鼻内镜联合影像导航系统在脑脊液鼻漏修补术中的应用
2018-02-28 22:37王佳说阎艾慧闫晓莹
中国医科大学学报 2018年2期
王佳说,阎艾慧,闫晓莹
(1. 中国医科大学附属第一医院耳鼻咽喉科,沈阳 110001;2. 大连医科大学附属第二医院全科医学科,辽宁 大连 116044)
脑脊液自破裂或破损的蛛网膜、硬脑膜和颅底骨流入鼻腔或鼻窦,再自前、后鼻孔或鼻咽部流出,称为脑脊液鼻漏,属鼻窦-颅底外科疾病。目前,除合并颅内其他病变外,经保守治疗无效的脑脊液鼻漏一般首选鼻内镜下修补[1-2]。
近20余年来,影像导航辅助鼻内镜手术在鼻窦-颅底外科的应用已经逐渐普及[3]。中国医科大学附属第一医院耳鼻咽喉科自2014年3月至2017年6月收集脑脊液鼻漏住院患者10例,以其术前鼻窦3D-CT、MRI检查资料为影像基础,应用FusionTMENT电磁型影像导航系统辅助鼻内镜下脑脊液漏修补术,取得了良好的治疗效果。
1 材料与方法
1.1 临床资料
回顾性分析2014年3月至2017年6月中国医科大学附属第一医院耳鼻咽喉科同一术者经治的10例脑脊液鼻漏患者的临床资料。其中,男7例,女3例,年龄36~60岁,平均48岁;外伤性脑脊液鼻漏3例,分别发生于伤后2个月 (2例) 和10年 (1例) ;自发性7例,病程15 d~2年。主要临床表现为单纯鼻腔流清水6例,伴视力下降1例,肺炎1例,脑膜炎2例;所有患者既往均无脑脊液鼻漏修补手术史。对鼻腔漏出液体行葡萄糖定量检查,确定为脑脊液。术中确定漏口位置。其中,额窦后壁1例 (图1A) ,筛窦1个漏口6例,2个漏口1例 (图2A) ;蝶窦1个漏口1例,2个漏口1例,共12侧,术后确定漏口大小为1 mm×1 mm~13 mm×13 mm。
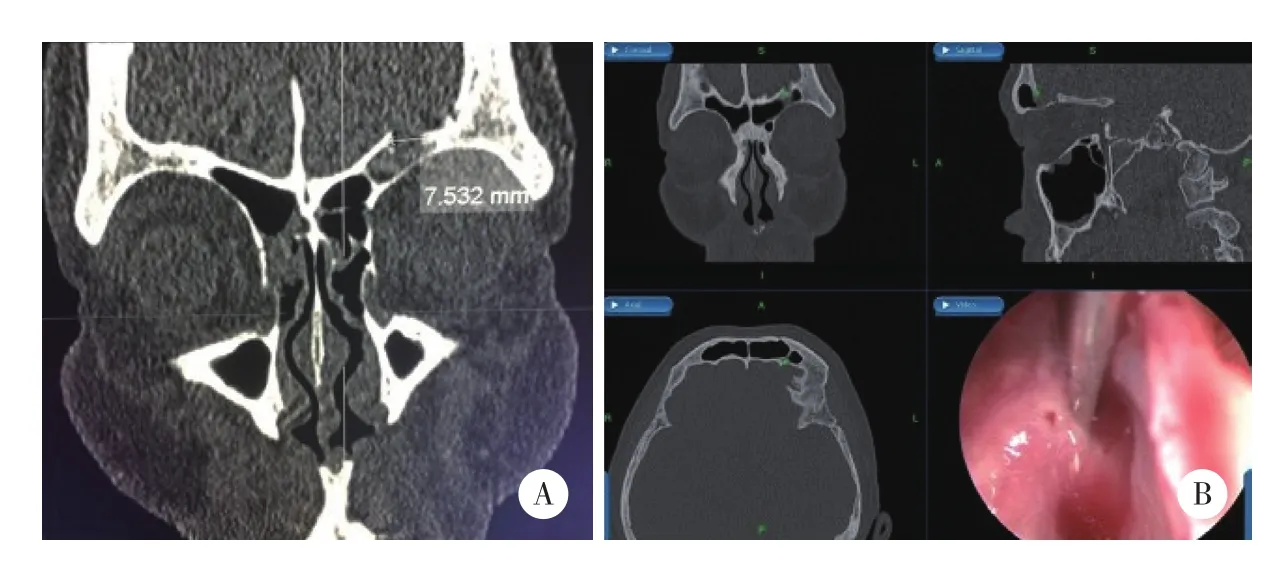
图1 左额窦脑脊液鼻漏Fig.1 Cerebrospinal rhinorrhea in left frontal sinus
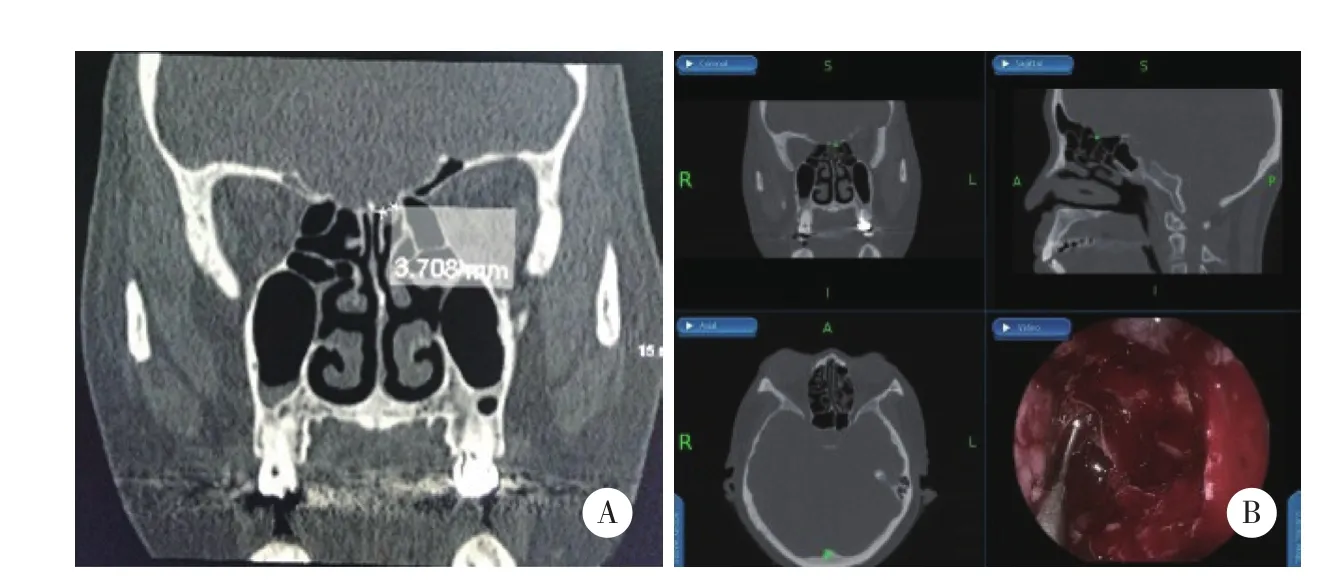
图2 双筛窦脑脊液鼻漏Fig.2 Double ethmoid cerebrospinal fluid rhinorrhea
1.2 术前影像学检查
1.2.1 高分辨鼻窦螺旋3D-CT:所有患者术前1周内均行鼻窦3D-CT检查,CT仪器型号为Toshiba640,扫描参数为标准Dicom格式,轴位连续扫描,层厚0.5 mm,90~150 层面,软组织窗,FOV 240 mm,范围上至头顶,下至上唇,前至鼻尖。
