
自平衡两轮电动车控制系统仿真研究
2018-03-05 12:32姚尚明
机械设计与制造 2018年2期
姚尚明,童 亮,杜 迪
(北京信息科技大学 机电工程学院,北京 100192)
1 引言
随着汽车工业的发展,能源问题和交通问题越来越严重,在这样的背景下,自平衡两轮电动车应运而生。无刷直流电机(BLDC)由于具有体积小、高效节能、转动惯量小、调速范围宽、结构简单等优点,使得其尤其适用于自平衡两轮电动车。自平衡两轮电动车由于具有快速的灵活性和机动性,特别在拥挤的城市中更能体现其灵活性与方便。由于其具有转弯灵巧、无刹车系统、体积小巧等特点,这也使得自平衡两轮车特别适用于空间狭小、地形复杂以及汽车难以通过的场合[1-3]。由于电力电子、电机控制技术以及永磁材料的发展,直流无刷电机得以快速发展。其相对于传统的直流有刷电机,创新性的采用了电子换向器,舍弃了传统的机械换向,从而提高了电机的效率、控制精度以及电机的使用寿命,而且普通的直流电机具有的优秀的机械品质尚存,因此大规模适用于伺服系统以及机器人等控制领域[4-6]。
国内外的许多学者都对自平衡两轮电动车系统的平衡控制算法进行过大量的理论与实践研究[7],比如某大学的科研人员采用了传统的PID控制算法、某大学的科研人员采用了神经网络PID控制算法、某大学的科研人员采用了滑模变结构算法;著名的Segway公司采用了模糊控制算法,从结果上看以上方法都对自平衡两轮小车取得了良好的控制效果,然而不足的是,以往的研究成果中只涉及到控制算法对自平衡两轮车机械模型的控制,但没有将电机模型和自平衡两轮车机械模型联合起来。文章通过使用MATLAB软件下的SIMULINK仿真环境搭建了自平衡两轮车的机械模型和无刷直流电机的本体模型以及其控制系统,设计了无刷直流电机转速和电流双闭环控制系统,并分别采用PID和模糊控制作为系统的平衡控制算法,设计了自平衡两轮电动车的机械模型和无刷直流电机驱动模型的联合平衡控制系统,并对比分析了PID控制和模糊控制算法的仿真结果。并通过改变车身的质量和车身质心的高度来验证模糊控制器的鲁棒性。
2 自平衡两轮车数学模型
2.1 速度计算
在建立系统数学模型时,使用拉格朗日方程的首要任务就是求出系统的总动能,因此求得自平衡两轮车运动时的所有方向上的速度变的刻不容缓。自平衡两轮车的机械结构与受力分析,如图1所示。
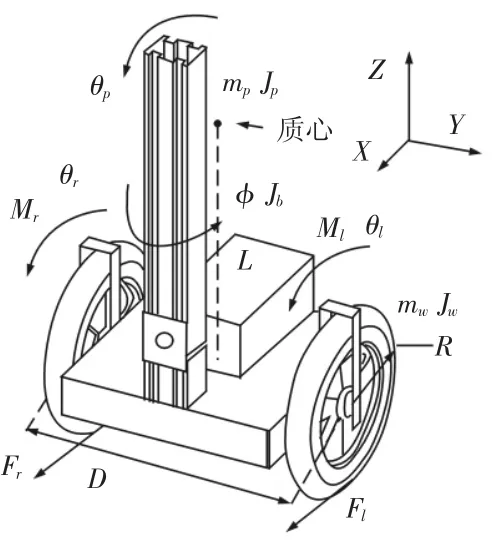
图1 自平衡两轮车机械结构与受力分析Fig.1 The Structure and Force Analysis of TWSBEV
很容易得到车轮的速度等于车轮角速度与车轮半径的乘积,即:Vl=θ˙lR Vr=θ˙rR (1)
式中:Vl、Vr—左、右车轮速度;θl、θr—左、右车轮转角;R—车轮半径。
由车身倾斜而引起的车身速度的变化分解到X、Y、Z方向上可表示为:

式中:θp、φ—车身倾角和车身转动角;L—车身质心到轮轴的距离。
由车身旋转而引起的车身速度的变化分解到X、Y方向上可表示为:Vx2=-φ˙Lsinθpsinφ (5)

由车轮滚动而引起车身速度的变化分解到坐标轴可表示为:

通过左右两车轮的角速度变换可以得到车身转弯角:

式中:D—左、右车轮之间的间距。
2.2 能量计算
车身动能:
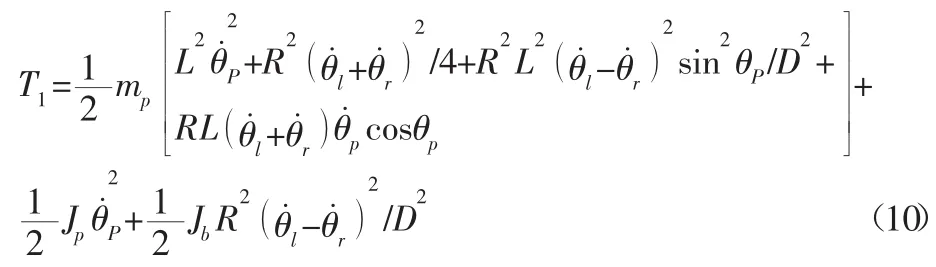
车轮动能:

系统总动能:T=T1+T2
式中:mp—车身质量;mw—车轮质量;Jp—车身绕轮轴的转动惯量;Jb—车身绕z轴的转动惯量。
2.3 应用拉格朗日方程建模
同理在θl方向上应用拉格朗日方程可以得到:

式中:Qθp、Qθl、Qθr—θp、θl、θr方向上的广义力。
2.4 基于MATLAB的自平衡两轮车机械系统模型
自平衡两轮车基于MATLAB/SIMULINK的机械本体系统模型的封装图,如图2所示。其中,系统的输入为左、右两无刷直流电机电机的输出转矩,输出为左、右轮的速度和转角以及车身的速度和倾角。

图2 自平衡两轮车机械模型封装Fig.2 The Mechanical Model Mask of TWSBEV
3 无刷直流电机驱动系统建模
3.1 无刷直流电机的数学模型
3.1.1 定子电压方程
基于一定的假设条件,下式可表示无刷直流电机的定子电压平衡方程[8],即:

式中:ua,ub,uc;ea,eb,ec;ia,ib,ic—三相定子电压(V)、三相定子的反
电动势(V)、三相定子相电流(A);La,Lb,Lc—三相定子的自感
(H);Lab,Lac,Lba,Lbc,Lca,Lcb—三相定子绕组间的互感(H);Ra,
Rb,Rc—三相定子绕组的各相电阻(Ω);P—微分算子(d/dt)。
在电机360°电角度里,转子的磁阻是不随转子的位置变化而变化的,这是由电机的结构决定的,假设电机三相绕组是对称的,则:La=Lb=Lc=L,Lab=La=Lba=Lbc=Lca=Lcb=M;Ra=Rb=Rc=R。
因为无刷直流电机是三相对称的,则ia+ib+ic=0,并且Mib+Mic=-Mia,则(16)式可以改写为:

3.1.2电磁转矩方程
无刷直流电机定子绕组的输入功率与电机所产生的电磁转矩之间的关系为:eaia+ebib+ecic=Teω (18)
式中:ω—电机的机械角速(rad/s)。
3.1.3 电机运动方程
式中:B—阻尼系数(N/m/s/rad);J—电机的转动惯量(kg/m2);TL—负载转矩(N/m)。
3.2 基于MATLAB的BLDC仿真模型的建立
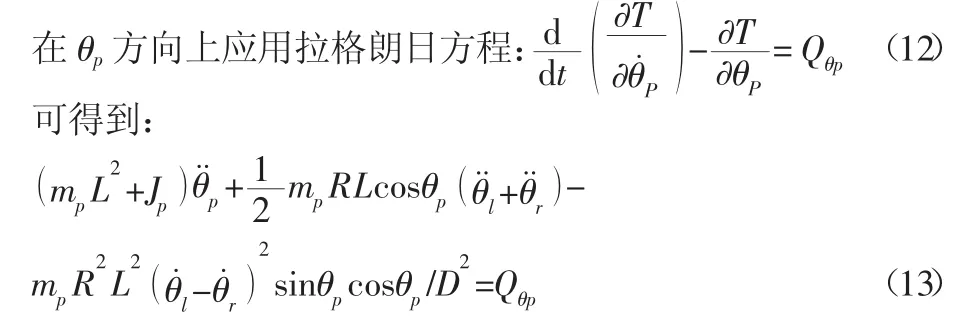
利用SIMULINK软件里自带的工具箱SimPowerSystems所提供的丰富的模块库功能,通过研究分析无刷直流电机的数学模型,建立了BLDC的驱动仿真模型。其系统设计框图,如图3所示。
图3 BLDC驱动系统设计框图Fig.3 The Design Picture of BLDC Drive System
其中转速环采用PI控制,电流环则采用滞环控制。把以上各功能模块组合起来即可得到无刷直流电机驱动系统仿真模型。
4 自平衡两轮车车身倾角-车轮转速双闭环PID控制器设计
我们知道当自平衡两轮电动车做标准的直线运动时,因为左右两轮同时运动而且不存在转弯运动,因此我们可以将两个车轮近似等效为一个车轮,这样就大大的减小了系统的复杂程度,即可以得到将上节中建立的精确模型线性化。我们可以权且当|θp|≤10°时,sinθp≈θp、cosθp≈1,而且都可以近似等于 0,代入式(13)~式(15),可得系统的等效模型为:

