
面向知识的空间机构创新设计过程模型
2018-03-05 12:33钱志远
机械设计与制造 2018年2期
刘 超 ,赵 武 ,尚 万 ,,钱志远
(1.四川大学 制造科学与工程学院,四川 成都 610065;2.上海市空间飞行器机构重点实验室,上海 201108)
1 引言
在新的航天任务需求牵引下需要新型的空间机构来完成多种空间任务。而空间环境恶劣、机构安装和工作空间差异性较大、体积重量比要求极为严格、系统精度和工作寿命以及可靠性要求高,考虑到概念设计阶段空间机构创新设计知识离散性、流动性、模糊性、复杂性的特点,如何整合与空间机构创新设计相关的技术资源,运用相关知识,并建立规范的创新设计过程模型,引导设计者有效使用创新方法,帮助设计者融合使用多领域知识,从而高效地完成空间机构的创新设计已成为当前迫切需要解决的问题。目前国内外研究主要涉及四个领域:产品创新设计的研究[1];产品创新设计过程模型的研究;基于知识的产品设计的研究[2];空间机构创新设计的研究[3]。然而针对于工作环境复杂、安全性要求极高的空间机构都有一定的局限性。针对空间机构涉及知识对创新设计过程进行研究,分析知识支撑概念设计全过程,提出面向知识的空间机构创新设计过程模型,为空间机构设计人员进行创新设计提供理论依据。
2 知识的表达与应用
2.1 空间机构创新设计知识表达
针对空间机构创新设计过程的不同阶段,对知识的使用和要求有所区别,对于同一个知识点,要对其进行详细程度不同的表达。引入知识粒度[4]表达空间机构创新设计知识,知识粒度是一条知识对其知识信息内容和相关信息关系描述的详细程度。根据空间机构创新设计中使用知识的详细程度,将知识粒度划分为粗粒度知识,中粒度知识,细粒度知识,精细粒度知识。以原理效应类知识为例,需要表达到中到细粒度知识的程度,采用本体五元组来表示如下式:D=(N,C,T,F,G)
式中:N—原理名称;C—原理类型;T—原理文字描述;F—原理公式;G—原理说明图形或者实例。
空间机构创新设计模型是创新设计方法引导设计者运用知识的过程,将空间机构创新设计每一阶段对应的知识,如表1所示。
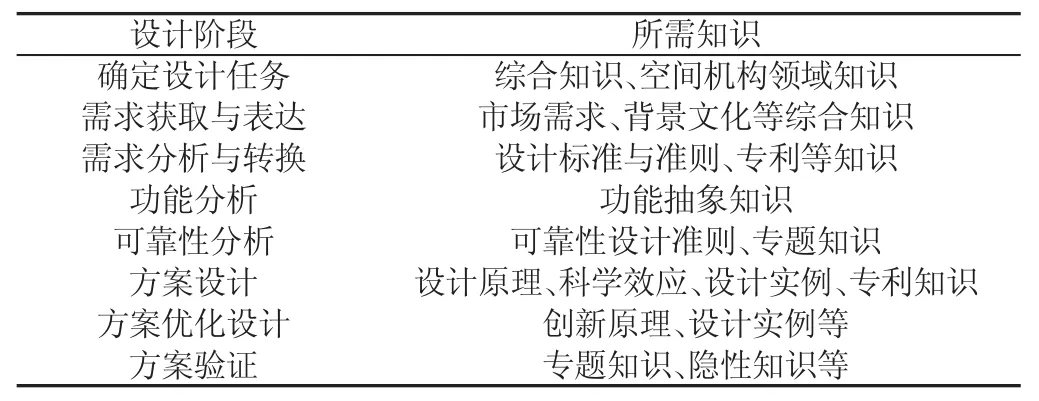
表1 空间机构创新设计对应的知识Tab.1 Knowledge of Spatial Mechanism Innovation Design
2.2 创新设计知识组织应用模型
在知识组织管理时采用文献[5]提出的基于本体的FPBS模型,将空间机构创新设计知识按照功能、原理效应、行为、结构、约束及准则,建立一系列独立的知识体,将每一个个体知识按照FPBS模型建立映射关系,建立知识个体之间的映射库,对知识进行联系和融合,实现对知识的组织管理,进而提出本体语义搜索的知识应用模型,如图1所示。

