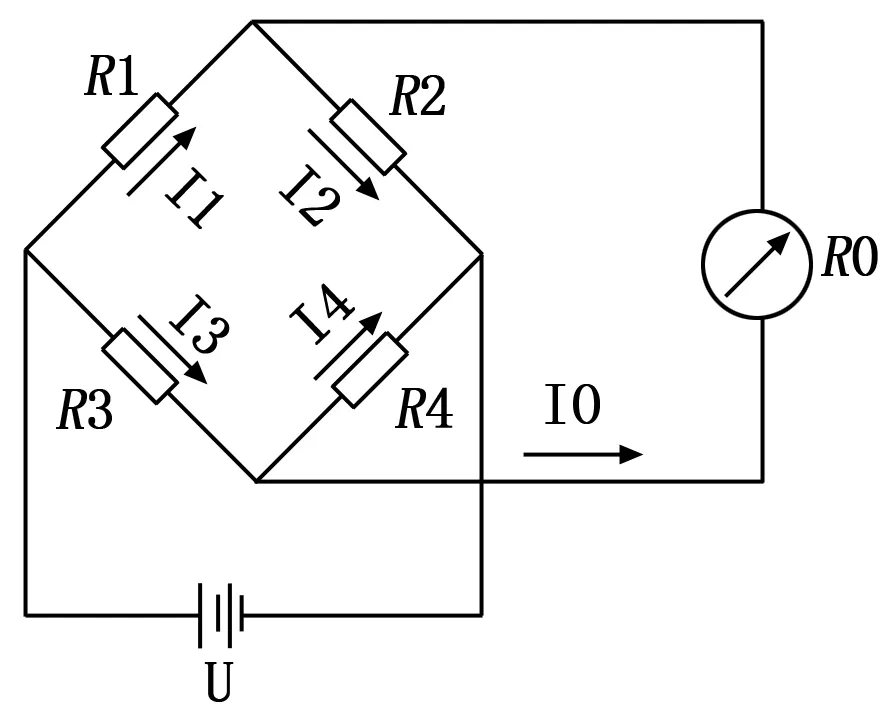
图3 恒压电桥转换电路
2 采集误差产生的主要因素
2.1 激励电源误差
差动变压器式位移传感器、滑动变阻式位移传感器以及应变片式传感器工作时均需输入一特定的激励电源,在激励电源的作用下传感器才能感知所要测量的位移及力信号,力或位移大小不同,传感器便会输出与力或位移大小相关的电信号。但当激励电压变化时,所测量值的输出电压同样也会变化[8],在测量量一定时输出与激励电源的电压变化成正比。所以,使用差动变压器式位移传感器、滑动变阻式位移传感器或应变式力传感器测量信号时,传感器的测量输出必将受到两种因素的影响:来自系统的激励电源信号的精度以及来自激励电源信号所受到的干扰。
2.2 机械安装误差
由于电传飞行控制系统中位移传感器机械行程一般都比较小,很难保证在安装驾驶杆盘、脚蹬、作动器作动筒及舵面位移传感器时使得传感器电气零位与测量机械零位完全对应,或多或少会存在小的正差或负差,也因此导致同型号不同架次中机械零位与传感器电气零位残差一致性差,从而降低了电传飞行控制系统在整个控制范围内的控制精度。
3 信号补偿策略研究
3.1 激励电源误差补偿
为防止由于激励电源信号精度所引起的传感器输出精度降低的问题,通常的做法是在设计激励电源的提供者飞行控制计算机时对激励电源的精度均提出了很高的要求,这无形使得飞控计算机的设计成本极大增加,同时由于高精度要求,使得此类电源难以加增短路保护功能,在出现短路故障后,极易出现故障蔓延,在一定程度上影响了飞控计算机乃至整个系统的可靠性。另一方面,高精度的电源设计也不能消除外界干扰对激励电源影响而导致的精度降低问题。
