
高空作业车风致振动响应的数值模拟研究
2018-01-19 11:22蒋红旗茅献彪闫靖宇
机械设计与制造 2018年1期
蒋红旗 ,茅献彪 ,闫靖宇
(1.中国矿业大学 深部岩土重点实验室,江苏 徐州 221008;2.江苏师范大学 机电工程学院,江苏 徐州 221116)
1 引言
高空作业车是将人员和货物运送至一定高度,进行高空作业的专用车辆,在消防、建筑、市政建设等诸多行业应用广泛。对高空作业车的研究大多集中在作业臂的强度分析与优化、作业车的稳定性研究、调平系统的研究等方面。文献[1-2]运用有限元法对高空作业伸缩臂进行了应力、变形和模态分析,并进行结构优化,针对受力薄弱点,提出改进方案;文献[3-4]基于机、电、液一体化技术对高空作业车的调平系统进行了研究与仿真。文献[5-6]对高空作业车进行了稳定性分析与研究。动力学特性分析也是高空作业车的研究重点之一。文献[7]运用拉格朗日方程建立了直臂式高空作业车的动力学模型,讨论了臂架参数对作业车整体振动的影响;文献[8]对高空作业臂进行了基于Rayleigh-Ritz法的瞬态动力学分析。近年来,各种高空作业车的作业高度不断增加,作业臂也长细比越来越大,对风荷载的作用越发敏感,风荷载也成为控制高空作业车设计的主要荷载之一。这类机械的风振响应问题研究较少,对该类结构的风振响应特性仍然存在着一些亟待解决的问题。为研究高空作业车在风载荷作用下的风振响应特性,用有限元软件Ansys,对GKZ型折臂式高空作业车进行了风振特性分析,获得了风载荷作用下高空作业车的位移和加速度响应时程,并进一步得到了该型作业车的频域特征,为高空作业车的抗风设计提供有益的参考。
2 风荷载时程模拟
结构风振响应分析的前提是获得准确的风载荷数据,目前,常用的方法是利用脉动风速谱模拟得到脉动风载荷时程。高空作业车大多为臂架类结构,模拟作用在臂架表面的风载荷实质上是一个多维脉动风的样本实现问题。线性滤波自回归(AR)模型对于实现多维脉动风样本时程具有模拟准确,且计算量小、计算速度快的特点。自回归AR法的工作原理是:首先由人工产生一系列均值为零、具有白色谱的随机数,将其输入到自回归过滤器中,过滤器则输出具有给定特征谱的随机数,即风载荷时程序列,如风速时程或风压时程等,AR法的具体方法可见文献[9]。
为获得风载荷时程数据,选择不随高度变化的Davenport风速谱作为给定特征谱,取10m高度处的平均风速为15m/s;地面粗糙度指数取0.16;采样频率取100Hz;模拟时间长度300s;时间间隔0.1s;AR阶数取4。在作业臂头部、油缸铰接点选取10个模拟点,模拟点的坐标根据作业臂的仰角变化而定。根据自回归AR法的原理,编制Matlab程序,获得了高空作业车在最大作业高度工况和最大作业幅度工况时的风速时程曲线,如图1所示。
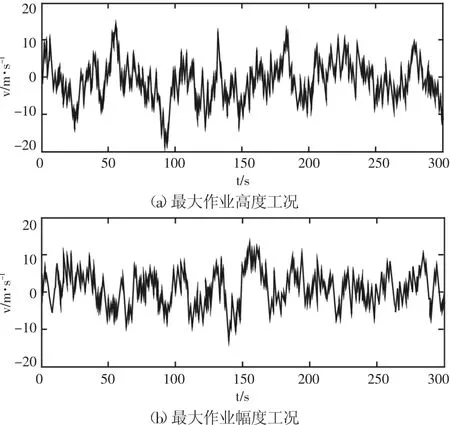
图1 两种作业工况时作业平台处脉动风速时程Fig.1 The Time History Curve of Fluctuating Wind Load
根据模拟得到的风速时程,由伯努利方程可得相应的法向风荷载时程为[10]:
式中:ρ—空气密度;μs—对应节点的平均风压系数,通常由风洞试验确定;Ai—节点对应的面积。
3 高空作业车风振响应的时域特性
3.1 高空作业车的有限元模型
GKZ系列折臂式高空作业车包括上臂和下臂,上臂头部有工作平台。高空作业时,两节工作臂分别由上下臂举升油缸伸展至一定角度,将工作人员和物料送至工作位置。上臂和下臂均由16Mn钢板焊接而成,通过水平销轴铰接。采用通用有限元软件ANSYS建立有限元模型,上臂和下臂采用壳单元(shell63),上、下臂连接及油缸铰接销轴选用梁单元(beam188),上、下臂升降油缸采用杆单元(link4),工作平台采用壳单元模拟,最终形成的有限元模型总质量473.58kg,16733个单元,如图2所示。