图1 空间机构创新设计知识应用模型图Fig.1 Model Diagram of Knowledge Application
该应用模型分为用户层、搜索层、本体层和数据层四个层次,主要包含两个关键技术,一是设计知识的本体组织技术,另一个是对设计知识的本体语义搜索及推理技术。用户层为设计者提供知识库操作的接口,提供输入查询条件和实现查询结果的界面。搜索层根据设计任务关键字,基于语义本体进行同义扩展、泛化、联想等智能化的搜索,获得所需设计本体知识。本体层将各种知识按照FPBS模型构建知识本体和功能本体,通过知识识别和处理工具进行抽象和封装,实现各知识本体间相关性连接,为知识本体的搜索建立有效的知识库。数据层由空间机构创新设计各阶段所需知识分别建立的知识库构成,另有填充知识的接口。这些知识的丰富性和规范性是支持空间机构创新设计的基础。
空间机构创新设计知识的应用包含本体解析和查询两个方面。本体解析主要是对自然语言和搜索关键内容进行转化,使查询结果更加符合设计者的需求。本体知识查询,是对知识按照本体解析后,对知识映射库中,寻找搜索内容对应的关系,根据关系确定的语义网络,找到语义网络中的相关的知识个体。查询分为主动查询和被动查询,主动查询是设计者根据需求找到相对应的知识,语义网络就可以校正自然语言表达的非规范性,同时也不会遗漏有效信息。被动查询是结合创新方法主动给设计者推送相关知识。
3 基于知识的空间机构创新设计过程模型
在知识应用模型的基础上提出空间机构创新设计过程中知识的运行机制,从设计任务到理想方案全过程中,涉及到所有空间机构知识可以通过本体搜索应用模型直接连接到各知识库、扩展知识通过网络web搜索,创新方法策略作为方法层为设计人员提升创新思维和能力,如图2所示。
方法层是在空间机构创新设计过程模型中的创新设计方法及策略,为设计者提供创新方法,引导设计者寻找相关知识进行创新设计。在空间机构创新设计过程中按照设计阶段对创新方法进行分类,让设计者利用创新方法从已建立好的多领域知识库中提取知识。知识层为设计者提供知识的支撑,在空间机构创新设计知识分类、表达及组织管理的基础上,结合知识运用模型,通过知识搜索的方式,知识层将知识呈现在设计者面前,由设计者在创新设计方法引导下选择知识。在知识支撑引导设计模型基础上,建立基于知识的空间机构创新设计过程模型,运用流程,如图3所示。
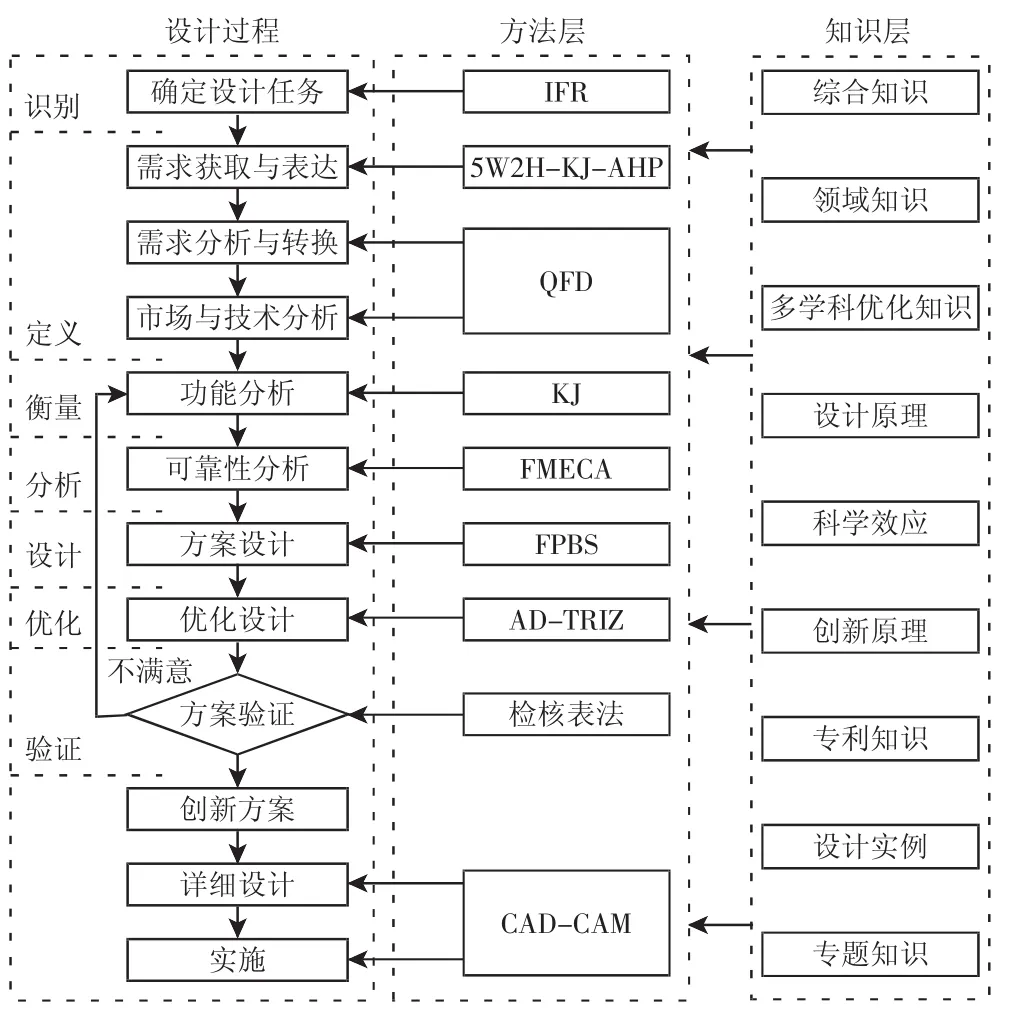
图3 基于知识的空间机构创新设计过程模型Fig.3 Process Model for Innovation Design Based on Knowledge
