
液压管路振动功率流传递路径分析
2018-02-20 12:08安晨亮马金玉张青松权凌霄
噪声与振动控制 2018年6期
安晨亮,马金玉,张青松,权凌霄
(1.北京航天发射技术研究所,北京 100076;2.北京精密机电控制设备研究所,北京 100076; 3.燕山大学,河北 秦皇岛 066004)
在工业领域中,复杂液压管系中管路的振动会给工业生产带来巨大危害。液压管路是工程机械类设备故障率最高的子系统,因此控制振动对延长元件寿命十分重要[1]。振动传递的控制,以控制能量的传递环节为主,以控制能量扩散为辅,尽量降低传递到振动接受结构上的能量,并使振动接受结构上的能量合理分布,从而减少结构的振动。要控制能量的传递环节,首先要分析能量的传递路径,辨识出主要的传递路径,从而有针对性地进行控制[2]。传统的传递路径分析法以速度或力为研究变量,结合相应的传递函数得到各路径的贡献度,从而完成对各传递路径的评价。新发展起来的功率流法以功率为研究变量,能够直接反映振动传递的本质,具有更好的研究价值和应用前景[3]。
国内外学者基于功率流理论研究系统振动问题已有40多年历史。上世纪60年代,Lyon等[4]率先提出了耦合振动功率流的计算方法。80年代初,Goyder等[5]首次将功率流理论引入复杂系统的振动控制研究中,从振动能量传递的角度,研究了典型板梁结构内功率流沿各种振动波形的扩散机理,提出了经过单层和双层隔振结构进入无限基础结构的功率流表达式。在此基础上,Pinnington[6]将功率流理论由无限基础结构扩展到有限基础结构,研究了采用连续隔振元件时输入基础结构的功率流,初步探讨了多点耦合振动传递模型中功率流的算法。国内关于振动系统功率流方面的研究借鉴了Goyder和Pinnington等的成果,严济宽、宋孔杰等[7-8]学者率先将功率流理论应用到隔振研究中。
本文针对液压管路系统振动传递模型,构建管路系统各零部件功率流表达式,采用有限元功率流法对各振动受体的功率流分布进行分析,结合传递路径分析方法,辨识传递振动能量的主要路径。最后通过实验与理论分析结果进行对比,验证其准确性。
1 基于有限元的连续体功率流计算
工程机械设备液压管路系统中管路网络错综复杂,故无法实现对全部液压管路系统进行振动传递特性分析,因此,拟采用先局部后整体的分析思路,首先对一段典型弯曲空间液压管路进行振动特性研究,探索典型管路振动情况。管路三维模型如图1所示。
