
面向果园的手柄操作拖拉机转向控制系统研究
2018-03-05 12:33高鹏飞
机械设计与制造 2018年2期
高鹏飞,李 航
(河南科技大学 机电工程学院,河南 洛阳 471003)
1 引言
农业是我国的基础产业,对国家的发展有至关重要的作用,提高农业生产效率保障粮食安全是现代农业的首要任务。提高农业生产效率的有效方法就是采用机械化耕作,对于现代农业来说不仅要求机械化普及,而且要推广智能化农机。智能化农机的应用不仅能够提高作业效率,改变传统的作业方式,而且对我国农业的发展也起着推动作用。目前智能化农机的发展趋势是以现有的农机为基础,将电子控制技术、人工智能技术、新制造技术等融入到现有的设备中,增加设备的功能,提高作业精度及效率。目前我国农业机械的主要还是手扶式拖拉机以及小四轮轮式拖拉机,现有的农业设备主要是运输,以及作为动力源进行农业作业[1]。因此设计一套综合智能化操作系统将传统的拖拉机升级为智能化农机对于我国果园机械发展具有重要意义。果园用智能化拖拉机是以普通拖拉机为研究对象,在不影响原车操作系统的基础上设计了三种操作模式,分别为远程遥控操作模式、GPS导航无人驾驶操作模式和手柄操作模式。三套操作系统最终要通过一套运动执行系统完成对拖拉机的控制,运动执行系统结构,如图1所示。研究的重点是在手柄操作模式下转向执行系统的设计,该机构是实现多模式操作的基础。该转向系统不影响原车手动操作,在手柄模式出现故障时,能够快速的切换到人工模式下继续作业,提升了拖拉机的可靠性、作业效率。果园环境低矮,作业环境恶劣,驾驶员可以根据实际工况选择驾驶模式。面向果园耕作的多系统拖拉机转向构造,如图2所示。

图1 运动执行机构结构图Fig.1 Structure Diagram of Motion Mechanism
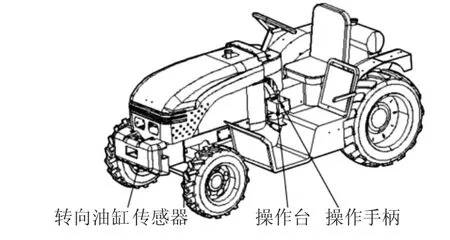
图2 转向系统布局图Fig.2 Structure Layout of Steering System
2 设计方案
课题的拖拉机转向方式是通过前轮相对车身偏转一个角度实现转向。偏转车轮式转向系统由方向盘、转向阀、传动部件等组成[2]。转向系统设计是通过对原车转向系统加装比例换向阀、液压油管、TCU控制系统、操作台、控制手柄等元件,使其改造成能通过操作手柄控制转向的智能拖拉机。转向系统的控制结构,如图3所示。拖拉机作业环境比较恶劣,经常面临扬尘、潮湿等环境,装有智能操作系统的拖拉机电子控制系统、电液操控系统在恶劣环境下没有原车机械式操作可靠性高。在恶劣环境下作业时,智能操作拖拉机并不能满足所有作业需求,因此仍需保留原车人工操控系统,提高拖拉机的可靠性及实用性。对拖拉机转向系统进行设计时需要对执行机构进行改造,一般对转向改造采用电气控制、电液控制或者电机控制[3-4]。对该型号拖拉机的转向系统进行分析,并参考前人对拖拉机的设计方案,设计出适合该型号拖拉机的改造方案,设计原理,如图4所示。

