
强杂波背景下火控雷达动目标处理性能分析
2018-05-10 19:17刘鑫毕立财
现代导航 2018年2期
刘鑫,毕立财
(中国人民解放军92941部队,辽宁葫芦岛 125001)
0 引言
舰炮火控雷达所面临的无源杂波环境一般比较复杂,有海杂波、地物杂波和各种敌方释放的杂波干扰等,火控雷达要想在复杂的杂波环境中完成对目标的捕获跟踪,雷达必须具有较强的杂波抑制能力。出于对海杂波背景下反舰导弹的跟踪需求,末端反导舰炮武器系统的火控雷达通常采用动目标处理(MTD)技术,实现在强海杂波环境下运动目标的各种参数的提取。雷达动目标处理的工作质量一般用改善因子I来衡量,改善因子的提高受限于雷达相关部分的性能,如杂波内部的起伏运动,雷达各系统部件的不稳定性,A/D变换器的量化噪声,正交双通道的幅相不一致等[1]。因此,雷达要从复杂的杂波背景中提取目标信息也具有一定限制。本文针对某型火控雷达在检飞中 AGC控制值出现跳变而后丢失目标问题,在检查AGC控制环路后,对动目标改善因子指标进行复测,结果表明AGC控制环路正常,动目标改善因子指标满足要求。根据试验时海域存在大型船只的实际情况,将近似船只反射强度的杂波信号输入雷达接收机以验证雷达对动目标的实际检测情况,结果表明雷达丢失目标是由于外部极强杂波干扰进入雷达接收机,使得接收机过载而不能正常工作,导致雷达丢失目标。
1 问题的提出
某型雷达在对空中目标跟踪过程中出现丢失目标的现象。图1、图2分别为雷达稳定跟踪目标航路和雷达丢失目标航路时的 AGC对比图。通过两图对比可以看出,雷达在丢失目标时,AGC出现瞬时跳跃,其幅值较起控值大40dB以上,正常跟踪航路相对于目标丢失航路在距离远区 AGC值总体偏小。
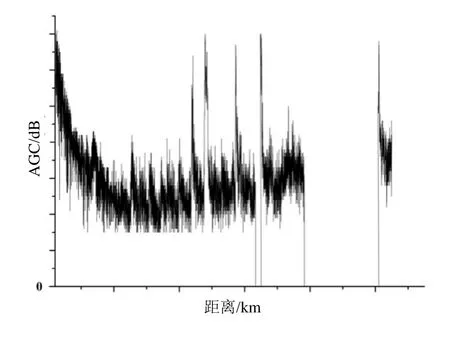
图1 雷达丢失目标AGC幅值曲线图

图2 雷达正常跟踪AGC幅值曲线图
2 AGC控制电路检查
为查找雷达丢失目标问题产生的原因,分别对接收通道幅度一致性、伺服系统跟踪精度、跟踪电子环路进行检查,各项指标均满足要求。根据试验过程中AGC控制值出现跳变的现象,首先对AGC控制环路进行检查。
AGC控制的主要功能在于:使接收机的增益随回波信号的强弱自动进行调整,在接收微弱回波信号时,使接收机具有足够高的增益,以保证远距离目标的检测;在接收强回波信号时,使接收机的增益随之降低,以保证接收机处于非饱和的线性状态[2]。同时实现测角归一化,使接收机输出的角误差信号强度只与目标偏离天线轴线的夹角有关,而与目标距离的远近和目标反射面积的大小等因素无关[3]。AGC闭环控制系统框图如图3所示。
根据 AGC闭环控制流程,用模拟信号源产生连续波信号,经衰减器后注入到中频接收机,调整信号衰减量(信号强度变化约为-60~10dBm),观察AGC表头指示变化及相位检波器输出,结果表明随信号强度变化 AGC能够实现自动调整,输出信号强度在规定范围内。

图3 AGC闭环控制系统框图
3 改善因子测量
为了达到较好的抑制杂波效果,雷达通常将时域信号变换为频域信号,采用动目标检测技术(MTD)来提取运动目标,而评价MTD性能最常用的性能指标就是改善因子。试验过程中雷达跟踪的目标具有区别于海杂波的径向速度,正常情况下雷达能够稳定跟踪目标,根据雷达丢失目标的实际情况,结合改善因子的测试对雷达动目标检测性能进行了检查。
3.1 雷达MTD工作原理
MTD通过多个滤波器组对雷达回波进行脉冲多普勒处理。然后再对滤波器组的输出进行检测来发现目标。MTD滤波器组一般采用FFT技术实现。
设一个脉组周期雷达共接收M个视频回波信号,对同一距离单元上的N点慢时间数据进行FFT运算,N点FFT运算可表示为[4]:

