
彩色格雷码结合彩色相移光栅三维重建研究
2018-01-19 11:22闫小三李长勇孙耀宁房爱青
机械设计与制造 2018年1期
闫小三,李长勇,孙耀宁,房爱青
(新疆大学 机械工程学院,新疆 乌鲁木齐 830047)
1 引言
双目视觉三维重建技术就是机器视觉技术领域中重要的应用,该技术可以准确恢复被测物体的三维信息[1]。该优点使得双目视觉技术在日常生活娱乐、农业生产,工业测量到国防航天工业方面得到广泛应用[2-4]。格雷码编码三维重建以及格雷码结合光栅三维重建作为双目结构光三维重建中最典型的方法[5-8],两种方法都需要大量编码图像,从而增大了计算量,减慢了重建速度。此外,由于设备性能和色散等影响,格雷码无法做到唯一编码。针对以上缺点,利用黑白格雷码结合黑白四步相移光栅原理,提出了彩色格雷码结合彩色三步相移光栅编码三维重建原理并搭建了便宜的双目三维重建平台将应用于结构设计和优化工作者对于复杂表面形貌的物体进行三维定性重建与分析。
2 双目三维重建平台及原理
2.1 双目三维重建原理
为了建立被测物体世界坐标与图像坐标之间的转化关系,考虑了一般双摄像头的位置关系情况下,世界点坐标在左右图像坐标系下的映射关系,如图1所示。其中,oL-xLyLzL和oR-xRyRzR分别是左右摄像机坐标系,OL-XLYLZL和OR-XRYRZR分别是左右图像物理坐标系,oL-uLvL和oR-uRvR分别是左右图像平面坐标系。点P(XW,YW,ZW)是世界坐标系中的一点,其在左右图像坐标系中的投影分别是PL(uL,vL)和PR(uR,vR)。
经过标定后,可以得到摄像机的内参数和外参数[6],通过计算就可以得到投影矩阵。由于左右摄像机的参数以及位置不同,所以两者有各自的投影矩阵分别为ML和MR。设定左图任意一点坐标为(uL,vL),其对匹配对应的右图坐标为(uR,vR)。那么,左右图像中任意对应匹配点与世界坐标的关系,如式(1)所示。

图1 世界坐标与图像坐标之间的映射关系Fig.1 Relationship Between World Coordinates and Image Coordinates

将式(1)化简去掉 SL和SR,就可以得到式(2)。另外,将式(2)写成矩阵方程的形式,如式(3)所示。通过求解式(3)即可得到匹配点的三维坐标。

2.2 双目结构光三维重建平台

图2 三维重建平台Fig.2 3D Reconstruction Platform
首先,本实验搭建出双目结构光三维重建平台,如图所示。其结构由固定安装的两台CGU2-500C摄像机,一台极米Z3投影仪,计算机和黑色幕布组成,如图2所示。
其中,CGU2-500C摄像机重要参数有500W像素和1/2.5’’CMOS彩色芯片。镜头其成像尺寸是 1/2’’,其焦距(6~12)mm。极米Z3投影仪的对比度为5000:1,亮度为1200lm和标准分表率为(1280*800)。
3 彩色格雷码结合彩色三步相移光栅三维重建
3.1 彩色格雷码编码图
由于一幅彩色图像都有三个色彩通道,分别是R,G和B通道[7]。每个通道的取值范围都是0到255,这样一幅图像最大可以定义2563个编码区间。为了增加识别色彩的准确性,本实验将三个通道的值设置为0或255。这样一幅图像的三个通道也就可以定义23编码区间。其对应的8周期彩色格雷码图像,从第0到第7周期分别对应黑、红、黄、酸橙、青、白、紫和蓝八种颜色,如图3所示。

图3 八周期彩色格雷码图像Fig.3 Eight Cycle Color Gray Code Images
3.2 彩色三步相移光栅
由于彩色格雷码定义编码区间为8周期,相应的彩色光栅也需要定义为8周期。由于四步光栅相移技术在灰度图像时需要四幅图像,对于一幅图像来说只有三通道的彩色图像无法表示出来。为此,本实验将采用三步相移光栅法制作彩色光栅图像,其相应的各通道对应灰度值变化函数,如式(4)所示。

式中:s.val[0],s.val[1]和s.val[2]—彩色图像一个像素的三个通道的灰度值;T—该相移的像素周期长度,T=720÷k,k—该图像的周期数,720—图像的横纵像素个数。
为此制作了(720×720)大小的三步相移彩色图像,如图4所示。根据三步相移公式,可以将彩色图像的三个通道用三步相移公式表示。同时,本实验将周期个数T定义为8个周期。