1.2.2 鼻窦增强 MRI:核磁共振机型号为GE MRI 3.0,层间距=层厚,与CT扫描保持相同的FOV,扫描范围基本一致。将以上检查结果录入导航系统计算机工作站。
1.3 影像导航系统
采用美国Medtronic公司的FusionTM电磁型影像导航系统,包括计算机工作站、显示器、定位系统、可追踪手术器械等。
1.4 手术治疗
1.4.1 手术方法:患者取仰卧位,采用全身麻醉,先行导航配准将追踪器固定在患者额部,电磁发射器固定于患者头部左侧上方约20 cm处,用注册探针进行注册,精确度以误差<1 mm为宜。手术入路方式及修补材料依据脑脊液漏口部位定位诊断选择,位于额窦的漏口,如单纯镜下暴露额窦困难,可联合额侧切开,导航指引开放并清理窦间隔,暴露漏口,测量骨质缺损直径 (图1A) ;位于筛窦的漏口,可先切除中鼻甲,联合导航系统指引,以探针在筛顶处探查,避免遗漏 (图2B) ;位于蝶窦的漏口,应注意避免损伤颈内动脉、视神经管等结构。确定漏口位置后,根据需要于漏口处创造新鲜创面,采用不同的修补材料及方法进行修补后,喷涂生物胶,外敷庆大霉素明胶海绵,鼻腔填塞碘仿纱条加固。
1.4.2 修补材料:包括颞肌肌肉浆、颞肌筋膜、自体脂肪组织、带蒂鼻中隔黏膜瓣、人工硬脑膜和生物蛋白胶。
1.4.3 术后处理:所有患者术后常规半坐位卧床7 d,静滴25%甘露醇250 mL,日2次降颅内压,应用可透过血脑屏障抗生素10 d,观察有无头痛及恶心、呕吐等颅内并发症,有无失明、血肿等眶内并发症;术后2~3周撤出鼻腔碘仿纱条填塞物,明胶海绵在术后4周逐渐清理。
1.5 随访及治疗效果评价
在出院后1周~6个月定期复查,6个月后随诊并长期随访,观察漏口愈合情况。
2 结果
本组10例患者,共12侧漏口,手术时间2.5~4 h,影像导航定位鼻内镜直视下均顺利、准确找到脑脊液漏口部位,所有病例修补均一次成功,至术后6个月复查时,鼻内镜下可见漏口修补处愈合生长良好。随访至今(0.5~40个月)均无并发症,无复发病例,总治愈率为100%。
3 讨论
导航系统在鼻窦-颅底内镜手术中的应用如今已并不罕见,实现了镜下术野与影像学检查资料的实时对应,使得内镜手术更加完善和安全[4]。
脑脊液鼻漏内镜修补手术的首要任务是准确定位漏口。术前3D-CT 可显示较明显的骨质缺损,而MRI水成像倾向于分辨液体和软组织[5]。导航系统的CT-MRI融合技术合并两者优势,能够更加清晰准确地显示漏口及其周围的情况。