图3 转向控制系统的结构图Fig.3 Structure Diagram of Steering Control System

图4 手柄操作拖拉机转向系统原理图Fig.4 Schematic Diagram of Handle Tractor Steering System
手柄操作模式下转向的工作原理为:拖拉机的手柄驾驶模式与人工驾驶模式通过电磁阀S1控制。电磁阀S1得电时处于手柄驾驶模式,从液压泵出来的液压油经过电磁阀S1流向电磁阀S3、S4控制转向油缸。电磁阀S3与S4为联动设计,操作手柄无操作时,电磁阀S3、S4处于断电状态,液压油直接回油箱,减少能量损失,同时降低液压系统发热量。当转向手柄运动时,电磁阀S3、S4得电,液压油经过电磁阀S1、S3、S4流入转向油缸推动活塞运动,活塞杆带动前轮转动完成转向动作。当电磁阀S1断电时,手柄操作系统失效,此时为人工方向盘操作,液压油经过电磁阀S1流入到原车的转向油路中,通过方向盘转动带动液压转向器转动,从而使液压油流向转向油缸推动活塞杆运动实现拖拉机的转向。该系统同时还设计有手动换向阀S2,当电磁换向阀因油液污染、杂质堵塞出现故障导致切换开关S1失灵时,可以通过S2手动切换操作模式,提高了该装置的可靠性。转向油缸进油油路与回油油路之间设计有双向溢流阀,当换向阀处于中位状态时,液压缸两端油路均处于断路状态。拖拉机行驶过程中遇到突变载荷时,液压油能通过双向溢流阀从液压缸压力高的一侧流入压力低的一侧,均衡转向油缸两腔压力,有效保护转向系统,提高可靠性。
3 模型建立
3.1 阀的特性分析
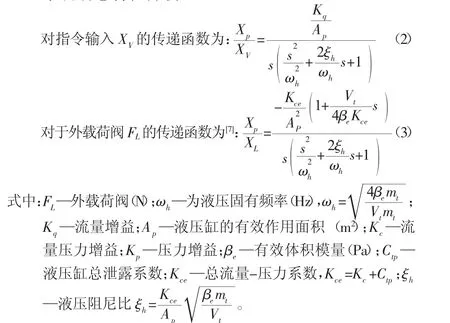
设计的转向系统的原理是用电磁阀控制液压缸位置,通过控制输入电流的大小,把电信号的大小转化成电磁比例阀阀芯的位移方向及位移量,实现液压油流向和流量的控制,达到液压缸活塞杆运动方向的切换和位置控制的目的[5]。转向控制系统的核心是电磁比例阀,它是以电流变化量ΔI作为输入量,以空载时的流量qL作为输出量。在实际应用中,一般是将液压系统的传递函数简化成二阶震荡环节。电磁阀的传递函数可表示为:

式中:KSV—电磁比例阀的流量增益;ωSV—电磁比例阀的固有频率(Hz);ξSV—电磁比例阀的阻尼比;TSV—电磁比例阀的时间常数[6]。
3.2 系统动态特性分析
根据以上关系式可得到转向系统的传递函数,如图5所示。

图5 控制系统模型方框图Fig 5 Diagram of System Model
4 控制器设计及仿真
4.1 控制器设计
控制器是转向系统的大脑,它的作用是调整参数,实现系统的最佳控制效果。模糊PID控制不仅有PID控制的优点,而且还能根据工况实时调整参数,控制效果更好。普通PID控制器是直接控制KP、KI、KD三个参数,转向控制系统使用的模糊控制器是对 KP、KI、KD三个参数的增量 ΔKP、ΔKI、ΔKD进行控制,增量的变换范围比较小,计算速度比较快,能提高系统的运算速度[8]。该控制器逻辑正定表达式为:

式中:KP—比例系数;KI—积分系数;KD—微分系数;KPO—比例系数初值;KIO—积分系数初值;KDO—微分系数初值;ΔKP—比例系数增量;ΔKI—积分系数增量;ΔKD—微分系数增量。

