
无舵机转向系统原理分析与控制研究
2018-03-21 05:47阚英哲龙克俊谢小洪
机械设计与制造 2018年3期
罗 勇,阚英哲,龙克俊,谢小洪
(重庆理工大学 重庆汽车学院,重庆 400054)
1 引言
现有的转向设计一般是针对于舵机转向,无舵机转向在目前的研究领域中仍处于一个尚未开发的阶段。然而,无舵机转向有着舵机转向并不具备的许多优势。舵机转向需要完整的舵机设备以及相配套的机械结构,使其机械机构变得复杂,空间结构变大。因此一些结构本来就简单或者希望减小体积的小车并不适合采用舵机转向。例如在工厂里运送货物的平板车,本身结构简单,实现电机控制的最优方法是采用无舵机转向。无舵机转向是依靠安装在前端且配有电动机的左右车轮,利用其转速差来实现的。在这些小车上采用无舵机转向既可以简化小车的机械结构,又可以实现灵敏稳定的转向,在一些特定情况下,无舵机转向要大大优于舵机转向。因此,对于无舵机转向的研究,可以为不需要舵机或机械结构无法添加舵机的设备提供新的思路。
2 无舵机转向原理分析
无舵机转向即为不使用舵机转向,而是采用固定在轴承上、角度不变的左右两个前车轮的转速差来实现转向。为了配合左右车轮转速差实现转向,则两个后轮采用万向轮。为了方便无舵机转向的原理分析,我们假设整个车体为一个平板,两前轮固定在轴承上与电机相连,由左右两个电机分别驱动。下面我们对其进行转向的原理分析。
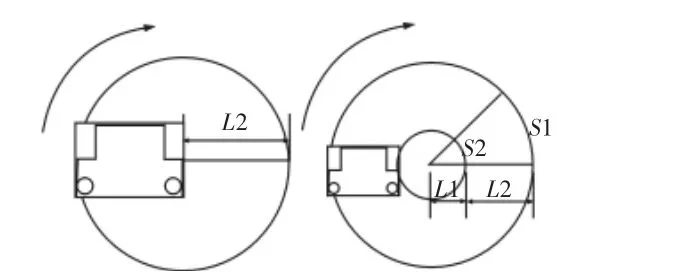
图1 运行轨迹图Fig.1 Running Track Diagram
首先,我们假设右车轮的车速为0,左车轮以一固定转速转动,则车的运动轨迹是一个圆,圆的半径即车的宽度L2,如图1(a)所示。假设左右车轮以不同的固定速度运行,且左边的速度VL大于右边的速度VR,则平板车的运行轨迹是一个同心圆,如图1(b)所示。
设左轮在0.5s内转过的路程为S1,右轮在0.5s内转过的路程为S2。截取极短时间内小车的行驶转角,取同心圆中的一个扇形,根据扇形公式得:

式中:S1、S2—左、右轮在0.5s内转过的路程;L1—车右轮距转向圆心的距离;L2—车宽;α— 0.5s内的转角;vL、vR—左、右车轮转速。
因为两个扇形的圆心角相等,故:

转向半径L=L1+L2。
已知转向半径L,左轮行驶距离S1。根据扇形弧长公式计算转向角

假设在右转向过程中,转速控制对象只有左车轮,右车轮的车速保持不变,故等式右边的变量只有vL,而vR和vR决定的其他变量则视为常数。

式子两边同时对时间求导,将目标转角α作为控制系统输入值,右轮的转速vL作为输出值,对该式进行拉式变换,将转向角转化为弧度制,左轮转速vL与转向角α之间的传递函数为:

通过电机方程式线性化后的增量方程,建立起传递函数形式的数学模型,根据电磁、极点过程分离处理的原则,在研究电压由原来的ua0变到ua0+Δua的电磁过度过程时,设电流相应地由ia0变化至ia0+Δia,电磁转矩也由T0变到T0+ΔT,但转速认为不变。这样电压跃变前后的电路方程为[1]:
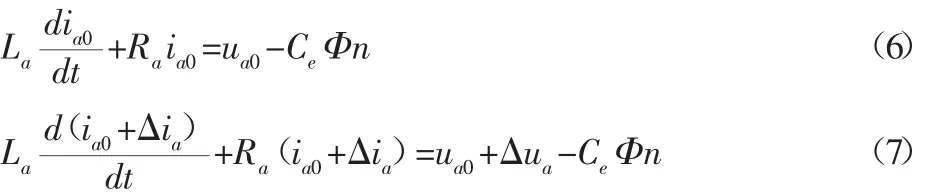
式中:ua—电枢电压(V);ia—电枢电流(A);La、Ra—电枢电感(H)、电枢电阻(Ω);Φ—每级磁通(Wb);Ce—直流电机电势常数。
将上面的两式相减,可求得电压增量Δua和电流增量Δia之间的传递函数,在这个电流增量Δia的作用下,将产生转矩增量ΔT=CtΦΔia。如负载转矩不变,则ΔT全用于自加速,于是求得电压增量Δua与转速增量Δn之间的传递函数为:

式中:Ce、Ct—直流电机电势常数;Ta—电枢回路时间常数;Tm—
机电时间常数(s);J—转动惯量(N·m·s·min/r)。
结合前面的分析及考虑直流电机的一般参数,得到电枢电压u与转向角α之间的传递函数为:

3 无舵机转向控制系统
传统PID控制系统运行过程中参数整定困难,控制进程中各种信号量以及评价指标不易定量表示,工况的变化也常常使控制系统偏离工作点,致使整定好的系统品质恶化[2]。模糊PID控制算法,既具有模糊控制灵活、响应快、适应性强等优点,又具有PID控制精度高的特点,因此可以适用于目标转角不断变化的无舵机转向系统中。通过对偏差的智能化处理,引入智能分段控制概念,根据实际转角与目标转角的差值大小,改变PID中的控制参数,以自动适应调整转速的控制响应速度。
在无舵机转向控制系统中,根据目标转角与实际转角的差值e和差值变化率de/dt来自整定PID各项参数。
3.1 模糊PID控制器设计

式中:u(k)—第k个采样时刻控制器输出量;e(k)—第k个采样时刻控制器输入量(偏差信号);KP,KI,KD—比例、积分、微分系数。
根据不同的e和ec总结出以下一套KP,KI,KD的整定原则:(1)当e较大时,为使系统可以较快地改变转速信号,应取较大的KP和较小的KD,同时为避免出现较大的超调,通常取较小的KI值。(2)当e中等时,为使系统具有较小的超调量,KP要取小些,KI和KD的取值大小要适中,KD对系统响应影响较大,应取得小一些。(3)当e较小时,为使系统有较好的稳态性能,同时避免在平衡点出现震荡,KP和KI均应取的大一些,当ec较大时KD取值小一些;当ec较小时KD可取得大一些。
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的整定。其控制流程图,如图4所示。
将偏差e和偏差变化率ec作为模糊控制器的输入,PID控制器KP,KI,KD作为变化量输出。语言变量输入量e、ec和输出量KP,KI,KD均选取 7 个语言值:PB,PM,PS,Z,NS,NM,NB。
选定输入量 e、ec 论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},输出量论域定为[-3,3]。选择在论域范围内均匀分布的三角形函数作为系统的隶属度函数,其灵敏度较高。
模糊控制规则是对专家的理论知识和大量实验数据分析的总结,结合2.1中PID自整定原则,归纳出控制规则,如表1所示。
离散PID控制规律为:

表1 PID参数控制规则Tab.1 PID Parameter Control Rules
3.2 基于模糊PID控制的系统仿真
在本系统中,设定目标转角由0rad变化为5rad,为了更好地显示模糊PID控制的控制效果,将其仿真模型同PID控制放在一起,如图2所示。