(1)针对空间机构航天任务、性能、可靠性、寿命、工作环境和接口关系等,设计者首先确定产品的理想解集合(IFR),运用相关知识理想化定义问题确定设计任务;(2)在市场需求、背景文化等综合知识支撑下利用5W2H方法获取用户需求[6],利用文献[7]中的KJ方法进行需求整理与归类,利用AHP方法进行需求权重排序[8],AHP法能够在使用KJ法得出的层次结构模型上,解决多目标的复杂决策问题,以及KJ法中无法确定需求之间的相对重要性的问题;(3)利用QFD方法运用设计标准和空间机构设计准则等知识进行需求分析与转换,并结合专利知识和其他相关技术知识分析设计的市场竞争力和技术竞争力;(4)利用KJ方法运用功能抽象知识和设计实例来分析定义空间机构的功能,按重要程度分为基本功能和辅助功能;按性质分为实用功能和外在功能;利用FMECA方法运用空间机构可靠性及安全性准则类知识来分析设计的可靠性[9],并提出相应改进措施;(5)利用FPBS方法,通过科学效应库、专利库获得实现空间机构功能的科学效应、原理、领域知识以及设计实例和专利等知识,进行空间机构创新方案设计;(6)利用AD与TRIZ集成的方法[10],AD用来分析产品功能要求,发现技术问题的冲突,TRIZ解决冲突,运用创新原理与设计实例等知识完成空间机构创新方案的优化设计;(7)最后利用检核表法运用空间机构设计准则及约束类知识完成空间机构的创新方案验证,进行设计校核、仿真实验、设计修改等,最终得到空间机构创新设计方案。
4 示例
为更好地展示所述基于知识的空间机构创新设计过程模型,下面以关于空间机器人手爪的已授权发明专利作为一个简单示例。
4.1 分析确定设计任务
最终目的是设计一种新型灵巧空间机器人手爪,完成空间所需任务。而最终理想方案是完全具备人手的功能;目前的障碍是手指并不能像人手那样灵活,导致的结果是无法完成任务所需的某些功能;克服障碍的条件是存在一种特殊手指结构;可以利用的资源是手指本身。
4.2 需求获取与表达
用AHP法对用户需求分析处理,判断相应的重要程度,得到用户需求重要度排序如下:完成空间多种任务(0.269807),良好的环境适应性(0.134900),手爪灵活(0.134900),寿命长、可靠性高(0.118783),安全、低风险(0.118783),工作效率高(0.065382),能耗少(0.065382),体积小、重量轻(0.059382),成本低(0.032686)。
4.3 需求分析与转换
采用QFD方法建立需求转换质量屋,裁剪屋顶,如图4所示,得到各项技术特征的重要度,按照权重大小排序如下:机能多样性(3.68),作业性(3.36),自适应性(3.2),结构布局(3.17),外观(2.97),材质(2.80),耐环境性(2.76),力学特性(2.64),自动化(1.78),经济性(1.69)。

图4 需求转换质量屋Fig.4 House of Quality for Demand Conversion
4.4 功能分析