将已知参数代入上式,并进行拉氏变换即可得到系统的传

借鉴倒立摆的控制策略,自平衡两轮电动车的内、外环反馈均可采用PD控制器。设计的自平衡两轮电动车的控制系统,如图4所示。
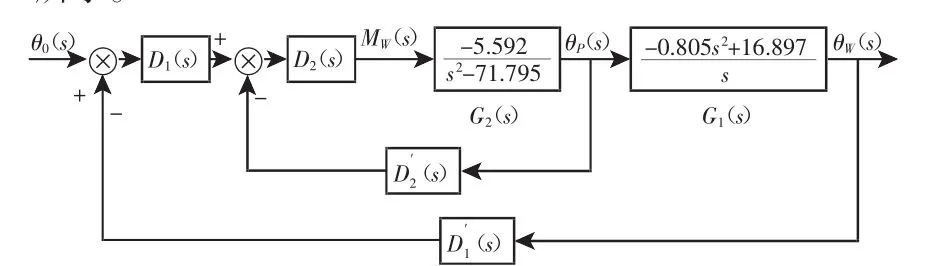
图4 PID控制系统Fig.4 The PID Control System
自平衡两轮电动车在运动时有两种控制目标即车身倾角是可控的以及车轮速度是可控的,也就是车身倾角恒定以及车轮速度恒定。在自平衡两轮车运动过程中,倾角可控是车轮速度可控的基础,因此可以选择车身倾角为系统的内环,而车轮转速为系统的外环。从而可以搭建自平衡两轮电动车系统的双闭环PID控制原理图。
5 自平衡两轮车模糊控制器设计
5.1 模糊控制器简介
模糊控制器的原理,如图5所示。从图5中可知模糊控制器主要由控制规则库、模糊推论机制、模糊化模块、解模糊模块组成[9]。
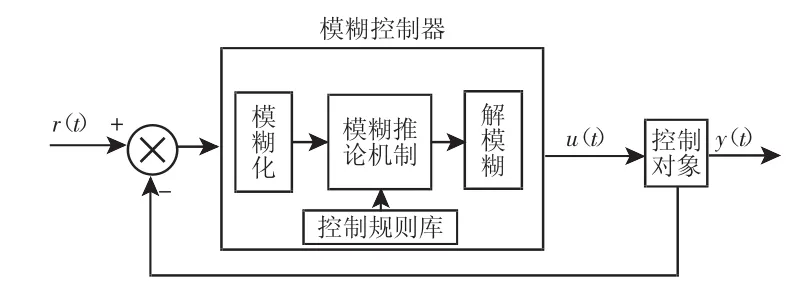
图5 模糊控制原理图Fig.5 The Schematic of Fuzzy Control
5.2 车身倾角模糊控制器设计
设定模糊控制器的输入变量为车身倾角与给定值之间的偏差E和Ec,输出变量U为无刷直流电机负载转矩[10]。根据以往经验,模糊控制器各变量的论域设置为:
角度偏差 E:[-0.3,0.3];
角度偏差变化率:[-1.5,1.5];
输出转矩:[-18,18]
制定自平衡两轮车模糊规则,如表1所示。在上述自平衡两轮车机械模型和无刷直流电机驱动模型的基础上,搭建自平衡两轮电动车系统模糊控制器原理图(图略)。对自平衡两轮电动车进行仿真控制。
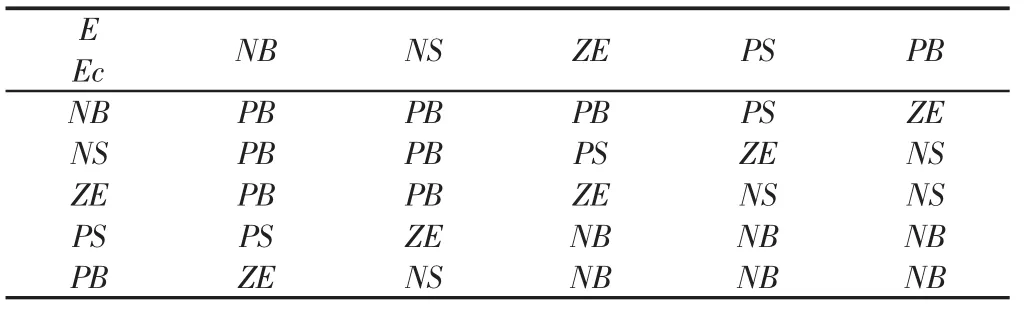
表1 模糊规则Tab.1 Rules of Fuzzy Controller
6 系统仿真分析
试验中所需的物理参数,如表2所示。