针对目前方法的难点及存在的不足,提出如下方法解决,即:通过串接在激励电源端的输出电阻以限制输出端短路时的电流,进行短路保护;利用传感器的采集增益固定的原理补偿电源精度不高的波动对信号采集精度的影响,即:飞控计算机采集施加到传感器的激励信号的大小为B,同时采集传感器反馈信号的值为A,以两者的比值除以传感器的理论增益K,随后乘以传感器的测量量程S,便可以得到不受激励电压大小变化的测量值T,用以下公式表示即:
(1)
串接电阻的使用,保障了在接口短路的情况下对计算机输出的保护,激励电源与信号输出同增益随动原理的应用消除了激励电源不稳定时信号采集精度下降的问题,见图4所示。
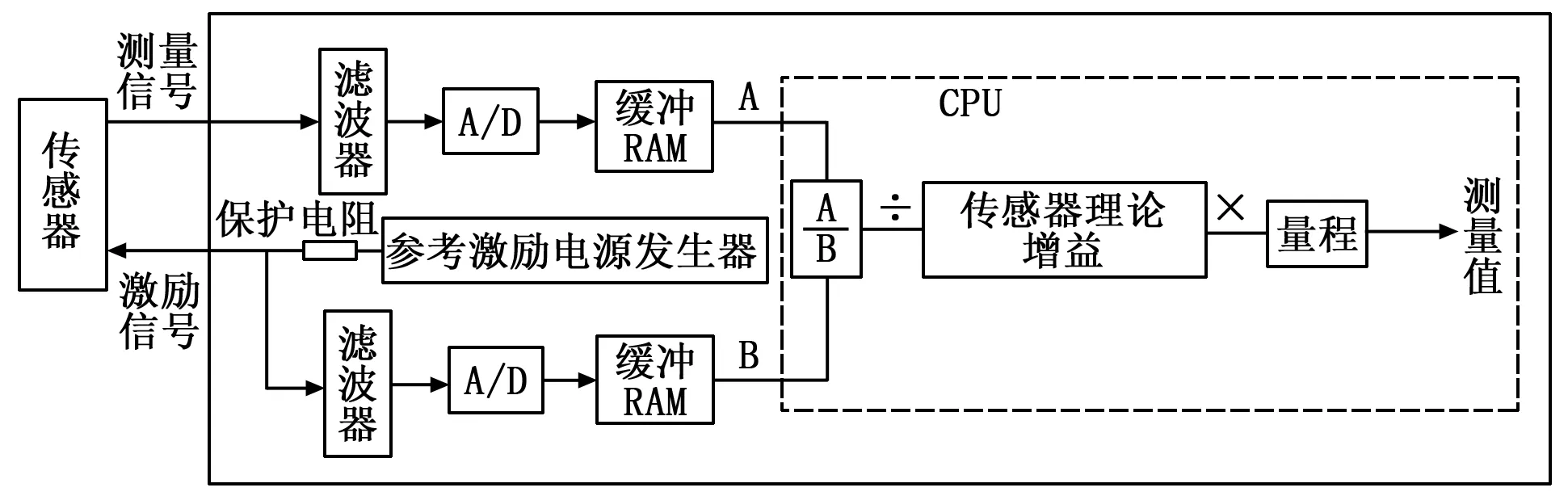
图4 电源不稳时传感器信号的补偿原理
3.2 机械安装误差补偿
通常降低对电传飞行控制系统对由于安装而引起的系统指令及信号误差的做法是预留机械调整的功能,如对驾驶舱指令传感器是将机械操纵装置固定于机械零位,通过调整螺母而调整传感器机械杆的相对长度,对作动筒调整通常是在控制指令为零时,采用调整片的方式将作动筒的输出调整至机械零位。机械式零位调整方法虽然能够在一定程度上解决初装零位误差大的问题,但其加大了设计的复杂性、调整难度大且调整后的各架次间零位信号一致性差。
根据TRIZ创新思维方法[9]将此技术矛盾抽象为分析所需要的技术参数。改善的参数:28测量精度;恶化的参数:34可维修性。利用文献[9]中的矛盾矩阵得到四条创新原理:1、32、13、11。