图2 高空作业车有限元模型Fig.2 The Finite Element Model of Aerial Platform
约束下臂尾部铰孔和下臂油缸铰孔三个方向的平动自由度(UX、UY、UZ)和两个方法的转动自由度(ROTY、ROTZ)。根据高空作业车的实际使用情况,计算工况取高空作业最大作业高度和高空作业最大作业幅度两种工况。采用Lonczos法分别对以上两种工况进行模态计算,求得结构固有频率及振型,如表1所示。

表1 模态频率Tab.1 Modal Frequency
3.2 高空作业车风振响应的时域特性
利用APDL语言编制了加载程序,将模拟得到的脉动风荷载作用于高空车的有限元模型上,风速方向垂直于作业平面,对高空作业车在最大作业高度和最大作业幅度工况进行风振响应分析,得到的高空车作业平台处顺风向的位移、加速度响应时程,如图3、图4所示。由于平均风的作用,两种作业工况下其位移响应均值不为零,加速度响应是均值为零的随机过程响应。从加速度时程曲线可以看出,在风载荷作用的初始阶段,加速度响应较大,经过15s左右,由于阻尼的作用,响应基本于趋于平稳。两种工况下作业平台顺风向、竖向的位移和加速度响应均方根,如表2所示。该型作业车以顺风向响应为主,竖向位移和加速度响应较小。
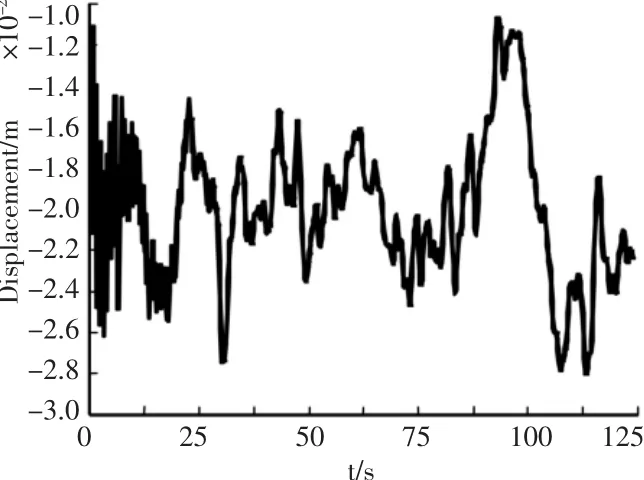
图3 最大作业高度时作业平台位移响应时程曲线Fig.3 The Displacement Response Curve in Biggest Operation Altitude
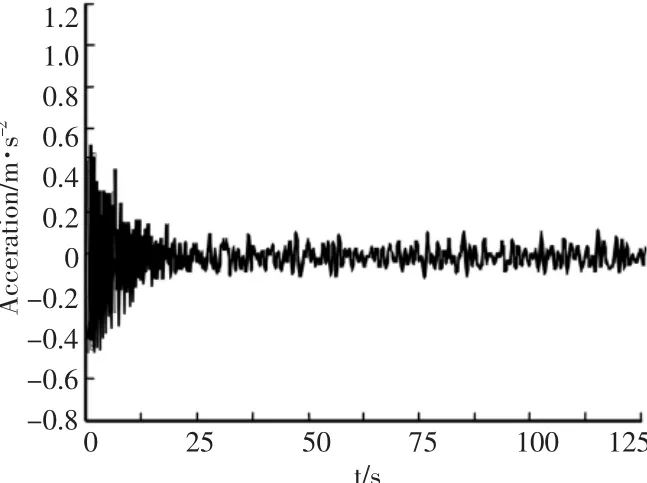
图4 最大作业高度时作业平台加速度响应时程曲线Fig.4 The Acceleration Response Curve in Biggest Operation Altitude

表2 两种工况下作业平台处位移和加速度响应的均方根Tab.2 The Root-Mean-Square of Displacement and Acceleration
4 高空作业车风振响应的频域特性
通过对时域分析中得到的位移和加速度时程分析结果进行傅立叶变换,得到两种工况下顺风向位移和加速度谱,如图5~图8所示。从图5~图8可以看出,最大作业高度工况下,位移响应在1.1Hz和6.9Hz两处有较大的共振响应峰,分别对应一阶模态和三阶模态。以第一阶振型的贡献为主,三阶振型次之,其它振型的贡献非常小;而加速度响应则以三阶振型为主,一阶次之。最大作业幅度工况也有类似情况,只是响应谱共振峰值频率有所不同,其中,第一个共振峰值响应频率为1.6Hz,对应于一阶模态,第二个共振峰值响应频率为7.2Hz。

图5 最大作业高度作业平台位移响应谱Fig.5 The Displacement Power Spectrum in Biggest Operation Altitude
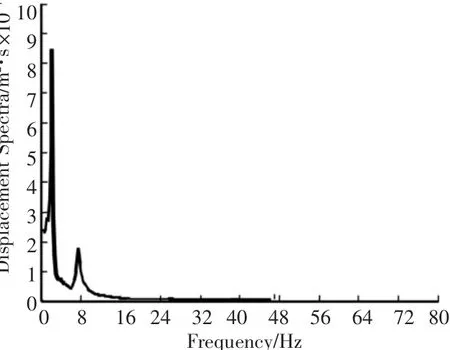
图6 最大作业幅度时作业平台位移响应谱Fig.6 The Displacement Power Spectrum in Biggest Operation Range