图6 隶属度函数图Fig.6 Diagram of Membership Function
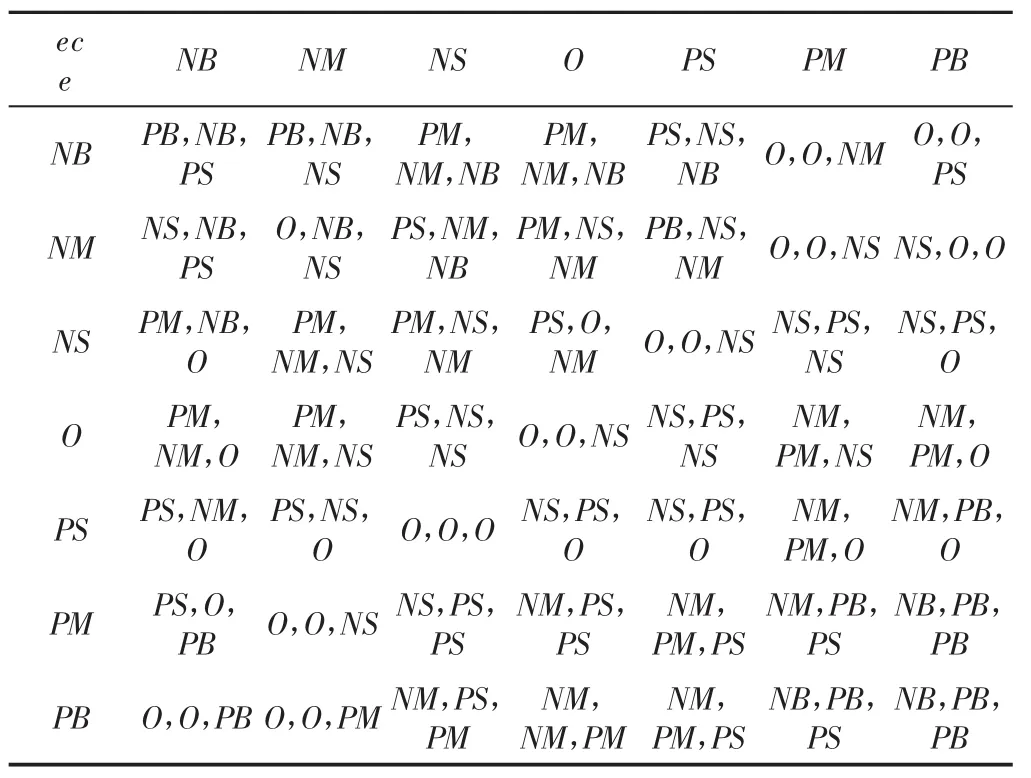
表 1 ΔKp、ΔKI、ΔKD 的模糊规则Tab.1 Fuzzy Control Rules of ΔKp、ΔKI、ΔKD
4.2 仿真分析
根据前面章节得到的数学模型,建立了在SIMULINK工作界面下的结构框图。手柄转向系统需要转向时,驾驶员推动手柄进行转向,此时可看作是一个阶跃信号输入。拖拉机需要调头时,转向轮需要不停转动调节方向,此时可看作是一个正弦信号,因此仿真信号源选择阶跃信号和正弦信号进行分析[10]。在拖拉机驾驶时,转向轮从中位转到一侧极限位置用时大概1.5s,因此仿真时正弦信号采用与日常驾驶接近的频率0.16Hz。阶跃信号是为了评价系统的动态特性与拖拉机转角无关。根据设计的模糊控制器建立的仿真模型,如图7所示。建立的仿真模型中Ge、Gec为误差以及误差变化率的量化因子。GKp、GKI、GKD为 ΔKP、ΔKI、ΔKD的量化因子,模糊规则如前文所示,加入模糊PID控制器后的仿真结果,如图8所示。从图8的结果可以看到,阶跃信号的响应速度很快,上升时间为0.38s,超调量为11.2%,系统能够快速稳定,达到稳定的时间为0.86s。从图9的仿真结果可以看出,输入信号的频率为0.16Hz,输出信号跟踪效果良好,信号延迟时间为0.14s,幅值误差降为3%。从以上的仿真结果看出输出信号的动态响应效果良好,但还存在一定的延迟,延时较小,基本满足使用要求。
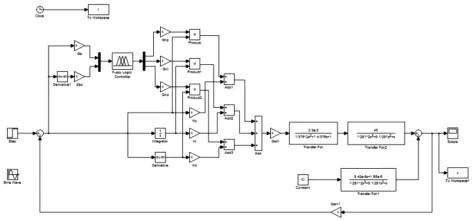
图7 转向系统模糊控制仿真框图Fig.7 Simulation Diagram of Fuzzy Control for Steering System

图8 模糊控制下阶跃信号响应曲线Fig.8 Response Curve of the Step Signal Under Fuzzy Control

图9 模糊控制下正弦信号响应曲线Fig.9 Response Curve of the Sine Signal Under Fuzzy Control
5 试验
基于已经研制成功的面向果园耕作的多操作系统拖拉机进行转向系统和离合器控制系统的试验分析。试验的目的是为了验证系统的跟随效果,在实际作业时转向时机,转角大小是驾驶员根据环境判断。试验装置,如图10、图11所示。

图10 面向果园耕作的轮式拖拉机Fig.10 Wheeled Tractor for Orchard Cultivation
拖拉机作业时大多是时间是直线行驶,驾驶员只需要小角度对拖拉机位姿进行调整,调整角度比较小,一般在±10°之间,因此实验采用小角度方波进行跟踪试验,方波的幅值为±10°。拖拉机转向系统设计的最大转角为±38°,在地头进行调头时会大角度转向,转向时很少出现打死现象,因此本实验用正弦信号模拟大角度转向,正弦信号幅值为±30°。试验结果,如图12、图13所示。从图12的试验结果的跟踪曲线可以看出转向系统在方波信号的情况下响应快,转到指定角度用时0.46s,最大误差为1.68°,控制过程平稳没有大的波动。从图13的试验结果看出转向系统在正弦信号输入的情况下响应快,转角跟踪效果比较好,期望角度与实验结果最大误差为2.63°,控制过程比较平稳没有出现较大波动。根据上图的试验结果与仿真结果相比较可以看出,试验结果与仿真结果有一定的差距,这是由于仿真将模型简化,与实际应用条件有一定误差,总体而言试验结果达到预期结果,满足转向系统的要求,转向轮对信号有较好的跟随性。