在解决问题的过程中,可以将TRIZ创新原理1分割原理和13反向作用原理结合起来应用,即:将信号采集分为机械零位与电气零位,从而引出机械调零与电气调零,在调整时让可动部分机械调整不动不动部分电气零位可动,也就是说通过减除在传感器初始机械零位时的电气信号,从而实现传感器测试信号的平移,实现对零位乃至整个行程信号的精确测量,其原理见图5所示。
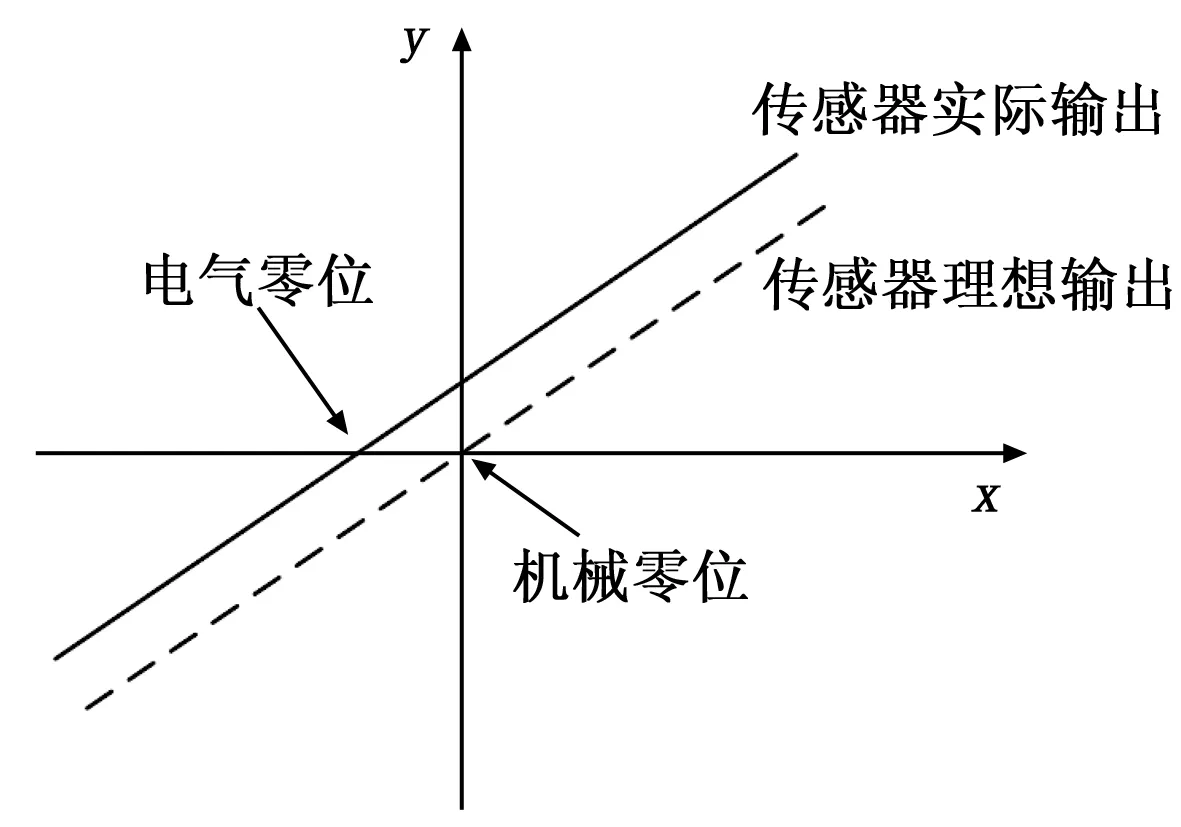
图5 机械及电气零位残差传感器输出
4 机械安装误差补偿实施方式
4.1 机械安装误差调整说明
对机械安装误差的传感器测量信号的平移方法可被称为电子修正,此方法可完全通过软件来实现,设备安装后,只要机械行程被包络在测量传感器的线性测量范围之内,均可通过此方法实现有效的调整。从此来看,本方法能够完全消除对传感器机械安装调整的需求,但并不是说传感器可以随意安装,在系统设计时仍旧应尽可能使得传感器的电气零位与测量装置的机械零位接近。
4.2 系统信号电子修正策略
由上文分析可知,电子修正即是在系统工作时,通过软件的方法去除机械安装误差所带来的测量值部分的电气输出作用,其可以完全实现软件中所得到的电气零位与机械零位完全对应,从而达到调零的作用。电传飞行控制系统的电子修正需要在飞行控制计算机初次装机时完成,需要飞行控制系统进入维护模式,其实现过程主要是为各测量量构造零位,并将零位残差记录到飞控计算机中,以便于后续指令解算时去除残差对测量精度的影响,电子修正的原理参见图6所示。
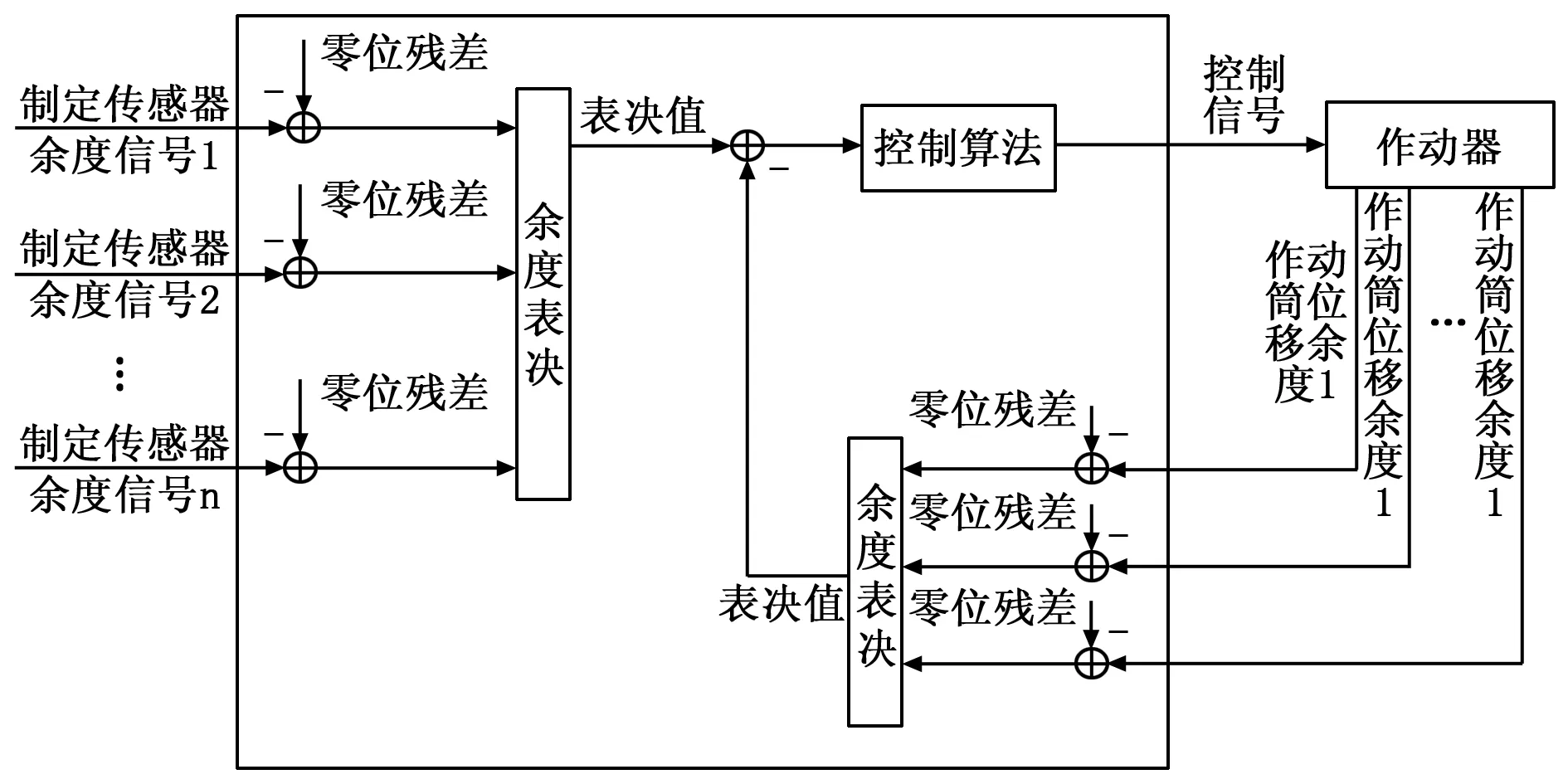
图6 机械零位传感器信号的电子修正
电传飞行控制系统中位移传感器的电子修正方法根据其归属于输入部件或输出部件不同而不同,下文分别做以简述。