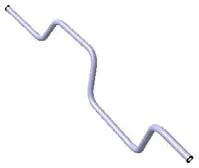
图1 典型弯曲空间管路
工程实际中一般不会直接对复杂结构整体进行分析,而是通过转化思想将其划分为多个简单的典型子结构进行分析,子结构作为一个小型系统分析起来相对容易。如图2所示,由力矢量和速度矢量表示的振动能量在结构体传递时逐渐耗散,箭头由长变短表明所传递的能量逐渐减小[9]。
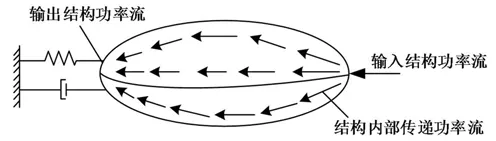
图2 复杂结构内部振动能量传递
采用有限元功率流法能够计算出各离散单元的功率流密度,然后从一维、二维、三维的层面上对结构的振动能量进行全面描述,能够使振动能量在结构体内的传递情况得到复现。
1.1 连续体功率流计算方法
有限元功率流法的本质是结构离散化,通过有限元法计算微元速度。类似于对应力的理解,功率流通过某一截面时近似看成一种强度。用作用力替代节点力矢量,求解得到功率流密度[10]。
板壳结构和实体结构的连续体不存在杆和梁的特殊结构,没有上述描述的自然节点,只能通过离散化方法找到虚构的节点,以此为基础研究能量传递过程[11]。通过建立笛卡尔坐标系进行板壳结构和实体结构的建模,研究由内力引起的能量流在结构内部的传递特性。连续体模型如图3所示。

图3 连续体内部能量传递模型
图中b为单位面积单元;ni为单元b表面的单位法线,其正方向为从单元内部指向单元外部;Tni为位于单元表面引起内部运动的牵引力。
由功率流公式可导出沿着ni方向的能量流的表达式为

其中:pn为单位时间内通过单元单位面积的能量传递,且该能量是沿着单元正法线方向传递;vi为速度矢量。
通过柯西方程,得到牵引力计算表达式为

其中:σij为应力张量。
因此能量流传递可表示为

进而得到j方向上能量流密度向量表达式为

在定义速度矢量vi和应力张量σij点乘的基础上,可以初步知道能量流密度并不是孤立存在的,它会随着坐标位置和时间的变化而变化。在连续系统中,能量流密度向量全面描述了能量以何种方式进行传递,并且在已有公式基础上,能够清晰了解到连续体内各点在空间任意方向上的能量传递过程。
能量流密度向量pj表示在j方向单位面积上由计算得到得功率流之和,即有

其中:pij表示对应每个应力分量的能量流密度,其中j取值1,2,3。
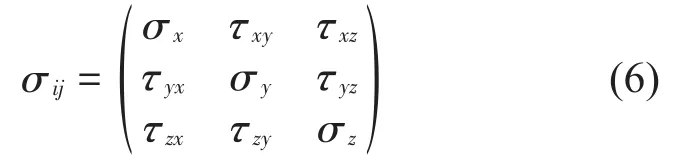
由于应力张量为3×3阶矩阵,根据弹性力学理论,连续体单元应力张量为