在外伤性或医源性鼻漏中,经常伴有解剖结构移位或者改变,而自发性脑脊液鼻漏又通常伴有颅内压增高、骨质菲薄等情况,是术中遗漏或术后复发的主要原因之一[6]。另外,常有脑脊液鼻漏合并鼻窦及颅底其他病变,致使术野暴露欠佳。本研究应用导航系统,顺利定位漏口,针对疑似漏口结构可迅速分辨,未发生遗漏。可见,导航系统对漏口准确定位有着良好的辅助作用。SALEH等[7]也曾指出,影像导航系统在灵敏性和特异性方面均优于其他前颅底缺陷定位方法。
在开放鼻窦暴露漏口的过程中,要注意尽可能避免副损伤。颅底结构复杂,并且有视神经、三叉神经、颈内动脉等结构走行,操作时应格外谨慎。而内镜下开放额窦往往需要联合鼻外切口,创伤较大[8]。有学者[9]认为,导航辅助下可以实现仅从内镜下开放额窦,不需要额侧切开。而最近的1项meta分析则明确指出,导航系统的应用可以显著降低鼻内镜下复杂鼻窦手术颅内及眶内并发症的发生率[10]。本研究中手术途经敏感区域时,在导航系统上确认,最终所有病例均无颅内或眶内并发症的发生。此外,导航系统在提高手术安全系数的同时,相应减轻了术者所承受的精神压力,更利于手术的顺利进行[11]。
配准是导航系统实现手术精准定位的关键步骤,术中应随时根据内镜下已经确定的解剖结构来检验导航配准是否准确,及时纠正配准移位[12-13]。目前文献[14-15]所报道的单纯内镜下脑脊液鼻漏修补术的首次修补成功率可达87%~100%。本组的10例脑脊液鼻漏病例治愈率达到100%,治疗效果良好。
导航系统所带来的便利并不代表鼻内镜手术对术者专业水平要求的降低,反而要求术者具有过硬的手术操作技术以及完善的解剖知识储备[16]。其次,配准程序的教程在医师中尚未完全普及,若操作不熟练,在一定程度上会增加手术时间。值得注意的是,在实际工作中,针对疑似脑脊液鼻漏的病例,术前影像学检查参数应尽量兼容导航系统的运行要求[17]。从而减轻患者的经济负担并减少受辐射次数,避免不必要的医患纠纷。
[1] PSALTIS AJ,SCHLOSSER RJ,BANKS CA,et al. A systematic review of the endoscopic repair of cerebrospinal fluid leaks[J]. Otolaryngol Head Neck Surg,2012,147 (2) :196-203. DOI:10.1177/0194599812451090.