对归属于输入部件的修正是确保其在机械零位时,记录其传感器的电气信号,工作过程中通过软件恒定减去记录的零位值。如对驾驶舱指令位移传感器包含:横向位移、纵向位移及航向位移的修正程序步骤一般如下:
步骤一,将机械输入拉杆及脚蹬中立位置销插好(以确保其位移机械零位);
步骤二,确保飞控计算机进入地面维护模态,并在地面维护设备中启动修正程序;
步骤三,飞控计算机读取各指令传感器零位电气信号,如果各指令传感器零位电气信号均小于预先分配的传感器机械量程的比例,将其记录在飞控计算机非易失性存储器NVM中作为零位补偿值,如果大于允许值,修正程序便报告一个故障。
对归属于输出部件的修正是通过计算机输出一定的值使得输出部件到达机械零位后,记录到达机械零位的输出值,工作过程中通过软件恒定加上记录的零位值输出值。如对舵面反馈位移信号一般包含:升降舵、方向舵、副翼作动筒位移传感器及各舵面位移传感器通常的修正序步骤如下:
步骤一,确保液压系统进入正常工作状态;
步骤二,确保飞控计算机进入地面维护模态,并在地面维护设备中启动修正程序;
步骤三,在维护系统中通过后端输出指令控制作动器运动从而带动舵面运动,当舵面从视觉上对准中立位置时,且作动筒位移信号在于预先分配的传感器机械量程的补偿范围内,通过用户确认将此值记录到飞控计算机非易失性存储器NVM中作为零位补偿值,如果大于预设值,修正程序便报告一个故障;
步骤四,读入各舵面机械零位时的舵面位移传感器电气零位信号,如果各舵面位移传感器零位电气信号均小于预先分配的传感器机械量程的比例,将其记录在飞控计算机非易失性存储器NVM中作为零位补偿值,如果大于允许值,修正程序便报告一个故障。
5 试验结果与分析
