
2-RPU/SPR并联机构的多目标6Sigma稳健性优化
2018-03-05 12:32池腾腾刘庆阳周莎莎
机械设计与制造 2018年2期
王 南,池腾腾,刘庆阳,周莎莎
(河北工程大学 机械工程学院,河北 邯郸 056038)
1 引言
并联机构拥有高刚度、大承载力、误差无积累等良好特性,成功地应用到了各大工业领域[1-2]。尤其在包装工程领域拥有很高的应用空间,已经实际应用到填充、裹包、封口、计量和盖印等工序,以及与其相关的前后工序,如清洗、堆码和拆卸等,不仅生产效率被大大提高,而且减轻了人为劳动强度。并联机构的多目标优化设计,对设计出高品质并联机器人起到关键性作用[3]。国内外很多研究人员对并联机械多目标优化做了大量研究,例如,文献[4-5]用运动学和动力学全局条件数对机器人进行了多目标优化;文献[6-7]以驱动力、局部刚度和灵巧度三个性能指标,对并联机构的运动性能进行了多目标优化。但是这些优化都是确定性优化,没有把外界噪声干扰考虑在内,然而实际工作中,外界噪声干扰是必不可免的,尤其高精度包装机械更需将外界干扰考虑在内。
运用Isight软件强大的集成功能,对并联机构2-RPU/SPR[8]进行多目标6Sigma稳健性优化[9-10]。Isight能够很容易地将Pro/E、Matlab、Adams等软件集成到一起,研究人员可方便简单地进行多目标优化操作。6Sigma稳健性优化是考虑外界噪声干扰的一种非确定性动态优化设计,可大大提高机构的品质。将以2-RPU/SPR并联机构的工作空间、运动学灵巧度、刚度、最大和最小承载能力五个性能为指标,在考虑外界噪声干扰的前提下,设置约束条件,运用Matlab软件进行编程,并用Isight软件将其进行集成,用Isight软件的NSGA-Ⅱ方法对这五个目标函数进行6Sigma稳健性优化。将优化结果前后优劣对比,经6Sigma稳健性优化后获得理想结果,可用于高精度、高效率的包装机械的设计优化,为高精密领域的包装机械提供一种高效直观的优化设计方法。
2 2-RPU/SPR机构描述
2-RPU/SPR并联机构包括动平台、定平台以及三个支链,支链1和支链3依次由R副、P副和U副组成,其中R副平行于U副靠近定平台的轴线,且垂直于P副的轴线,且R1副与R3副相互平行,两支链的U副轴线互相平行。支链2依次由S副、P2副及R2副组成,R2副垂直于P2,且平行于U1副和U3副与动平台连接的轴线,如图1所示。
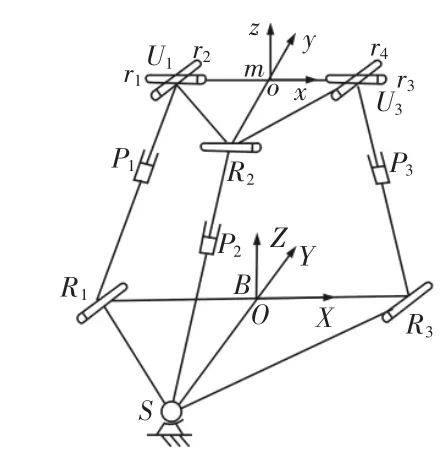
图1 2-RPU/SPR并联机构简图Fig.1 Sketch of 2-RPU/SPR Parallel Mechanism
3 优化性能指标的建立
3.1 2-RPU/SPR并联机构的工作空间
根据2-RPU/SPR并联机构的结构参数,利用蒙特卡洛边界搜索法,近似求解最大工作空间,用可行点数p,定量描述并联机构最大可达工作空间的大小。
3.2 2-RPU/SPR机构的局部性能指标
(1)运动学灵巧性局部指标