表2 所需物理参数Tab.2 Physical Parameters
在MATLAB/SIMULINK环境下中分别建立系统的PID控制算法和模糊控制算法的仿真模型并进行仿真实验。在自平衡两轮车处于平衡状态下假设给定平衡车车轮的转速为0.5rad/s,之后观察示波器中两轮车系统车身倾角和车轮转速的响应情况,其仿真的结果图,如图7~图9所示;当采用模糊控制器作为自平衡两轮车的平衡控制器时,改变车身的质量和车身质心高度,观察系统的响应情况。

图6 PID控制器仿真结果Fig.6 The Simulation Result of PID Controller

图7 模糊控制器仿真结果Fig.7 The Simulation Result of Fuzzy Controller
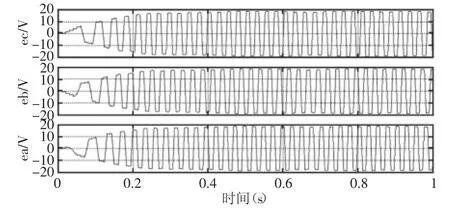
图8 BLDC三相反电动势波形Fig.8 The Wave Shape of Back Electromotive Force
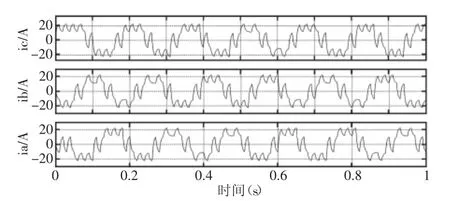
图9 BLDC三相电流波形Fig.9 The Wave Shape of Current
从仿真结果可以得出以下结论:(1)在图8中,当自平衡两轮车系统采用PID控制作为系统的平衡控制算法时,自平衡两轮车系统在10s左右可以基本恢复到平衡位置,车轮速度可以在8s左右基本跟进到给定值;而在图9中,当采用模糊控制器作为自平衡两轮车系统的平衡控制算法时,系统在5s左右可以恢复到平衡位置,车轮速度可以在6s左右便基本上跟进到给定值。从以上数据可以看出,当采用模糊控制器时,车身倾角和车轮转速这两项指标随时间变化的响应情况都要优于转速-电流双闭环PID控制器,因此说明模糊控制器更加适合作为自平衡两轮电动车系统的平衡控制算法。(2)设计的模糊控制器作为对车身质量的变化具有很好的鲁棒性。分别选mp=100kg,mp=55kg,mp=25kg进行仿真实验,车轮转速在6s左右基本跟进到给定值;当mp=100kg时,车轮转速的变化幅度和波动最大,mp=55kg时次之,mp=25kg最小,说明车身质量越大,车轮转速的变化幅度和波动越大。车身倾角在5s左右基本恢复到平衡位置,而且当mp=100kg时,车身倾角的变化幅度和波动明显大于当车身质量为55kg和25kg,说明车身质量越大,车身倾角的变化幅度和波动越大。(3)设计的模糊控制器对车身质心高度的变化具有一定的鲁棒性。分别选取L=0.5m,L=0.3m,L=0.1m进行仿真实验,车轮转速在7s左右基本跟进到给定值;当L=0.5m时,车轮转速的变化幅度和波动最大,L=0.3m时次之,L=0.1m时最小,说明车身质心高度越大,车轮转速的变化幅度和波动越大。车身倾角在8s左右基本恢复到平衡位置;而且当L=0.5m时,车身倾角的变化幅度和波动最大,L=0.3m时次之,L=0.1m时最小,说明车身质心高度越高,车身倾角的变化幅度和波动越大。(4)设计的模糊控制器对车身质量与车身质心高度的变化具备一定的鲁棒性。相比之下,对于车身质量的变化,系统能够很好的适应,但对于车身质心高度的变化,系统的控制调节能力较弱,但依然能够满足生活中的实际需要。(5)控制系统中无刷直流电机的仿真曲线,如图8、图9所示。从图中可以看出,三相反电动势的波形基本上呈梯形波形式,电流波形基本上呈方波形式,且两者都较为理想,说明了文中设计的直流无刷电机的驱动系统方案是可行的。
7 结束语
自平衡两轮电动车由于具有非线性度高、欠驱动以及强耦合性等特点,因此其本身就是一种很不稳定的系统,其结构非常类似于常见的一阶倒立摆系统。因此必须对其施以适当的控制算法才能使其达到平衡稳定的状态。文中创新性的联合了自平衡两轮电动车机械模型和无刷直流电机(BLDC)驱动系统模型,分析比较了当PID控制算法和模糊控制算法分别作为系统控制策略时对系统的控制效果;并通过改变车身质量和车身质心高度来验证模糊控制器的鲁棒性。仿真结果表明模糊控制器更适合于自平衡两轮电动车系统,可以对系统有很好的控制效果,而且也对系统具有很好的鲁棒性,这为以后更深入的研究自平衡两轮车系统提供了帮助。
[1]孙阳,辛颂,雷荣芳.双轮自平衡小车的动力学建模与分析[J].硅谷,2014(5):170-171.(Sun Yang,Xin Song,Lei Rong-fang.The dynamic modeling and analysis of self-balanced two-wheeled vehicle[J].Silicon Valley,2014(5):170-171.)
