
一种轮腿式悬垂绝缘子检测机器人机构分析
2018-01-19 11:23王洪光张宏志
机械设计与制造 2018年1期
王 林 ,王洪光 ,张宏志
(1.中国科学院沈阳自动化研究所,辽宁 沈阳 110016;2.中国科学院大学,北京 100049;3.锦州超高压局,辽宁 锦州 121000)
1 引言
输电线路绝缘子是安装在输电线路与铁塔之间、由绝缘材料制成的器件,使输电线路与铁塔在机械上连接而在电气上绝缘,是架空输电线路的重要组成部分。运行中的线路绝缘子由于受到外界多种因素的影响,会逐渐出现绝缘水平下降的老化现象,容易引起输电线路短路、掉线故障,严重威胁线路的安全运行。传统的检测方法为人工登塔检测,存在劳动量大、检测效率低、危险性高的缺点。因此,研制绝缘子带电检测机器人是十分必要的。
自21世纪以来,国内外众多科研机构开展了线路绝缘子带电检测检测人的研究。基于蠕动式移动机构,韩国电力研究院研制了水平双联绝缘子串带电检测与清扫机器人[1]和悬垂绝缘子串带电检测与清扫机器人[2],文献[3-4]提出了一种机器人移动机构,文献[5]提出了一种悬垂绝缘子带电检测机器人方案。韩国电力研究院研制的基于蠕动式移动机构的两种原理样机质量轻、负载能力强、安全性高,然而运动速度慢、结构复杂、运动控制困难、对环境的适应能力较差、易损伤绝缘子表面的涂层。基于履带式移动机构,沈阳自动化所研制了水平双联绝缘子串带电检测机器人[6],该机器人运动速度快、安全性高、对环境的适应能力强,然而履带式机构难以运用到悬垂绝缘子串的检测中。文献[7]提出了一种履带式绝缘子带电检测机器人方案,适用于水平绝缘子串的带电检测。基于轮腿式移动机构,韩国电力研究院研究院研制了悬垂绝缘子带电检测机器人[8],该机器人质量轻、移动速度快、短接的绝缘子片数少、对环境的适应性较强,然而运动平稳性较差、存在速度冲击。此外,文献[9]提出了一种基于轮腿式机构的绝缘子检测机器人。针对500kV悬垂绝缘子带电检测任务要求,考虑到机器人的质量、运动速度、机构复杂程度、控制系统的复杂程度、对绝缘子表面的损伤性,基于轮腿式移动机构,提出了一种悬垂绝缘子带电检测机器人机构,确定了机构的主要尺度参数,并进行了运动学分析。针对该机器人在运动过程中存在速度冲击的不足,分析了冲击产生的原因并给出了解决方法。
2 检测任务描述
悬垂绝缘子带电检测机器人工作于500kV超高压交流输电线路,直线塔上的悬垂绝缘子串线路环境及线路绝缘子的主要尺寸,绝缘子的片数通常为25-32,如图1所示。绝缘子的型号为XWP2-160,为瓷质双伞盘形绝缘子,釉质表面涂有憎水性材料。其标称直径为280mm,结构高度为155mm。
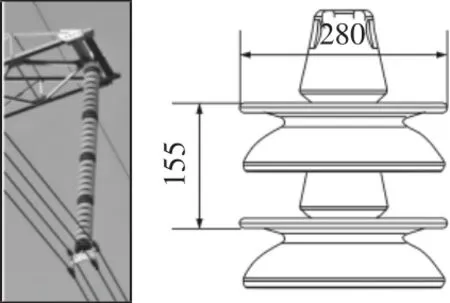
图1 悬垂绝缘子串与输电线路绝缘子结构尺寸Fig.1 Suspension Insulator Chain and Dimensions of Insulator
借鉴人工登塔检测绝缘子的作业流程,并考虑到作业任务的安全性,制定机器人的检测流程为:机器人在电力工作人员的辅助下上串后,从铁塔侧开始,每跨越一个绝缘子,机器人停止运动并进行绝缘电阻的测量,机器人重复检测步骤直至完成整串绝缘子检测,检测任务完成后机器人返回到起始位置,工作人员辅助机器人下串,检测数据可由工作人员导入电脑进行分析。在整个检测流程中,如果检测到的零值绝缘子数超过一定的数值,机器人停止检测,返回起始位置。绝缘子检测机器人工作于强电磁场环境,需克服重力的作用在高空进行作业,因此,该机器人必须满足以下要求:移动能力、自主性、安全性、电磁兼容性、轻量性、环境适应性、高效率。
3 机器人构型与运动学分析
基于轮腿式移动机构,针对500kV超高压交流输电线路中使用广泛的瓷质双伞盘形绝缘子,结合绝缘子带电检测任务需求,提出了一种悬垂绝缘子检测机器人机构,机构简图,如图2所示。该机器人由机架、三组轮腿式驱动单元、开合机构和检测机构组成。其中三组轮腿式驱动单元沿绝缘子串周向均匀分布,每组轮腿式驱动单元由上轮腿单元和下轮腿单元组成,上轮腿单元和下轮腿单元由三条均布的轮腿组成,上、下轮腿单元由同步带连接,两者具有60°的相位差。开合机构用于机器人的上下串操作,检测机构通过检测绝缘电阻判断绝缘子是否为低值绝缘子。