图4 八周期彩色三步相移光栅Fig.4 Eight Cycle Color Three-Step Phase Grating
这样想要编码一幅图像就只需要四幅图像即可完成,其中包括2幅彩色格雷码图像和2幅三步彩色相移光栅图像。
3.3 编码投影图像
根据8周期彩色格雷码和8周期彩色三步相移光栅分别投影到维纳斯石膏头像上,然后利用摄像机拍摄左右对应的彩色格雷码投影图和彩色三步相移光栅图,如图5、图6所示。

图5 左图彩色格雷码光栅投影图Fig.5 Left Projections of Color Gray Code Grating

图6 右图彩色格雷码光栅投影图Fig.6 Right Projections of Color Gray Code Grating
3.4 相位求解
投影图相位可以分为相对相位和绝对相位。相对相位是随像素增加呈周期性的循环函数,其函数值范围永远在(0~360)°之间,如图7所示。而绝对相位则是将相对相位加上所属的周期得到的,其取值空间具有唯一性,范围随周期增加而增加。

图7 绝对相位与相对相位Fig.7 Absolute Phase and Relative Phase
对于彩色三步相移光栅投影图像的相位解码,利用可以利用式(5)计算出来其相对相位φ(i,j)弧度。由于计算的相对相位的单位为弧度,所以需要利用式(6)将弧度单位转化为角度单位。

为了解决求取相对相位出现负值的情况,需要对求取的相对相位进行正负判断。如式(6)所示,当φ(i,j)弧度<0时,则令在求解相对相位上再加上180°;当φ(i,j)弧度≥0时,保持相对相位大小不变。

彩色格雷码求解周期是根据颜色来界定周期,其中分八个周期。黑、黄、红、酸橙色、青、白、紫、蓝分别对应第0至第7周期。根据周期就可以将相对相位转化成绝对相位,如式(7)所示。

式中:φ(i,j)—绝对相位;D—周期数;φ(i,j)角度—相对相位。
为了直观检测彩色三步相移相位解码准确与否,以左摄像机彩色光栅图为例,用相位图对其进行描述,如图8所示。可以发现,其横纵相位图的灰度值变化连续过渡平滑,可以实现相位编码。