对应的能量流密度向量pij同样也是3×3阶矩阵,表达形式见式(7)。
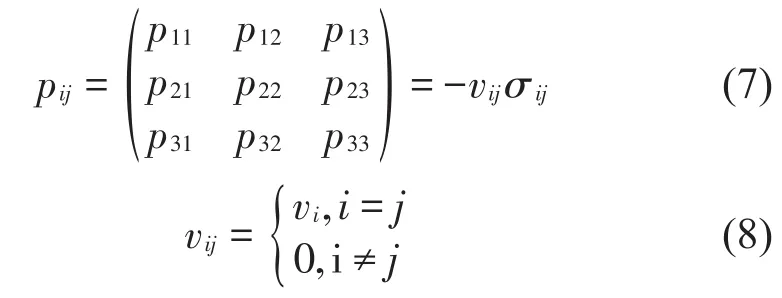
由上式可知,vij代表的对角线向量是由3个速度分量组成的,能量密度向量pij是由9个分量组成的非对称2阶向量。
1.2 板壳结构的有限元功率流推导
液压管路系统简化结构主要由液压管路、管夹、管接头等基本元件组成,根据液压管路系统中各元件的结构特点,将液压管路系统等效为板壳结构和实体结构的组合体进行分析。
板壳结构在某一方向上的功率流由平面和弯曲两种形式的功率流构成。创建单元坐标系,这两种形式的功率流在局部坐标系中通过线性叠加计算,可以得到不同方向的功率流数值。
假设板壳结构为均匀的、连续的、变形微小且各向同性的线弹性的结构[12]。根据板壳基本假设和弹性力学基本知识,推导出用挠度表示的应力方程为
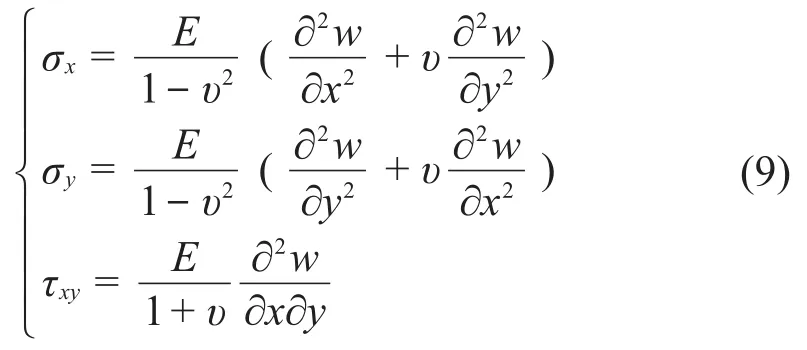
其中:w为z方向上的变形,即挠度/m;υ为泊松比;E为抗拉弹性模量(Pa)。
由于薄板侧面中的应力分量无法精确满足边界条件,一般采用与作用在薄板界面上并且与应静力等效的内力来替代该应力[13]。取板壳的微小单元进行研究,三个边长分别为dx、dy和t,应力σx、σy、τxy和τyx、τyz、τxz作用于单元横截面上,如图4所示,横截面内力如图5所示。
研究板壳问题时,将分别考虑板壳中存在的平面问题和板壳弯曲问题。对于板壳平面问题,截面内力通过膜力表示,分别为:Nx、Ny、Nxy和Nyx;对于板壳弯曲问题,截面内力通过弯矩、扭矩和剪力表示,分别为:Mx、My、Mxy、Myx、Qx和Qy。利用截面应力的平衡方程和积分运算,应力作用的方程用截面内力表示。
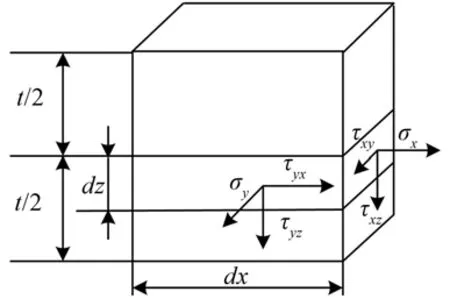
图4 板壳结构单元应力
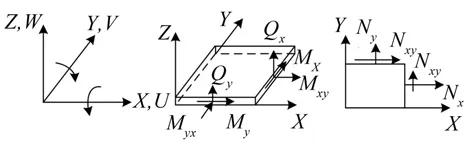
图5 板壳横截面坐标及内力
截面纵向力表达式分别为
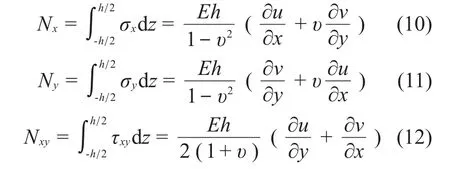
截面弯矩和扭矩表达式分别为
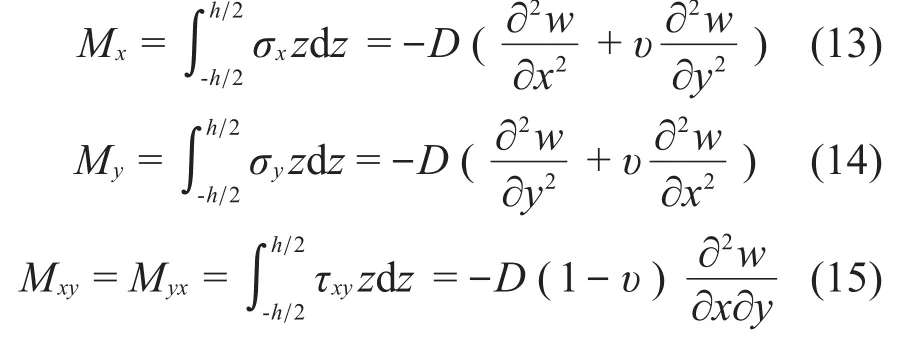
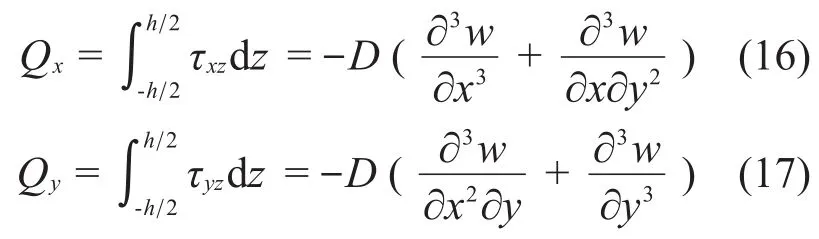
截面剪力表达式分别为