图2 模糊PID控制仿真Fig.2 Simulation of Fuzzy PID Control
设置仿真时间为30s,系统的阶跃响应输出曲线,如图3所示。

图3 模糊PID控制仿真曲线Fig.3 Simulation Curve of Fuzzy PID Control
由此可见,模糊PID控制虽然结构复杂,但控制效果有明显的优势,上升时间短,超调量较小,系统调节时间短,响应速度快,稳定性好。本系统可以在短时间内完成对无舵机转向的控制,并且控制过程稳定。
下面测试系统的跟踪特性,系统的正弦信号响应输出曲线,如图4所示。
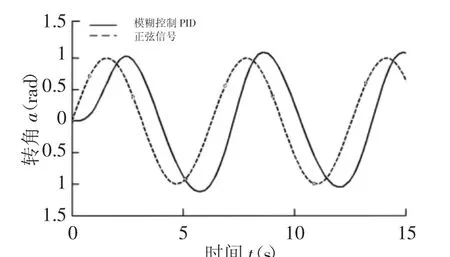
图4 模糊PID控制跟踪特性曲线Fig.4 Tracking Characteristic Curve of Fuzzy PID Control
由图4可见,随着目标转角信号的不断变化,虽然有些延迟,但是能在短时间内将当前转角调整至目标转角。结合无舵机转向调节的具体情况分析,本系统是具有较好跟踪特性的。
4 实验验证
为了进一步验证双模糊PID控制系统对无舵机转向的控制效果,利用自制的平板代步车作为实验对象,代步车结构图,如图5所示。将控制系统编写为程序,下载至代步车的控制器中。代步车有两个压力传感器置于使用者脚下,通过使用者脚下给予的压力,控制左右车轮转速,从而实现转向控制。在代步车中,利用模糊控制根据使用者脚下的电压差来确定使用者的目标转角,作为无舵机转向控制中的目标转角。
在空旷的平地上放置4个圆锥形障碍,由驾驶员驾驶平板代步车按“8字”形绕桩,在第四个桩时绕圆圈返回再次完成“8字”形绕桩。在实验过程中,通过蓝牙串口模块将平板代步车的左右车轮转速回传至电脑。按照前文所述无舵机转向原理分析中的计算方法,将转角计算公式输入Matlab的M文件中,由matlab绘制出实时转角曲线。实物平板代步车及实验方法,如图5所示。