图7 最大作业高度作业平台加速度响应谱Fig.7 The Acceleration Power Spectrum in Biggest Operation Altitude

图8 最大作业幅度时作业平台加速度响应谱Fig.8 The Acceleration Power Spectrum in Biggest Operation Range
5 结语
为研究高空作业车在风载荷作用下的风振响应特性,采用不随高度变化的Davenport风速谱,模拟了作用在高空作业车上的风速载荷时程,以某型折臂式高空作业车为算例,计算风速取15m/s,风速方向垂直于作业平面,进行了两种作业工况下的风振响应时域分析,得到了在风荷激励下的高空作业车作业平台振动响应。得到以下结论:(1)该型高空作业车的风振响应以顺风向为主,竖向响应较小;(2)两种作业工况时作业平台的位移响应均值不为零,最大作业高度时顺风向位移响应均方根为16.15mm,略大于最大作业幅度。加速度响应是均值为零,且最大幅度工况时加速度响应均方根达119.3 mm/s2,大于最大作业高度工况的响应值;(3)通过对时域分析的数据处理,得到了该型高空作业车的频域特性,两种工况下的位移和加速度响应有两处共振响应峰,分别对应于一阶和三阶模态。位移响应以第一阶振型的贡献为主,三阶振型次之;而加速度响应则以三阶振型为主,一阶次之。两种工况的响应峰频率略有不同,主要是由作业车的结构型式决定的。
[1]蒋红旗.高空作业车作业臂有限元结构分析[J].机械研究与应用,2004(6):68-69.(Jiang Hong-qi.Finite element analysis of working jib for aerial working platform[J].Mechanical Research & Application,2004(6):68-69.)
[2]王津.自行式高空作业车作业臂有限元分析与优化设计[D].西安:长安大学,2009.(Wang Jin.Finite element analysis and optimal design for working arm of self-porpelled aerial working platform[D].Xi’an:Chang’an University,2009.)
[3]董大为.Simon_Cella高空作业车的自动调平机构[J].筑路机械与施工机械化,2004,21(6):33-34.(Dong Da-wei.Auto-leveling mechanism of simon-cella working platform[J].Road Machinery&Construction Mechanization,2004,21(6):33-34.)
[4]苏冲,张丽娜,徐海东.CDZ50登高平台消防车作业平台的自动调平系统[J].工程机械,2004,35(9):23-25.(Su Chong,Zhang Li-na,Xu Hai-dong.Auto-leveling system of CDZ50 aerialplatformfiretruck[J].ConstructionMachineryandEquipment,2004,35(9):23-25.)
[5]王富亮,熊静琪,刘亚超.折叠式高空作业车的稳定性分析[J].工程机械,2011(3):23-28.(Wang Fu-liang,Xiong Jing-qi,Liu Ya-chao.Analysis of stability for folding type aerial platform[J]Construction Machinery and Equipment,2011(3):23-28.)
[6]郭维城,张陈,肖楠.基于ADAMS的桅杆式高空作业车倾翻性研究[J].机械设计与制造.2011,10:266-268.(Guo Wei-cheng,Zhang Chen,Xiao Nan.Research on the poured over performance of mast type aloft working car based on ADAMS[J].Machinery Design & Manufactiure,2011(10):266-268.)
[7]滕儒民.高空作业车臂架系统快速设计及其运动规划研究[D].大连:大连理工大学,2012.(Teng Ru-min.Rapid design and motion planning of boom system for the aerial work platform[D].Dalian:Dalian University of Technology,2012.)
[8]董作见,吴晓,罗涛.基于Rayleigh-Ritz法的伸缩臂瞬态动力学分析[J].机械设计与制造,2015(1):184-186.(Dong Zuo-jian,WU Xiao,LUO Tao.Telescopic boom transient dynamics analysis based on rayleigh-ritz method[J].Machinery Design & Manufactiure,2015(1):184-186.)
[9]鲍侃袁.大型双曲冷却塔的风荷载和风致响应理论分析与试验研究[D].杭州:浙江大学,2009.(Bao Kan-yuan.Theoretical and experimental research on wind load and wind induced response of large hyperbolic cooling towers[D].Hangzhou:Zhejiang University,2009.)
[10]黄本才,汪丛军.结构抗风分析原理及应用[M].上海:同济大学出版社,2008.(Huang Ben-cai,Wang Cong-jun.The Principle and Application of StructuralWindResistance Analysis[M].Shanghai:TongJi University Press,2008.)
猜你喜欢
兰州交通大学学报(2022年2期)2022-04-26
结构工程师(2020年2期)2020-06-17
特种结构(2019年2期)2019-08-19
工业设计(2019年4期)2019-06-11
电子制作(2018年19期)2018-11-14
西南交通大学学报(2018年5期)2018-11-08
中国特种设备安全(2018年12期)2018-03-15
建筑机械(2018年3期)2018-02-14
同济大学学报(自然科学版)(2018年1期)2018-02-08
振动工程学报(2015年2期)2015-03-01