通过上述推导过程转化求解板壳应力之后,分析得出壳体中面内力,此次求解说明板壳问题求解过程可转化为微元体中面受力求解过程。
根据前文所述,板壳截面内力能够与有限元位移相呼应,通过分析板壳结构,用应力和位移两个物理量表示功率为
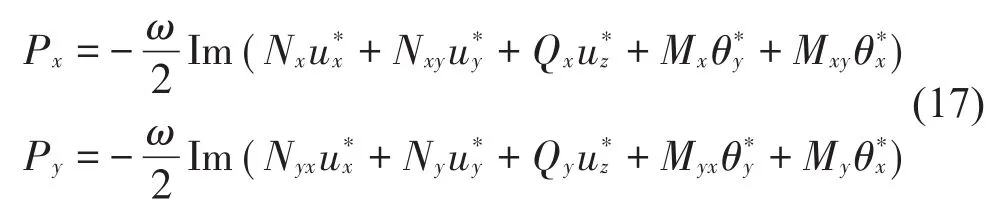
其中:Px为x方向上的功率流(W);Py为y方向上的功率流(W)。
1.3 实体结构有限元功率流推导
实体结构分析中,一般选取实体中一块微元进行讨论,该微元的受力状态通过6个应力分量来表示,分别为正应力σx、σy、σz和剪应力τxy、τyz、τzx。取弹性体内一块微元,其应力形式如图6所示。
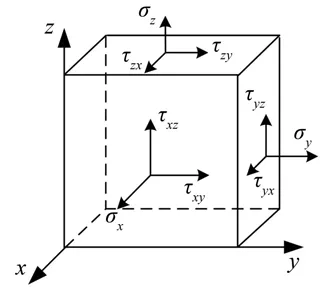
图6 弹性实体单元应力形式
实体单元是最常见的单元形式,其单位面积上通过的功率流为[14]

其中:σn是法线n方向上的正应力,τnl和τn2是1和2方向上的剪应力,和分别为法线n方向、1方向和2方向上的复数速度的共轭。
实体单元具有3个方向的自由度,分别为x、y、z方向,用正应力、剪应力和位移表示功率流分别为
2 管路系统有限元功率流分析
2.1 管路系统输入点激励载荷分析
液压管路系统正常工作时,所受到的各种振动载荷都可成为管路子系统的激励源,各振动载荷所引起的管路子系统振动响应较为复杂,为简化振动响应分析,一般认为每个激励在管路系统子结构上的响应满足线性叠加原理。本文主要考虑多个单激励分别作用于系统结构上,分析管路系统输出端的功率流情况,进而研究液压管路系统与不同激励的相互关系。
在工程上一般将频率域分为n个分析频段,各频段依次间隔Δω/n,因此可以用输入点的激励与响应速度之间的乘积表示计算输入点的功率流

其中:Psi为激励点的功率流(W);Fsi为激励点的力(N);Xsi为激励点位移响应(m)。
从有限元计算结果中可以直接提取出位移响应X,在已知激励力情况下,可求解得到激励点功率流。当系统受到多个激励分别作用时,根据叠加原理可知,输入功率流为所有输入点功率流总和

其中:Ps为输入系统总功率流(W)。
在垂向激励和力矩激励分别对管路系统单独作用时,完成对管路系统的振动特性分析。液压管路系统在垂向激励单独作用情况下和单一力矩激励作用时管路系统总体振动功率的传递情况分别如图7和8所示。
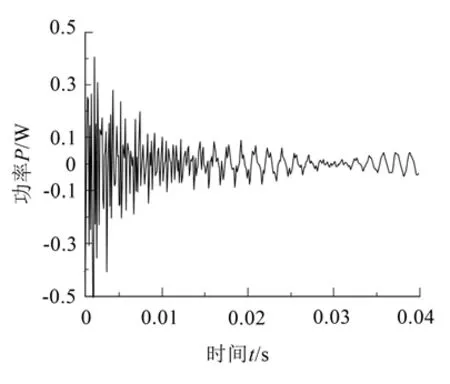