图5 代步车结构图与实验布置Fig.5 Scooter Structure Diagram and Experimental Arrangement
在实验中,驾驶员成功完成了平稳快速的绕桩实验过程,并得到实时转角图像,如图6所示。
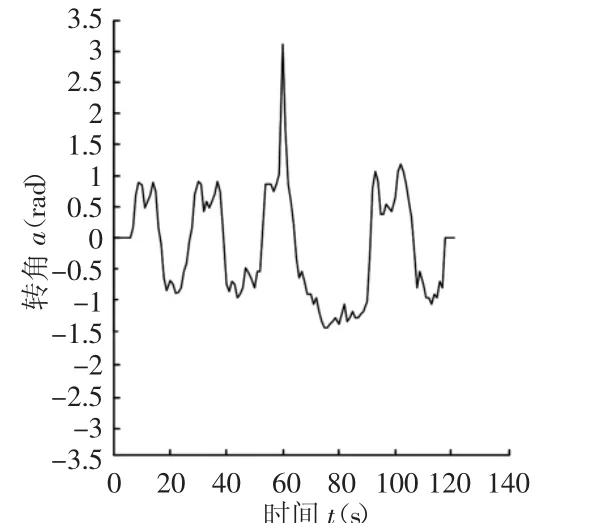
图6 实时转角图像Fig.6 Real Time Rotation Angle Image
由图像可知,在每次绕桩过程当中,转向角会有小范围的波动,是由驾驶员试探性调整转角造成的,证明转角的变化会随着驾驶员的意图而及时调整。在(60~70)s之间,在第四个桩的大转角绕行过程中,转角会根据使用者意图变化至很大。可见本系统不仅能在小转角变化范围内实现稳定控制,而且在大转角变化范围内仍可以灵敏且平稳地控制转角变化。
5 结语
(1)研究分析了无舵机转向原理,并推导了无舵机转向角的计算公式。
(2)基于模糊PID控制,设计了无舵机转向角控制系统,并对控制系统进行了仿真分析,得到的仿真结果是本系统能在短时间内完成对无舵机转向的控制,控制过程稳定,并且具有较好的跟踪特性。
(3)以自制平板代步车为实验对象,验证了所设计的控制系统在实际运用中的控制效果,得到的实验结果验证本系统达到了预期的设计要求。
[1]贺益康,许大中.电机控制[D].杭州:浙江大学出版社,2010(5).(He Yi-kang,Xu Da-zhong.Motor control[D].Hangzhou:Zhejiang University Press,2010(5).)
[2]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011(1):166-172.(Wang Shu-yan,Shi Yu,Feng Zhong-xu.Research on the control method of fuzzy PID controller[J].Mechanical Science and Technology,2011(1):166-172.)
[3]韦庆志,李正明,孙俊.基于模糊自适应PID控制的锅炉过热蒸汽温度控制系统[J].机械设计与制造,2010(7):173-175.(Wei Qing-zhi,Li Zheng-ming,Sun Jun.Boiler superheated steam temperature control system based on fuzzy adaptive PID control[J].MachineryDesign and Manufacture,2010(7):173-175.)
[4]舒志兵,周玮,李运华.交流伺服运动控制系统[D].北京:清华大学出版社,2006(3).(Shu Zhi-bing,Zhou Wei,Li Yun-hua.AC servo motion control system[D].Beijing:Tsinghua University Press,2006(3).)
[5]陈鹏,段凤阳,张庆杰.基于模糊PID的无人机姿态控制器的设计[J].弹箭与制导学报,2015(1):9-11.(Chen Peng,Duan Feng-yang,Zhang Qing-jie.Design of UAV posture controller based on fuzzy PID[J].Journal of Missile and Guidance,2015(1):9-11.)
[6]刘海珊,陈宇晨.无刷直流电机PID控制系统仿真及实验研究[J].系统仿真学报,2009(16):5157-5160.(Liu Hai-shan,Chen Yu-chen.Simulation and experimental research on PID control system of brushless DC motor[J].Journal of System Simulation,2009(16):5157-5160.)
[7]李毅,温正忠.风力发电偏航系统的PID-Fuzzy分段复合控制研究[J].机械设计与制造,2007(4):54-55.(Li Yi,Wen Zheng-zhong.Research on PID-Fuzzy segment composite control of wind power generation yaw system [J].MachineryDesign and Manufacture,2007(4):54-55.)
[8]仇成群,刘成林,沈法华.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012(6):197-202.(Chou Li-qun,Liu Cheng-lin,Shen Fa-hua.Design of vehicle cruise controlsystembasedonMatlaband fuzzy PID[J].Journal of Agricultural Engineering,2012(6):197-202.)
[9]郭景华,胡平,李琳辉.基于遗传优化的无人车横向模糊控制[J].机械工程学报,2012(6):76-82.(Guo Jing-hua,Hu Ping,Li Lin-hui.Lateral fuzzy control of unmanned vehicle based on genetic optimization[J].Journal of Mechanical Engineering,2012(6):76-82.)
[10]姜杉,冯文浩,杨志永.基于模糊PID调节的核磁兼容机器人气动控制技术[J].机器人,2012,34(5):521-538.(Jiang Shan,Feng Wen-hao,Yang Zhi-yong.Dynamic control technology of nuclear magnetic compatibility based on fuzzy PID control[J].The Robot,2012,34(5):521-538.)
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
人民周刊(2020年17期)2020-10-29
百姓生活(2020年8期)2020-08-24
弹箭与制导学报(2020年1期)2020-07-09
自动化学报(2019年6期)2019-07-23
弹箭与制导学报(2019年6期)2019-06-24
汽车与安全(2018年4期)2018-05-10
电子制作(2018年1期)2018-04-04
家庭百事通·健康一点通(2017年6期)2017-06-20