图8 彩色光栅相位图Fig.8 Color Grating Phase Diagram
3.5 三维重建结果
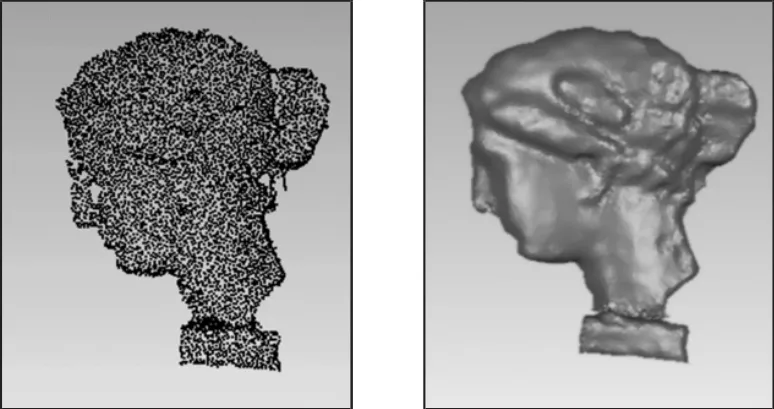
图9 点云图和封装图Fig.9 Point Cloud and Surface Diagram
通过彩色格雷码和彩色三步相移光栅图像编码解码,可以得到左右两组横纵绝对相位。然后根据相位匹配和唯一性约束原理,对左右两组绝对相位进行匹配从而得到左右匹配坐标。之后,对左右匹配坐标进行三角测量以得到其匹配点的三维信息。为了方便观察,将三维点云导入到Geomatic中对点云进行操作和显示,如图9所示。左图是彩色编码获得的点云图,右图是其点云封装图。
4 实验对比与分析
为了确保对比的准确性,本实验在黑白格雷码结合黑白四步相移光栅三维重建实验时,依然采用8周期的黑白格雷码和黑白四步相移光栅[8],其图像尺寸和彩色编码图保持一致。其8周期黑白格雷码编码图需要横纵方向各3幅,8周期黑白四步相移光栅图像需要横纵方向各4幅。通过该结构光三维重建平台,采用黑白格雷码结合黑白四步相移光栅三维重建获取的投影图。根据黑白格雷码结合黑白四步相移光栅三维重建的解码求出其横纵相位,对其匹配三维重建后的结果。
对比发现:在格雷码图像数量上,8周期黑白格雷编码图需要6幅图像,而彩色格雷码图像只需要2幅;在光栅数量上,黑白四步相移光栅需要8幅,而彩色三步相移光栅只需要2幅。故,彩色格雷码结合三步相移光栅前期的编码光栅图像数只需4幅,而黑白格雷码结合黑白四步相移光栅却需要14幅,前者比后者减少了10幅编码图。从理论上讲,前者获取图像时间比后者缩减了约71%。
从获取图像数量上分析,彩色格雷码结合彩色三步相移光栅三维重建需要拍摄8幅投影图,而黑白格雷码结合黑白四步相移光栅却需要拍摄28幅投影图。对于图像处理过程来说,前者的计算量远远小于后者。
利用Geomagic观察三维点云数量可以发现:彩色格雷码结合彩色三步相移光栅三维重建点数为65498,而黑白格雷码结合黑白四步相移光栅三维重建点数为117343,前者重建点数约是后者的56%;但从两者的点云封装图来看,两者差距较小。故彩色格雷码结合彩色三步相移光栅三维重建效果和黑白格雷码结合黑白四步相移光栅三维重建效果相差不大,同样可以满足三维重建的精度需要。
5 结论
(1)根据黑白格雷码结合黑白四步光栅相移三维重建原理,提出了彩色格雷码结合彩色三步光栅相移三维重建原理,并搭建了相应的三维重建平台。(2)通过对格雷码图像、光栅图像和投影图对比发现,彩色格雷码结合彩色三步相移三维重建方法大大减少了编码图像的数量和投影图处理的计算量,从而加快了重建速度。(3)通过对重建点云数量和封装图对比,发现彩色格雷码结合彩色三步相移光栅三维重建的效果可以达到黑白格雷码结合黑白四步相移光栅三维重建的效果。
综上所述,彩色格雷码结合彩色三步相移光栅三维重建具有编码图像少、计算量少、重建速度快的优点。
[1]H Zeng,ZC Mu,K Wang.Automatic 3D ear reconstruction based on binocular stereo vision[J].IEEE International Conference on Systems,Man&Cybernetics,2009:5205-5208.
[2]惠国保,李东波,童一飞.制造中视觉反求三维重建技术研究[J].机械设计与制造工程,2013,42(3):8-13.(Hui Guo-bao,Li Dong-bo,Tong Yi-fei.Research on the key technology of reverse manufacturing integrated MVS[J].Machine Design&Manufacturing Engineering,2013,42(3):8-13.)
[3]惠贤.大型客机B787三维重建及其气动特性分析[D].南京航空航天大学,2011.(Hui Xian.Three-Dimensional reconstruction and aerodynamic characteristic analysis of thelarge civil aircraft B787[D].Nanjing University of Aeronautics and Astronautics,2011.)
[4]马扬飚,钟约先,戴小林.大面积形体的三维无接触精确测量的研究[J].机械设计与制造,2006(10):24-26.(Ma Yang-biao,Zhong Yue-xian,Dai Xiao-lin.All-sided 3D Non-connecting detection to objects with large surface areas[J].Machinery Design&Manufacture,2006(10):24-26.)
[5]张超,杨华民,韩成.基于格雷码结构光的编解码研究[J].长春理工大学学报:自然科学版,2009,32(4):635-638.(Zhang Chao,Yang Hua-min,Han Cheng.Study of coding and decoding based on gray-code structure light[J].Journal of Changchun University of Science&Technology,2009,32(4):635-638.)
[6]刘佳音,王忠立,贾云得.一种双目立体视觉系统的误差分析方法[J].光学技术,2003,29(3):354-357+360.(Liu Jia-yin,Wang Zhong-li,Jia Yun-de.Error analysis of binocular stereo vision system[J].Optical Technology,2003,29(3):354-357+360.)[7]于烨,陆建华,郑君里.一种新的彩色图像边缘检测算法[J].清华大学学报:自然科学版,2005,45(10):45-49.(Yu Ye,Lu Jian-hua,Zheng Jun-li.Color image edge detection algorithm[J].Journal of Tsinghua University,2005,45(10):45-49.)
[8]于晓洋,吴海滨,尹丽萍.格雷码与相移结合的结构光三维测量技术[J].仪器仪表报,2007,28(12):2152-2157.(Yu Xiao-yang,Wu Hai-bin,Yin Li-ping.3D measurement technology based on structured light by combining Gray code with phase-shift[J].Chinese Journal of Scientific Instrument,2007,28(12):2152-2157.)
猜你喜欢
吉林师范大学学报(自然科学版)(2022年4期)2022-12-09
电子制作(2019年20期)2019-12-04
电子制作(2019年16期)2019-09-27
中国特种设备安全(2019年2期)2019-04-22
智能城市(2018年7期)2018-07-10
课程教育研究·学法教法研究(2017年22期)2018-06-08
计算机测量与控制(2017年6期)2017-07-01
自动化学报(2017年5期)2017-05-14
现代计算机(2016年11期)2016-02-28
中国非金属矿工业导刊(2015年5期)2015-12-22