在试验室条件下,根据上述激励电源误差补偿原理与机械安装误差补偿原理设计了测试硬件支持电路相应的测试验证软件。对应用本文所设计的补偿方法前后激励电源波动及干扰情况下传感器测试的稳定性,以及传感器电气与机械零位不一致时测试信号的精度进行了对比测。试验结果表明,所设计的激励电源补偿的信号采集方法能够有效抑制激励电源不稳定和受到干扰情况下对测试结果的影响,测试信号稳定性高;机械与电气零位偏差的电子修正法能够消除安装所带来的零偏,提高位置信号检测的精度。
6 结束语
所提出的信号补偿方法已应用于某电传飞行控制系统的设计中,其中部分成果已获得发明专利。
试验、实际应用效果以及分析表明,所提出的信号补偿方法设计简单、通用性好,能够有效消除飞控计算机激励电源不稳定时所引起的测试信号不稳定、激励电源受干扰时导致的测量信号受干扰、以及机械安装误差而引起的系统测量误差大的问题,从而能够:提高同型号不同架次飞机位移指令及信号的一致性,提高各余度信号的一致性,降低余度表决的虚警率;提高电传飞控系统控制系统整个控制范围内指令信号及反馈信号精度,从而提高电传飞行控制系统整个控制范围内的控制精度;同时降低了机械部分设计以及飞控就是计算机设计的复杂性,在节省设计成本的同时能够提高了系统的维护性。
[1] Liu M, Zhang L, Shi P, et al. Robust Control of Stochastic Systems Against Bounded Disturbances With Application to Flight Control[J]. IEEE Transactions on Industrial Electronics, 2014, 61:1504-1515.