[2] LE C,STRONG EB,LUU Q. Management of anterior skull base cerebrospinal fluid leaks [J]. J Neurol Surg B Skull Base,2016,77 (5) :404-411. DOI:10.1055/s-0036-1584229.
[3] 韩德民,周兵. 鼻内镜外科学[M]. 北京:人民卫生出版社,2001:393-395.
[4] 韩德民,周兵,葛文彤,等.影像导航系统在鼻内窥镜手术中的应用[J]. 中华耳鼻咽喉科杂志,2001, (2) :126-128.
[5] 叶栋,沈志森,沈毅,等. 鼻内镜下脑脊液鼻漏成功修补关键因素分析[J]. 现代实用医学,2016,28 (4) :528-529.
[6] MIRZA S,THAPER A,MCCLELLAND L,et al. Sinonasal cerebrospinal fluid leaks:management of 97 patients over 10 years [J]. Laryngoscope,2005,115 (10) :1774-1777.
[7] SALEH H,AI BAHKALy S. Image-guided endoscopic repair of cerebrospinal fluid rhinorrhea by the bath plug grafting technique [J].Laryngoscope,2011,121 (5) :909-913. DOI:10.1002/lary.21355.
[8] ILLING EA,WOODWORTH BA. Management of frontal sinus cerebrospinal fluid leaks and encephaloceles [J]. Otolaryngol Clin North Am,2016,49 (4) :1035. DOI:10.1016/j.otc.2016.03.025.
[9] CITARDI MJ,AGBETOBA A,BIGCAS JL,et al. Augmented reality for endoscopic sinus surgery with surgical navigation:a cadaver study[J]. Int Forum Allergy Rhinol,2016,6 (5) :523-528. DOI:10.1002/alr.21702.
[10] VREUGDENBURG TD,LAMBERT RS,ATUKORALE yN,et al.Stereotactic anatomical localization in complex sinus surgery:a systematic review and meta-analysis [J]. Laryngoscope,2016,126 (1) :51-59. DOI:10.1002/lary.25323.
[11] THEODORAKI MN,LEDDEROSE GJ,BECKER S,et al. Mental distress and effort to engage an image-guided navigation system in the surgical training of endoscopic sinus surgery:a prospective,randomised clinical trial [J]. Eur Arch Otorhinolaryngol,2015,272 (4) :905-913. DOI:10.1007/s00405-014-3194-0.
[12] 文晶莹,甄宏韬,史丽丽,等. Fusion影像导航在鼻内镜手术中的应用体会[J]. 临床耳鼻咽喉头颈外科杂志,2015,29 (16) :1431-1433.
[13] CAVERSACCIO M,LANGLOTZ F,NOLTE LP,et al. Impact of a self-developed planning and self-constructed navigation system on skull base surgery:10 years experience [J]. Acta Otolaryngol,2007,127 (4) :403-407.
[14] yADAV yR,PARIHAR V,JANAKIRAM N,et al. Endoscopic management of cerebrospinal fluid rhinorrhea [J]. Asian J Neurosurg,2016,11 (3) :183-193.
[15] IRUGU DV,STAMMBERGER HR. A note on the technical aspects and evaluation of the role of navigation system in endoscopic endonasal surgeries [J]. Indian J Otolaryngol Head Neck Surg,2014,66 (Suppl 1) :307-313. DOI:10.1007/s12070-011-0380-x.
[16] GILAT H,RAPPAPORT Z,yANIV E. Endoscopic transnasal cerebrospinal fluid leak repair:a 10 year experience [J]. Isr Med Assoc J,2011,13 (10) :597-600.
[17] SHARMA GK,FOULAD A,SHAMOUELIAN D,et al. Inefficiencies in computed tomography sinus imaging for management of sinonasal disease [J]. Otolaryngol Head Neck Surg,2017,156 (3) :575-582.DOI:10.1177/0194599816685694.
猜你喜欢
临床与实验病理学杂志(2022年4期)2022-11-25
中国药学药品知识仓库(2022年10期)2022-05-29
家庭医药·快乐养生(2022年4期)2022-04-18
中医眼耳鼻喉杂志(2021年1期)2021-07-22
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中国临床医学影像杂志(2019年6期)2019-08-27
中国中西医结合耳鼻咽喉科杂志(2018年3期)2018-01-13
中国中西医结合耳鼻咽喉科杂志(2017年1期)2017-08-15
中国中西医结合耳鼻咽喉科杂志(2017年1期)2017-08-15
百科探秘·航空航天(2016年9期)2016-12-01