[2]段其昌,翁珏,李丰兵.一种新的两轮自平衡电动车控制方法[J].计算机应用研究,2013(12):3678-3681.(Duan Qi-Chang,Weng Jue,Li Feng-bing.Sort of novel control method for two wheels self-balancing scooter[J].Application Research of Computer,2013(12):3678-3681.)
[3]Chih-Chen Yih.Sliding-Mode Velocity Control of a Two-Wheeled Self-Balancing Vehicle[J].Asian J Control,2014(166).
[4]Ionel D M,Eastham J F,Betzer T.Finite element analysis of a novel brushless DC motor with flux barriers[J].IEEE Trans on Magnetics,1995,31(6):3749-3751.
[5]殷云华,郑宾,郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模真方法[J].系统仿真报,2008(2):293-298.(Yin Yun-hua,Zheng Bin,Zheng Hao-xin.A method for modeling and simulation of Brushless DC motor control system based on Matlab[J].Journal of System Simulation,2008(2):293-298.)
[6]解后循,高翔,赵世婧.基于S-函数的无刷直流电机双闭环速度控制系统仿真[J].拖拉机与农用运车,2009(1):52-55.(Xie Hou-xun,Gao Xiang,Zhao Shi-jing.Simulation of double loop control system of BLDCM based on S-Fuction[J].Tractor&Fam Transporter,2009(1):52-55.)
[7]刘二林,姜香菊.基于PD算法的两轮自平衡车直立控制[J].自动化与仪器仪表,2015(1):203-206.(Liu Er-lin,Jiang Xiang-ju.Upright control of self-balancing two-wheeled vehicle on basis of PD control[J].Automation and Instrumentation,2015(1):203-206.)
[8]孙环阳,黄筱调,洪荣晶.永磁同步电机矢量控制系统的仿真研究[J].机械设计与制造,2010(3):122-124.(Sun Huan-yang,Huang Xiao-tiao,Hong Rong-jing.simulation research of Permanent magnet synchronous motor vector control system[J].Machinery Design&Manufature,2010(3):122-124.)
[9]肖文健,李永科.基于模糊控制的智能车系统设计[J].电子设计工程,2012(18):158-160.(Xiao Wen-jian,Li Yong-ke.Design of intelligent vehicle systems based on photoelectric sensor[J].Electronic Design Engineering,2012(18):158-160.)
[10]李明爱,焦利芳,乔俊飞.自平衡两轮机器人的分层模糊控制[J].控制工程,2009(1):80-82+94.(Li Min-gai,Jiao Li-fang,Qiao Jun-fei.Hierarchical fuzzy control for self-balancing two-wheel robots[J].Control Engineering of China,2009(1):80-82+94.)
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
舰船科学技术(2015年8期)2015-02-27