[2] Zheng X Q, Liang T, Bin Z, et al. Design and simulation of a self-repairing flight control system for UAV[A]. Control and Decision Conference (CCDC), 2012 24th Chinese[C]. IEEE, 2012:1732-1736.
[3] Kwatny H G, Bennett W H, Berg J. Regulation of relaxed static stability aircraft[J]. IEEE Transactions on Automatic Control,1991, 36:1315-1323.
[4] Junkui Y, Zaikang Q. Control Analysis and Autopilot Design for Static Unstable Missiles[A]. 2010 International Conference on Electrical and control Engineering(ICECE) [C]. IEEE, 2010:623-628.
[5] 飞机设计手册[M] . 北京: 国防工业出版社, 2003.
[6] 杜永良, 潘妍红.波音777飞机高升力控制系统余度管理分析[J].民用飞机设计与研究,2012(3):33-34.
[7] 张西涛. 某电传飞控系统角位移传感器设计优化[J]. 测控技术, 2013, 32(12):9-12.
[8] 杜永良, 高亚奎. 位移传感器仿真器设计[J]. 计算机测量与控制, 2015, 23(10):3492-3493.
[9] Savransky S D. Engineering of creativity: Introduction to TRIZ methodology of inventive problem solving[M]. CRC Press, 2002.
Fly-by-wire Flight Control System Signal Compensation Technique
Du Yongliang, Gao Yakui
(AVIC First Aircraft Institute, Xi′an 710089, China)
Signal acquisition accuracy has a great influence on the control accuracy of the control system, the sensors characteristics of flight control system are analyzed, and the using problems of sensor like power supply instability and mechanical installation zero which influence the measurement precision were also discussed. In view of the influence of power fluctuation on the accuracy of signal acquisition accuracy problems, proposed a causal compensation method to solve the volatility of the output caused by fluctuation of input. To the difficulty of mechanical zero adjusting and thus caused the design complexity, the strategy of electrical adjusting zero is put forwarded based on the method of contradiction separation. Analysis and application shows that the proposed methods can realize signal compensation for fly-by-wire control system command and feedback signals acquisition accuracy more easily, thus can realize the control accuracy of the system in the whole control range, reduce the system demand for mechanical zero adjustment and high precision excitation power supply, thus simplifying the design of system components.
sensor;signal compensation; control precision; electric zero; mechanical zero
2017-05-03;
2017-05-30。
杜永良(1979-),男,陕西富平人,博士生,高级工程师,主要从事飞行控制系统设计方面的研究
1671-4598(2017)12-0064-04
10.16526/j.cnki.11-4762/tp.2017.12.017
V249.1
A
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
科学与信息化(2021年12期)2021-12-27
炼油技术与工程(2021年4期)2021-05-03
大众投资指南(2020年10期)2020-07-24
客车技术与研究(2019年5期)2019-10-24
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
人生十六七(2016年14期)2016-12-01