(2)局部刚度性能指标

式中:K=JTkJ;K—刚度矩阵;k—关节刚度矩阵。
(3)局部承载能力指标
最大、最小承载能力表达式

式中:G=JT
(4)2-RPU/SPR的全局性能指标
局部性能指标不能反映机构整体性能,需用全局性能指标来表达,如表1所示。
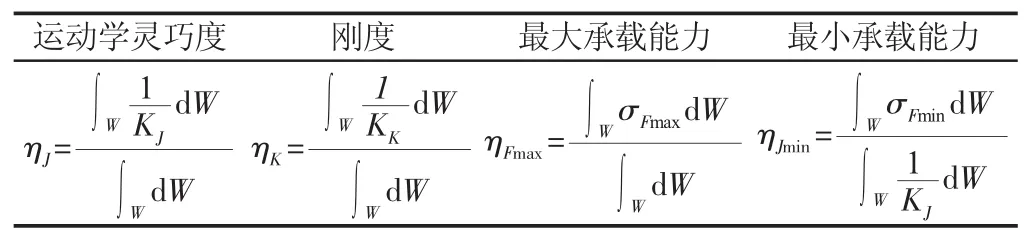
表1 全局性能表达式Tab.1 Global Performance Expression
式中:W—2-RPU/SPR的工作空间
ηJ、ηK、ηFmax和 ηFmin值越大,则各项性能指标越好,由于工作空间复杂难求,可先用蒙特卡洛方法求得工作空间的所有可行点数,接着计算所有可行点的局部性能指标,再求其均值,近似求得全局性能指标。
4 基于Isight的6Sigma稳健性分析
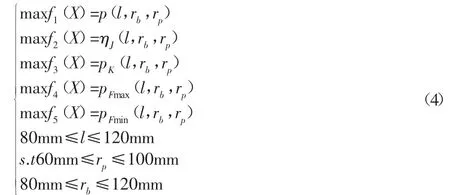
4.1 多目标优化模型的建立
2-RPU/SPR并联机构优化参数的初值设定:l=100mm,rp=80mm、rb=100mm。其中 l为三个杆长度,rp=U1U3=U1R2=R2U3、rb=R1S=SR3=R1R3,根据机构的约束条件和目标函数,建立多目标优化模型。
4.2 Isight集成Matlab进行确定性多目标优化
优化前后对比表,如表2所示。

表2 优化前后对比表Tab.2 Comparison Between Values Before and After Optimization
4.3 6Sigma稳健性分析流程
(1)运用Isight软件集成Matlab软件对优化解进行6Sigma稳健性分析,如图2所示。
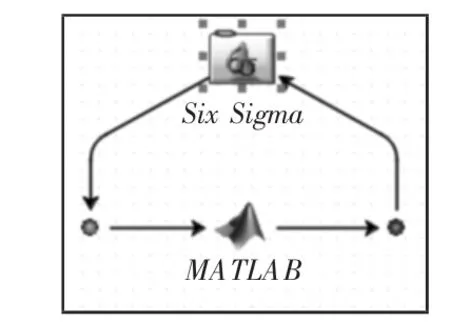
图2 6Sigma稳健性分析流程图Fig.2 Flow Chart of 6Sigma Robustness Analysis
(2)Isight软件进行6Sigma分析前,先作如下设置:①“分析
类 型 ”:“Reliability Technique”,“ 算 法 ”:“Mean Value Method”;②将参数变量和随机噪音的概率分布设置为正态分布,将变异系数均设为0.01,随机噪声为(200~300);③根据确定性优化解,设置工作空间、灵巧度、刚度、最大、最小承载能力的上限分别为 16000、0.0080、3.2E-5、185、1.22。
4.4 6Sigma稳健性分析结果

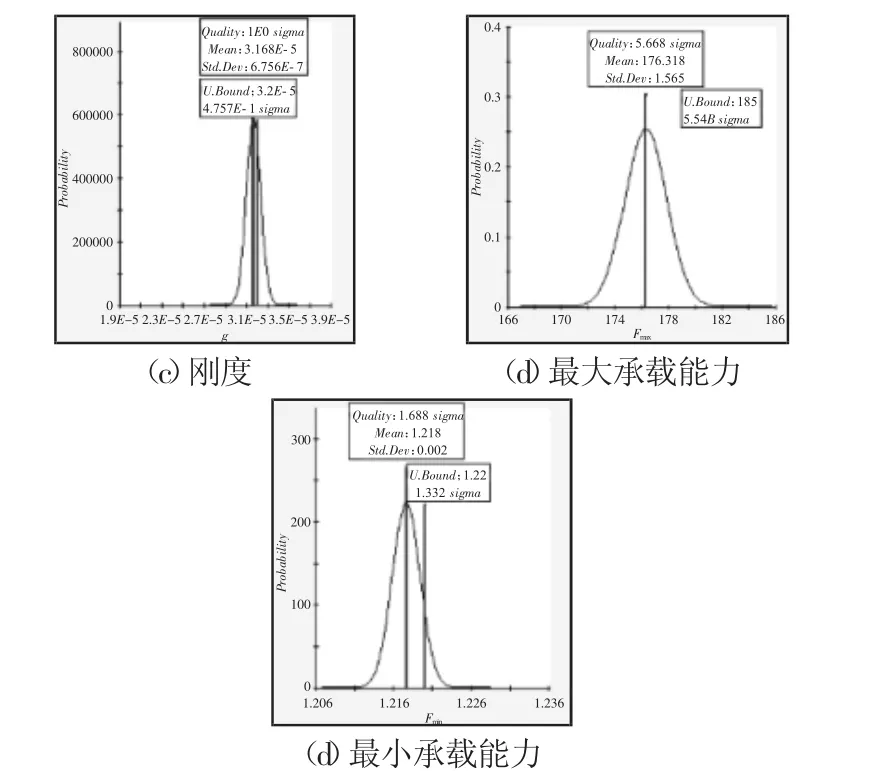
图3 6Sigma分析结果图Fig.3 6Sigma Analysis Result Graph
6Sigma分析后工作空间、运动学灵巧度、刚度、最大承载能力和最小承载能力的结果图,如图3所示。
由表3和图3可知,工作空间、运动学灵巧度、刚度、最大承载能力和最小承载能力的Sigma水平分别为5.419、0.728、1、5.668、1.688,只有工作空间和最大承载能力的Sigma水平接近6,但小于 6;可靠度分别为 58.556%、56.162%、64.346%、89.6%、68.354%,可靠度都没超过90%;可得整体稳健性较低,当Sigma水平小于6时,百万品中不良品的概率会明显提高,是不能满足高精度高水平的包装加工,所以有必要进行6Sigma稳健性优化。