图7 垂向激励作用下系统功率流曲线
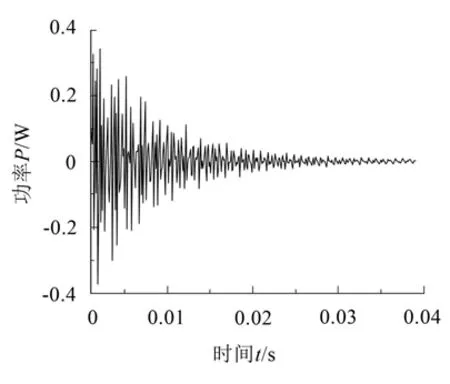
图8 力矩激励作用下系统功率流曲线
由图7和图8可知,曲线中出现的振动功率表现出一定的波动性,并且力矩激励比单向激励作用时更易使总体功率趋于稳定。
2.2 基于有限元功率流的传递路径分析
通过上述振动传递特性分析可知,在液压管路振动传递路径系统中,激振源起到了相当重要的作用。以下将通过比较不同激励下不同传递路径中功率流数值的大小,辨识主要振动传递路径,为振动控制研究提供参考。
液压管路系统受到垂向激励和力矩激励分别作用时,传递到管接头的功率流如图9和图10所示。规定第1条传递路径为通过激振源传递到管接头部分,如图9(a)和10(a)所示;第2条传递路径为通过激振源传递到管夹部分,如图9(b)和10(b)所示。分别对传递到管接头和管夹部分功率流值的振动传递情况进行详细分析。
由图9和图10可得出,某一垂向激励或力矩激励单独作用在管路系统子结构初始端时,管路系统子结构受体中均有振动能量的留存,且通过管接头传递的振动能量整体大于通过管夹传递的振动能量。结果表明,管路-管夹-管接头这一传递路径为主要传递路径,该研究结论对管路振动控制研究具有重要意义。
3 实验研究
3.1 稳定转速下管路系统振动实验
当液压泵转速为300 r/min时,保持转速不变,调整液压系统泵出口处电磁溢流阀,因试验管路为回油低压管路,使系统压力分别取值为2 MPa和4 MPa,通过采集设备得到管夹和管接头两个位置在不同压力下的管路振动加速度,通过MATLAB软件处理实验数据可得到振动能量随时间变化的曲线。
采集试验管路分别在X、Y、Z3个方向传递到管夹和管接头的实验数据,绘制功率流曲线如图11所示。
通过分析上述曲线可得出,实验测得传递至管夹及管接头处的功率值相差较大,管路初始端至管接头处的振动能量传递过程为主要振动传递路径,与通过有限元功率流法所得到的管路系统振动能量传递规律一致。
3.2 稳定压力下管路系统振动测试实验
当液压泵出口压力调定为3 MPa时,保持电磁溢流阀开口度不变,调整液压泵排量,使液压泵转速分别取值为400 r/min和600 r/min,通过NI数据采集设备得到多点在不同转速下的振动加速度,通过MATLAB相关软件处理实验数据可得到振动能量随时间变化的曲线。
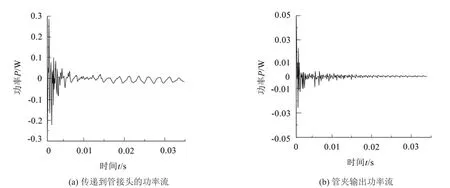