结合空间机构力矩裕度、精度分配、机构非线性、阻尼控制、热匹配与空间润滑等知识,确定灵巧多功能空间机器人手爪的功能:抓取、夹持、捕获以及捕获目标物,同要求手爪传动平稳,控制简单,在执行的时候稳定、灵活,具有良好的适应性。同时要求缩小体积、减轻重量,手爪的结构组成简单紧凑。
4.5 可靠性分析
灵巧多功能空间机器人手爪功能可靠性FMECA分析结果,如表2所示。得到上述每个功能对应的改进措施和设计要求。重点考虑增力、柔性设计、结构布局以及冗余设计。

表2 功能可靠性FMECA分析Tab.2 FMECA Analysis of Functional Reliability
4.6 方案设计
多功能空间机器人手爪的设计包含传动方式、驱动方式、控制反馈方式、联接支承方式以及执行机构的设计与选择。结合特殊工作环境,采用体重比更小的步进电机以及工作稳定性能更高的滚珠丝杆传动结构;末端执行手指设计为便于抓持和捕捉形状不规则物体的自适应调整的开合机构;手掌与手指配合完成空间目标物的定位;在执行末端手指上设置力、位移传感器,实现简单的闭环控制;手爪的材质采用铝合金,如图5所示。
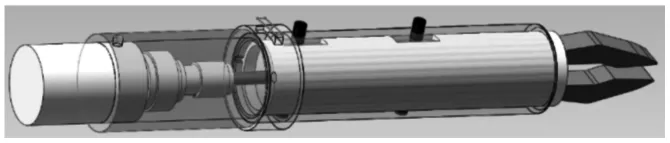
图5 多功能空间机器人手爪Fig.5 Smart Multifunctional Space Robot Gripper
4.7 方案优化与验证
针对得出的初步设计方案,采用AD—TRIZ对其进行优化设计。为解决手爪体积与重量都较大的问题,参考发明原理7(套装)第二条:“使一个物体穿过另一个物体的空腔”,把机器手掌设计为圆形套筒,驱动电机和滚珠丝杆均置于内腔。参考发明原理15第一条:“使物体或其环境自动调整,以使其在每个动作阶段的性能达到最佳”,指尖采用弹性材料可在增大夹持力的同时满足其适应性高的特点。最后根据奥斯本检核表法验证方案符合最初用户需求和空间环境要求。解决了传统手爪夹持力小、重量大、使用复杂不方便的问题,具有结构紧凑、体重比小、工作效率高、性能稳定的特点,通过一个主体手爪连接不同功能手指,完成在失重、强辐射环境下抓取物体、进行试验、装配维修等指定动作。
5 结语
参照认知的过程,对于空间机构的创新设计,重点针对空间机构的概念设计阶段,建立了一套完整有效的面向知识的空间机构创新设计过程模型,辅助设计者应用创新设计方法及多领域知识完成空间机构创新设计。
用该模型指导空间机器人手爪的创新设计,最终设计了一种新型灵巧多功能空间机器人手爪。灵巧多功能空间机器人手爪的创新设计验证了面向知识的空间机构创新设计过程模型的正确性和有效性。
[1]Jacob Goldenberg and David Mazursky.Creative in Product Innovation[M].UK:Cambridge University Press,2002,Cambridge,UK.