表3 6Sigma分析结果Tab.3 6Sigma Analysis Results
5 基于Isight中NSGA-Ⅱ方法的6Sigma稳健性优化
5.1 6Sigma优化前的设置
(1)设置优化算法为NSGA-Ⅱ,种群大小为12,遗传代数为20;(2)定义约束的Sigma水平将响应变量工作空间、运动学灵巧度、刚度、最大、最小承载力的Sigma Level下限设置为66Sigma稳健性优化流程图,如图4所示。
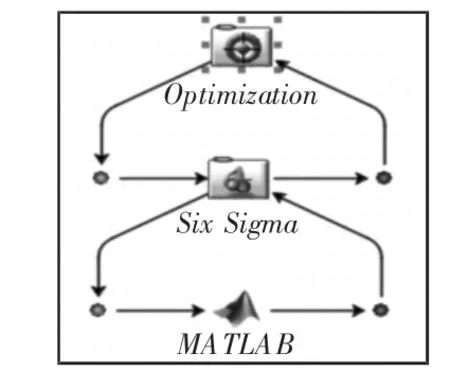
图4 6Sigma稳健性优化流程图Fig.4 Flow Chart of 6Sigma Optimization
5.2 6Sigma优化结果
经过6Sigma稳健性优化后工作空间、运动学灵巧度、刚度、最大承载能力和最小承载能力的结果图,如图5所示。6Sigma优化结果,如表4所示。