图9 垂向激励作用时系统功率流曲线
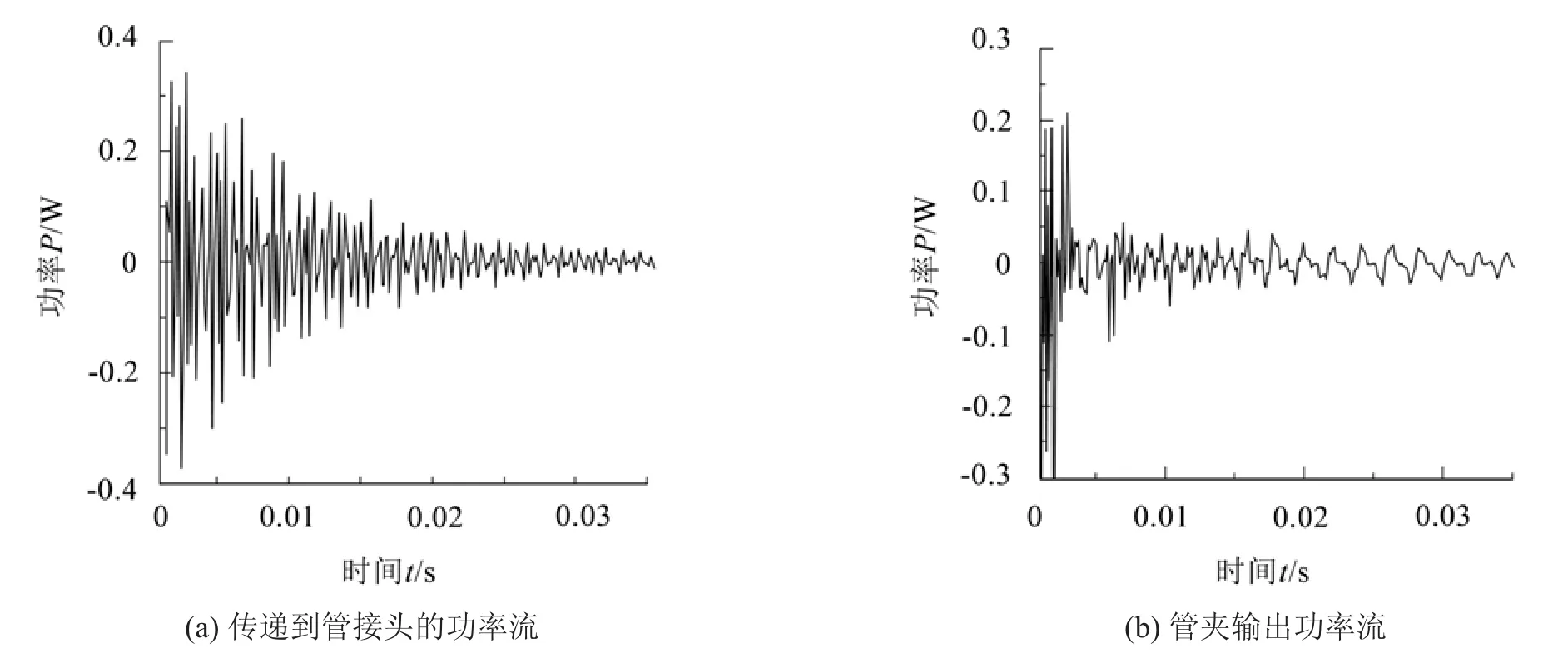
图10 力矩激励作用时系统功率流曲线
采集试验管路分别在X、Y、Z3个方向传递到至管夹和管接头的实验数据,绘制功率流曲线如图12所示。
通过分析上述曲线可得出,实验测得传递至管夹及管接头处的功率值相差较大,管路初始端至管接头处的振动能量传递过程为主要振动传递路径,说明在压力一定、转速变化情况下与通过有限元功率流法所得到的管路系统振动能量传递规律一致。
4 结语
液压管路振动是工程机械设备发生故障的重要原因之一,控制振动对延长其寿命十分重要。本文以一段典型弯曲空间液压管路为研究对象,建立管路系统各零部件功率流表达式,分析液压管路系统振动能量的传递情况,辨识传递振动能量的主要路径,得出了如下结论:
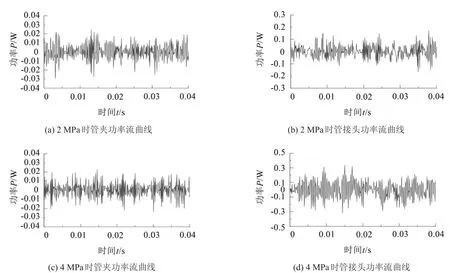
图11 不同压力下功率流曲线
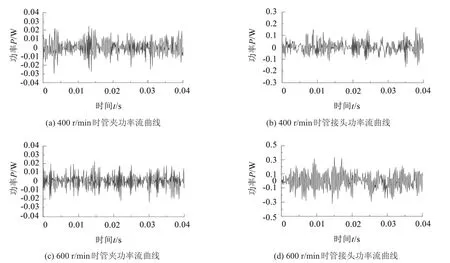
图12 不同转速下功率流曲线
(1)管路系统总体振动功率的传递呈现一定的波动性,并且力矩激励比单向激励作用更易使总体功率趋于稳定。
(2)通过有限元功率流法分析及实验分析得到:通过管接头输出的振动能量整体大于通过管夹传递的振动能量,即,管路-管夹-管接头这一传递路径为主要传递路径。
本文不足之处在于,作为液压管路振动传递路径的初步分析,研究中并未全面考虑管路内部流场问题以及压力脉动等其他激振源,且未将单根管路振动传递路径的传递规律扩展至真实设备内部的复杂管系研究。以后的研究工作将分析考虑在内部流场、压力以及多种激励源作用下的复杂管路振动规律,逐步完善相关研究工作。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国特种设备安全(2022年4期)2022-07-08
重型机械(2020年2期)2020-07-24
北京汽车(2020年3期)2020-07-15
民用飞机设计与研究(2020年1期)2020-05-21
上海节能(2020年3期)2020-04-13
凿岩机械气动工具(2017年3期)2017-11-22
凿岩机械气动工具(2016年2期)2016-11-11
汽车实用技术(2015年8期)2015-12-26
太空探索(2014年4期)2014-07-19