图11 转向系统安装的角度传感器及TCUFig.11 Steering Angle Sensor and TCU
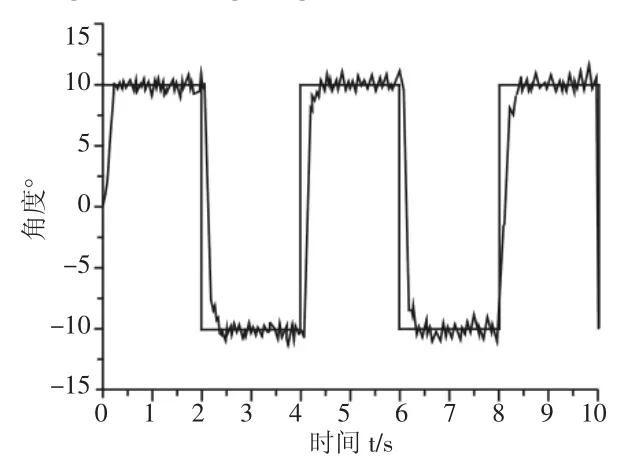
图12 ±10°方波信号转角跟踪效果Fig.12 Steering Angle Tracking Curve of±10°Square Wave

图13 ±30°正弦信号转角跟踪效果Fig.13 Steering Angle Tracking Curve of ±30°Sine Wave
6 结论
以普通拖拉机为基础,根据使用要求设计了一套转向控制系统。拖拉机的智能操控系统可通过该系统实现对拖拉机转向的控制。通过对转向系统的理论及仿真分析验证了控制策略的正确性。试验结果表明该转向系统控制效果良好,可满足智能农机的使用。
[1]孟祥金,沈从举,汤智辉.果园作业机械的现状与发展[J].农业机械,2012(25):114-117.(Meng Xiang-jin,Shen Cong-ju,Tang Zhi-hui.Actuality and development of orcha-rd machinery and equipment[J].Journal of Agricultural Machinery,2012(25):114-117.)
[2]李文哲,许绮川.汽车拖拉机学[M].北京:中国农业出版社,2005:12-15.(Li Wen-zhe,Xu Qi-chuan.Tractor Automobile Theory[M].Beijing:China Agriculture Press,2005:12-15.)
[3]赵建东.基于东方红SG-250拖拉机电控液压转向系统研究[D].南京:南京农业大学,2012:5-30.(Zhao Jian-dong.Research of electronic hydraulic steering system based on the dong fang-hong sg-250tractor[D].Nanjing:Agricultural University of Nanjing,2012:5-30.)
[4]金月,鲁植雄,李文明.拖拉机线控液压转向的电液加载试验台的设计与试验[J].中国农机化学报,2014(3):124-129.(Jin Yue,Lu Zhi-xiong,Li Wen-ming.Design and experiment of electronic hydra-ulic loading test-bed based on tractor’s hydraulic steering by wire[J].Journal of Chinese Agricultural Mechanization,2014,35(3):124-129.)
[5]王春兴.液压控制系统[M].北京:机械工业出版社,1999:21-34.(Wang Chun-xing.Hydraulic Control System[M].Beijing:Mechanical Industry Press,1999:21-34.)
[6]常钰,冯永保.电液比例阀控缸速度控制系统的建模与仿真[J].液压气动与密封,2011(8):23-27.(Chang Yu,Feng Yong-bao.The Modeling and Simulation of Electro hydraulic Proportional Valve-controlled Cylinder Speed Servo System[J].Hydraulics Pneumatics.,2011(8):23-27.)
[7]林君哲.基于电液伺服位置控制的振动出料系统设计与仿真研究[D].东北大学,2007:21-44.(Lin Jun-zhe.Design and simulation research of the vibration discharge system based on the electro-hydraulic position servo system[D].Northeastern University,2007:21-44.)
[8]方志明.自适应模糊控制算法的研究[D].镇江:江苏大学,2003:14-44.(Fang Zhi-ming.Research on adaptive fuzzy control algorithm[D].Zhengjiang:Jiangsu University,2003:14-44.)
[9]石如冬.自适应模糊控制算法研究及其实现[D].哈尔滨:哈尔滨工业大学,2008:11-36.(Shi Ru-dong.Study on adaptive fuzzy control algorithm and its implementation[D].Harbin:Harbin Institute of Technology,2008:11-36.)
[10]霍立志.拖拉机电液助力转向系统的研究与仿真[D].西北农林科技大学,2010.24-37.(Huo Li-zhi.Study and simulation of electro-hydralic power steering system for tractors[D].Northwest Agriculture and Forestry University,2010:24-37.)
猜你喜欢
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
石油商技(2021年1期)2021-03-29
装备制造技术(2020年11期)2021-01-26
化工管理(2020年19期)2020-07-28
小学生必读(低年级版)(2019年3期)2019-07-08
电子制作(2018年11期)2018-08-04
儿童故事画报(2018年4期)2018-05-21
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