图5 6Sigma稳健性优化后结果图Fig.5 Results of 6 Sigma Robustness Optimization
由表4和图5可知,工作空间、运动学灵巧度、刚度、最大承载能力和最小承载能力的 Sigma 水平分别为 8、8、8、8、7.621,Sigma水平均大于6,可靠度都达到了100%,百万品中不良品的概率得到了大大的降低,与经过6Sigma稳健性优化前相比,优化后的各项性能指标得到了明显的提高。
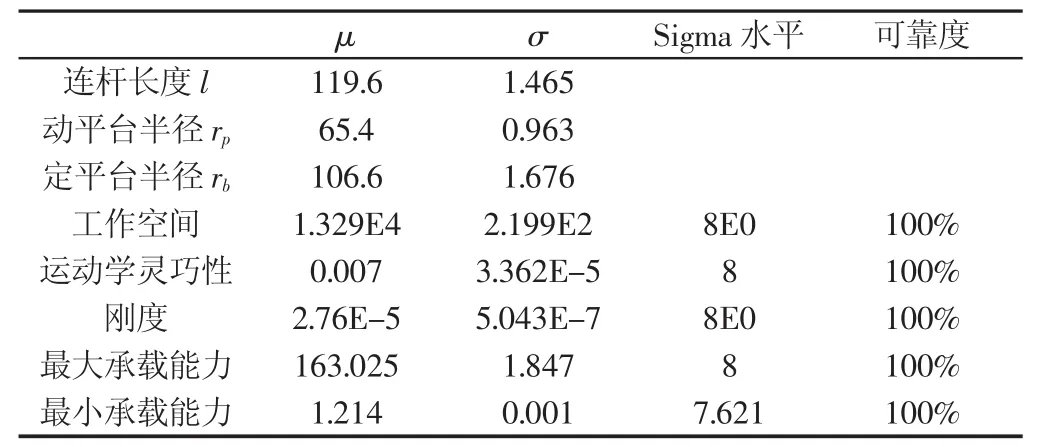
表4 6Sigma优化结果Tab.4 6Sigma Optimization Results
6 结论
(1)建立并联机构2-RPU/SPR的工作空间、运动学灵巧度、刚度、最大和最小承载能力五个性能指标,采用蒙特卡洛边界搜索法求得工作空间的所有可行点数,计算所有可行点的其他四个性能指标,求其均值,近似得到每个性能指标的整体性能指标。
(2)运用Isight软件集成Matlab先进行确定性多目标优化,得到优化解,然后在优化解和外界噪声干扰的前提下,运用Isight软件集成Matlab软件,采用Isight软件特有的NSGA-Ⅱ法对2-RPU/SPR并联机构的五个性能指标进行6Sigma稳健性分析及优化,优化结果前后优劣对比,获得6Sigma稳健性优化后的良好结果,机构的五个性能指标和稳健性得到了很大的提升。根据优化结果,并结合实际工况可选择最优设计参数,提高机构抗噪声干扰的能力。运用Isight软件进行6Sigma稳健性优化可用于高精度、高效率的包装机械的设计优化,为高精密领域的包装机械提供一种高效直观的优化设计方法。
[1]黄府,刘会议.基于雅可比矩阵条件数的并联机构参数优化[J].机械,2012(12):41-45.(HuangFu,LiuHui-yi.Parametersoptimizationofparallelmechanismbased on the condition of jacobian matrix[J].Machinery,2012(12):41-45.)
[2]郑魁敬,崔培,郭海军.3-RPS并联机构运动与静力特性分析[J].机械设计,2011(9):28-33.(Zhang Kui-jing,Cui Pei,Guo Hai-jun.Kinematics and static characteristics analysis of 3RPS parallel mechanism[J].Mechanical Design,2011(9):28-33.)
[3]刘海波.基于DELTA机构的高速并联装箱机器人[D].烟台:山东大学,2014.(Liu Hai-bo.A high-speed parallel packaging robot based on the DELTA mechanism[D].Yantai:Shandong University,2014.)
[4]Gosselin C M.The optimumdesign of robotic manipulators using dexterity indices[J].Robotics and Autono mous Systems,1992,9(3):213-226.
[5]Gosselin C M,Angeles J.A global performance index for the kinernatic optimization of robotic manipulators[J].Transaction of the ASME:Journal of Mechanical Design,1991,113(3):220-226.
[6]张艳伟,韦斌,王南.空间转动3-SPS-S并联机构运动学性能分析[J].农业机械学报,2012(4):212-215+207.(Zhang Yan-wei,Wei Bin,Wang Nan.Kinematic performance analysis of 3-SPS spatial rotation parallel mechanism[J].Transactions of the Chinese Society for Agricultural,2012(4):212-215+207.)
[7]王南,刘庆阳,周莎莎.基于Isight平台NSGA—Ⅱ方法的3-PRS并联机构多目标优化[J].机械设计与制造,2015(12):198-201.(Wang Nan,Liu Qing-yang,Zhou Sha-sha.Multi-objective optimization of 3-PRS parallel mechanism based on NSGA-Ⅱmethod of isight platform[J].Machinery Design&Manufacture,2015(12):198-201.)
[8]王南,周莎莎,许云斗.2-RPU/SPR并联机构位置正解及位置多解分析[J].机械设计与制造,2015(2):52-54.(Wang Nan,Zhou Sha-sha,Xu Yun-dou.Position forward solution and position analysis of 2-RPU/SPR parallel mechanism[J].Machinery Design&Manufacture,2015(2):52-54.)
[9]崔国华,周海栋,王南.基于Isight的3-UPS-S并联机器人机构多目标优化[J].农业机械学报,2013(9):261-266.(Cui Guo-hua,Zhou Hai-dong,Wang Nan.Multi-objective optimization of 3-UPS-S parallel mechanism based on isight[J].Transactions of the Chinese Society for Agricultural,2013(9):261-266.)
[10]周海栋.基于Isight的并联构型装备多目标优化设计研究[D].河北:河北工程大学,2014.(Zhou Hai-dong.Multi objective optimization design of parallel configuration equipment based on Isight[D].Hebei:Hebei University of Engineering,2014.)
[11]刘丽琴,张学良,谢黎明.6-RSS并联机器人机构多目标优化设计[J].太原科技大学学报,2012(4):281-285.(Liu Li-qin,Zhang Xue-liang,Xie Li-ming.Multi-objective optimization design for 6-RSS parallel robot mechanism[J].Journal of Taiyuan University of Science and Technology,2012(4):281-285.)
猜你喜欢
石油沥青(2021年1期)2021-04-13
河北省科学院学报(2020年1期)2020-05-25
空间科学学报(2020年4期)2020-04-22
重型机械(2019年3期)2019-08-27
商情(2019年3期)2019-03-29
制造技术与机床(2018年11期)2018-11-23
财讯(2018年22期)2018-05-14
考试周刊(2017年7期)2017-02-06
制冷技术(2016年4期)2016-08-21
现代商贸工业(2016年35期)2016-04-09