X(0),X(1),X(2),…,X(N- 1)相当于N个FIR滤波器的输出,第n个滤波器的幅频响应为

式中:fr为脉冲重复频率。
N个滤波器具有相同的幅度特性,每个滤波器带宽为frN,具有不同多普勒频率的信号将从滤波器组中不同的滤波器输出,杂波响应在0号滤波器附近,运动目标响应在远离0号的N号滤波器。
3.2 改善因子测试步骤
采用真实背景杂波和模拟动目标相结合的测量方法测量动目标改善因子,系统组成如图4所示。

图4 动目标改善因子测量框图
测试步骤如下:
(1)控制雷达天线对准地物目标,地物回波强度要满足一定要求;
(2)用模拟信号源产生一叠加多普勒频率的连续波信号,与脉冲信号发生器产生的窄脉冲调制后,形成模拟回波信号,经衰减器后与杂波回波信号一起输入到中频接收机;
(3)利用脉冲信号发生器调整模拟回波信号时延,使其位于杂波环境中;
(4)调整中频信号源的输出功率,并在频谱仪上观察,使之比杂波信号低30dB左右并记录,该比值即是输入信杂比Si C(dB)。
(5)雷达稳定跟踪模拟回波信号后,记录输出信噪比SCo(dB)。
(6)在允许的速度范围内调节模拟回波信号的多普勒频率,可测试模拟目标速度从零到极限特征值区域内各点的MTD改善因子。
根据输入信杂比和输出信噪比,可以计算出雷达在某一速度上的改善因子I为:

根据上述方法对雷达改善因子性能进行了实际检测,结果满足相应指标要求。为了进一步验证雷达杂波抑制能力,测试时,目标信号与杂波信号均采用模拟方式输入到雷达接收机,杂波信号强度根据检飞丢失目标时记录的 AGC值进行设置,目标信号强度根据雷达方程折算获得,设置模拟目标信号相对被测雷达的径向速度与检飞时目标速度相同。当杂波信号强度与检飞丢失目标时的量值相同时,雷达不能稳定跟踪模拟运动目标,当杂波信号强度衰减到正常跟踪航路量值时,雷达能够稳定跟踪目标。现象与实际检飞过程相符。
4 丢失目标原因分析
通过对 AGC控制环路检查及动目标改善因子测试,验证了雷达的工作稳定性。根据雷达对空中目标跟踪过程中 AGC出现瞬时跳变的现象,初步确定因外部极强杂波信号进入雷达接收机,最终导致目标丢失。结合试验过程中视频图像观察,发现试验航路上存在着大型船只,虽然船只与空中目标处于不同距离范围,但在目标丢失距离段内船只与空中目标同处雷达波束内。为了解决距离模糊问题,雷达采用高重频工作方式,当近区的极强杂波折叠到动目标小信号上时,由于对强杂波信号的抑制,AGC量值会突然变大,直接导致运动目标回波信号幅度衰减较大,使得动目标小信号小于A/D变换最小量化单位,即小信号被屏蔽,无法完成速度检测。此时小目标回波淹没在杂波信号之中,当连续数周期信噪比小于检测值时,雷达判别为目标丢失。
5 结束语
本文针对某型雷达对空检飞过程中丢失目标的问题,从雷达动目标提取过程进行分析,利用MTD改善因子测量方法模拟检飞过程,验证了雷达丢失目标的根本原因是由于外部极强杂波干扰进入雷达接收机,使得接收机过载而不能正常工作,最终导致目标丢失。从分析过程可以看出,雷达试验组织过程中应充分考虑装备的性能指标,综合分析可能存在突发性干扰因素,只有这样才能客观公正的评价装备的战技术性能。
参考文献:
[1]奚玮.雷达动目标处理系统指标分析[J].信息化研究,2002, 28(08):60-63.
[2]梁兵, 洪伟.模糊逻辑控制技术在雷达自动数字增益控制中的应用[J].舰船电子对抗, 2011,34(03): 26-31.
[3]李邦芹.三路单脉冲雷达接收机 DAGC技术的工程实现[J].电子科技, 2012,25(06):133-135,139.
[4]周亚飞, 赵修斌, 邹鲲.FFT-MTD滤波器组优化设计与仿真[J].仿真技术, 2011,39(02):160-163,175.
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
机械设计与制造(2022年5期)2022-05-19
导航定位学报(2022年1期)2022-02-17
中成药(2022年1期)2022-01-27
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
测绘通报(2016年9期)2016-12-15
电子制作(2016年1期)2016-11-07