图2 悬垂绝缘子检测机器人机构简图Fig.2 Kinematic Diagram of Inspection Robot for Suspension Insulators
假设绝缘子串上的绝缘子轴线在同一直线上,由于机器人的三组轮腿式驱动单元沿绝缘子串周向均匀分布,在对机器人的运动流程分析时可简化,仅用一组轮腿式驱动单元进行分析,简化后机器人向上运动的流程,如图3所示。
机器人的下轮腿单元与绝缘子的下瓷裙的上表面接触,如图3(a)所示。机器人的轮腿式驱动单元驱动轴逆时针旋转一定的角度后,机器人的上、下轮腿单元分别与相邻绝缘子的下瓷裙的上表面接触,如图3(b)所示。驱动轴逆时针旋转,下轮腿单元脱离绝缘子表面,上轮腿单元与绝缘子表面接触。驱动轴继续逆时针旋转,机器人的上、下轮腿单元同时接触同一片绝缘子表面,如图3(c)所示。驱动轴逆时针旋转,机器人的上轮腿脱离绝缘子表面,下轮腿与绝缘子接触,驱动轴继续逆时针旋转,机器人的上、下轮腿同时接触相邻绝缘子的表面,如图3(d)所示。轮腿式驱动单元每旋转120°,机器人跨越一个绝缘子。机器人向下运动流程与向上运动流程类似。
在分析了机器人的运动流程的基础上,结合瓷质双伞盘形绝缘子的结构参数,确定了机器人的尺度参数。机器人的轮腿长度为77.5mm,上下轮腿单元的转动中心距离为77.5mm,轮腿式驱动单元与绝缘子串轴线的距离为190mm。建立坐标系,如图4所示。对绝缘子的表面进行简化,简化后绝缘子下瓷裙的上表面的母线方程可以表示为:y=-0.9x+142.12,x∈[84,135] (1)

图4 绝缘子外形简化图Fig.4 Simplification of Outline of Insulator
机器人下轮腿单元与绝缘子表面接触,如图4(a)所示。由于点A1在绝缘子表面上,从而可以得到:

式中:θ—轮腿的转角。
机器人上轮腿单元与绝缘子表面接触,如图4(b)所示。由于点B1在绝缘子表面上,从而可以得到:


假定机器人跨越一片绝缘子的时间为3s,则轮腿式驱动单元在3s内转过的120°,据此得到机器人的运动曲线,如图5所示。从图中可以看出,机器人在轮腿式驱动单元转动角度为210°时,产生了速度冲击。
对以上两式进行微分可得机器人的速度为:

图5 机器人y方向速度曲线与位移曲线Fig.5 Displacement Curve and Speed Curve of Robot Along y Axis
4 产生速度冲击的原因
分析机器人的运动流程可知,机器人速度发生冲击的时刻恰好是上轮腿单元和下轮腿单元同时接触绝缘子的时刻,以上、下轮腿单元同时接触接触相邻绝缘子为例阐明速度冲击产生的原因。机器人下轮腿单元接触绝缘子,上轮腿单元即将接触相邻绝缘子的状态,如图6所示。

图6 上轮腿单元即将接触绝缘子的状态Fig.6 Upper Wheel-Leg Unit about to Contact with Insulator
由速度合成原理和正弦定理可得:

式中:vrobot—机器人的速度;φ1—下轮腿单元与绝缘子接触点切线的倾角;l—轮腿的长度,值为77.5;w—轮腿式驱动单元的转动角速度。下轮腿单元即将离开绝缘子,上轮腿单元与相邻绝缘子接触的状态,如图7所示。

图7 下轮腿单元即将接触绝缘子的状态Fig.7 Lower Wheel-Leg Unit About to Leave Insulator
由速度合成原理和正弦定理可得:

式中:φ2—上轮腿单元与绝缘子接触点切线的倾角。
对于文中提出的机器人,在上、下轮腿单元同时接触绝缘子时,有下式成立:

式中:φ1=φ2。
从式中可以看出,当上下轮腿单元同时接触绝缘子时,根据式(4)和式(5)计算得到的上轮腿末端的速度不相等,此时产生速度冲击。由图5可知,机器人的轮腿式驱动单元每转动60°,产生一次速度冲击。
5 消除冲击的措施
从图6、图7中可以看出,当α=β=π/3时,机器人处于同一状态,从式(7)可以看出,为了减少速度冲击,可适当减少轮腿长度或者减少轮腿角速度。然而轮腿的最小长度取决于绝缘子的机构参数,因此,通过减小轮腿的长度来减少速度冲击的效果是有限的。通过合理规划机器人的运动,减小上下轮腿同时接触绝缘子时轮腿的转动角速度可以有效地减少或者消除速度冲击。从图5以及以上的分析中可以看出,机器人的速度具有一定的周期性,其周期正好为轮腿式驱动单元转动60°所需的时间,因此针对轮腿式驱动单元转动60°进行轨迹规划,保证轮腿的起始速度和终止速度均为零即可消除速度冲击。对轮腿式驱动单元的转动角速度采用梯形规划,条件为:

规划后轮腿式驱动单元角速度曲线、角度曲线,如图8所示。机器人y方向的速度曲线、位移曲线,从图中可以看出,轮腿式驱动单元转动角度为210°时,机器人的速度为零,从而消除了速度冲击。

图8 轨迹规划后的运动曲线Fig.8 Motion Curves of Robot after Trajectory Planning
6 结语
基于轮腿式移动机构,针对500kV超高压交流输电线路绝缘子带电检测任务,确定了一种绝缘子带电检测机器人的尺度参数,介绍了其运动原理,分析了机器人运动学。通过仿真简例,指出了机器人在运动过程中存在速度冲击的问题,并结合机器人的运动原理给出了冲击产生的原因。最后,通过对轮腿式驱动单元进行合理的轨迹规划,消除了速度冲击。结果表明,进行轨迹规划后的机器人可以有效消除冲击,运动平稳。提出的绝缘子带电检测机器人可应用于500kV交流输电线路绝缘子串的带电检测,能够提高检测效率和检测准确率,减轻电力工人的劳动强度,推进电力系统自动化的进程。
[1]Cho B H,Byun S H,Park J Y.Development of automatic inspection robot for live-line insulators[C]//IEEE International Conference on Transmission&Distribution Construction,Operation and Live-Line Maintenance.IEEE,2006:1-5.
[2]Park J Y,Cho B H,Byun S H.Development of cleaning robot system for live-line suspension insulator strings[J].International Journal of Control Automation&Systems,2009,7(2):211-220.
[3]Phillips A J,Nave J C,Bartlett G R.Apparatus and method for inspecting high voltage insulators:US,US8991273[P].2013-02-28.
[4]肖华,朱琼,吴功平.高压线路悬垂绝缘子清扫机器人爬行机构:中国,200510018836.5[P].2005-11-16.(Xiao Hua,Zhu Qiong,Wu Gong-ping.Crawl mechanism of clearing robot for suspension insulators on high voltage line:China,200510018836.5[P].2005-11-16.)
[5]郭锐,贾娟,仲亮.悬垂瓷质绝缘子串检测机器人系统:中国,20121009 1572.6[P].2012-08-01.(Guo Rui,Jia Juan,Zhong Liang.Robot system for detecting suspension porcelain insulator string:China,201210091572.6[P],2012-08-01.)
[6]Wang H,Jiang Y,Liu A.Research of power transmission line maintenance robots in SIACAS[C]//International Conference on Applied Robotics for the Power Industry.2010:1-7.
[7]曹雷,张峰,郭锐.水平绝缘子串带电检测机器人:中国,201210092798.8[P].2012-08-01.(Cao Lei,Zhang Feng,Guo Rui.Electrified detection robot for horizontal insulator string:China,201210092798.8[P].2012-08-01.)
[8]Park J Y,Lee J K,Cho B H.An inspection robot for live-line suspension insulator strings in 345kV power lines[J].IEEE Transactions on Power Delivery,2012,27(2):632-639.
[9]贾娟,郭锐,曹雷.双串耐张绝缘子串带电检测机器人:中国,2012100-96159.9[P].2012-07-25.(Jia Juan,Guo Rui,Cao Lei.Dual-string tension insulator strings charged Inspection Robot:China,201210096159.9[P].2012-07-25.)
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
计算技术与自动化(2022年1期)2022-04-15
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
电子制作(2018年17期)2018-09-28
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年3期)2016-03-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年6期)2015-04-17