[2]李文强,李彦,熊艳.一种以面对面的设计知识组织与应用模型[J].计算机集成制造系统,2009,15(6):1062-1069.(Li Wen-qiang,Li Yan,Xiong Yan.Organization and application model of design knowledge based on conception to conception[J].Computer Integrated Manufacturing Systems,2009,15(6):1062-1069.)
[3]张文辉,叶晓平,季晓明.国内外空间机器人技术发展综述[J].飞行力学,2013,31(3):198-202.(Zhang Wen-hui,Ye Xiao-ping,Ji Xiao-ming.Development summarizing of space robot technology national and outside[J].Flight Dynamics,2013,31(3):198-202.)
[4]王磊,李天瑞.一种基于矩阵的知识粒度计算方法[J].模式识别与人工智能,2013,26(5):447-453.(Wang Lei,Li Tian-rui.A matrix-based approach for calculation of knowledge granulation[J].Pattern Recognition&Artificial Intelligence,2013,26(5):447-453.)
[5]刘康,李彦,赵武.基于本体的FPBS设计模型研究[J].工程设计学报,2012,19(5):329-334.(Liu Kang,Li Yan,Zhao Wu.Research of ontology based FPBS design model[J].Applied Mechanics&Materials,2012,19(5):329-334.)
[6]袁峰.面向需求的机械产品原理方案创新设计关键技术研究[D].天津:天津大学,2006.(Yuan Feng.Research on the key technology of the innovation design of the mechanical product principle scheme for the demand[D].Tianjin:Tianjin University,2006.)
[7]邓家褆,韩晓建,曾硝.产品概念设计[M].北京:机械工业出版社,2002(5).(Deng Jia-ti,Han Xiao-jian,Zeng Xiao.Product Conceptual Design[M].BeiJing:China Machine Press,2002(5).)
[8]孔峰,刘鸿雁.AHP综合排序算法分析及其改进[J].哈尔滨工业大学学报,2009,41(4):260-263.(Kong Feng,Liu Hong-yan.Analysis and improvement on final ranking of AHP algorithm[J].Journal of Harbin Institute of Technology,2009,41(4):260-263.)
[9]田宇.基于 FMECA 方法的应用分析与研究[J].传动技术,2011,25(3):44-47.(Tian Yu.Analysis and research based on the method of FMECA[J].Drive System Technique,2011,25(3):44-47.)
[10]付敏,范德林,李锐.基于TRIZ和AD的集成创新设计模型及其应用[J].机械设计,2014(3):10-14.(Fu Min,Fan De-lin,Li Rui.Integrated innovation method based on TRIZ and AD and its application[J].Journal of Machine Design,2014(3):10-14.)
猜你喜欢
哈哈画报(2021年10期)2021-02-28
山东工艺美术学院学报(2020年2期)2020-06-13
装备制造技术(2019年6期)2019-08-15
山东工艺美术学院学报(2019年2期)2019-05-16
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
制造业自动化(2017年2期)2017-03-20
中国卫生(2015年1期)2015-11-16
中国卫生(2015年8期)2015-11-12
图书与情报(2013年1期)2013-11-16
