采用无人机测量事故现场的方法
2018-05-31 00:48陈启村杨洪臣
四川警察学院学报 2018年6期
刘 松,陈启村,杨洪臣
(1.四川警察学院 四川泸州 646000;2.东莞市公安局虎门分局 广东东莞 523900 3.中国刑事警察学院 辽宁沈阳 110854)
一、问题的提出
传统的事故现场测量手段是通过人工拉皮尺测量现场数据后,再人工完成现场图草图及现场比例图。传统的事故现场测量方法存在着测量效率低下、测量误差较大、且测量工作可能影响事故地点车辆的正常通行,容易造成二次的交通事故;当事后需要补充事故现场的相关测量数据,很难再次测量[1-2]。
于是有人提出基于摄影原理利用现场摄影图像进行摄影图像校正的测量方式。该方法主要是在场景中标定4点,通过场景点和成像点的对应关系找到点和点间的映射关系,进而找到场景平面和成像平面间任意点的映射关系[3]。基于这样的原理,有公司推出了如PC—RECT、PhotoModeler、iWitness和123D Catch等鲁棒好的摄影图像测量分析软件[4-7]。该类软件实现了现场重建“平面到平面”的二维校正算法,可用于一般平面现场数据的测量。该方法具有简单、快捷和信息可重建等优点。但是其测量的数据受照片拍摄时摄影位置,角度的影响较大。当摄影倾角越小时校正测量的误差越大。而且该类方法需要在拍照时在场景中加入4个校正面板,也有一定的局限性。
随着无人机技术的发展,各类无人机广泛应用于生产生活的方方面面。将无人机应用到现场拍摄上已成为可能,运用无人机对现场进行拍摄,可以简单高效的拍摄到现场不同位置角度的图像。同时经无人机拍摄的照片在其头部exif包含着拍摄时相机焦距,拍摄点高度及照片的分辨率等信息,利用摄影成像原理可以实现一种基于无人机的的场景测量方法。该方法需要无人机对场景进行垂直摄影但无需在场景中布置校正面板。该方法具有操作简单,效率高,精度准,现场重现能力强等优势。该类现场测量方法在能配备无人机等相关设备的公安实战部门具有较强的应用价值。提高了公安工作效率的同时,增强了工作的有效性。
二、算法
无人机现场测量是通过无人机对现场目标进行垂直拍摄得到相关现场照片;然后通过计算机程序实现对照片exif信息的读取,自动得到与相片相关拍摄高度,焦距及分辨率等相关信息;最后利用摄像原理通过“平面到平面”映射实现现场的快速测量。算法流程如图1:
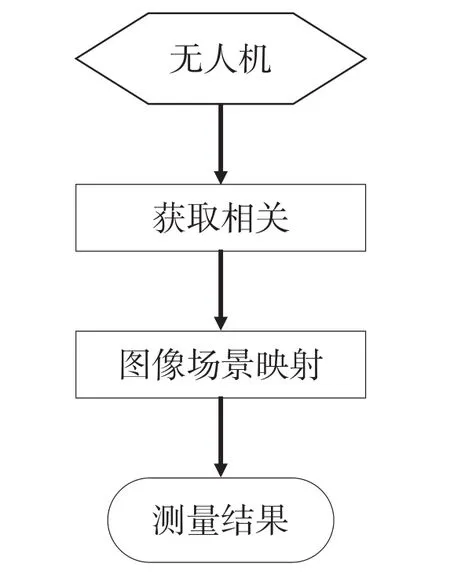
图1 算法流程图
(一)提取exif信息
exif是存储在JPEG格式数码图片头中描述图片拍摄时的焦距、分辨率及GPS全球定位系统数据等信息的一种图像文件格式。如图2(a)是图2(b)的exif信息。
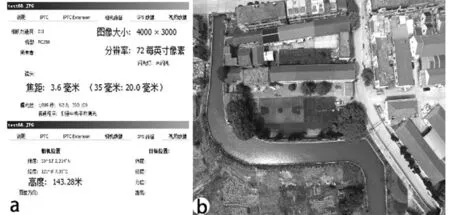
图2 无人机垂直拍摄现场图(a.原图exif信息b.原图)
从图2(a)可以看到图2(b)垂直拍摄35mm等效焦距为20mm、高度为143.276m、图像分辨率为4000*3000dpi。
运用python语言进行程序编写可实现图片exif信息的自动提取。然后进一步利用图片相关exif信息实现“平面到平面”的映射完成现场测量。
(二)“平面到平面”的映射
相机成像利用了凸透镜成像原理(凸透镜成像原理如图3所示),远处距离为u的物体散射光线经凸透镜折射成像在凸透镜另一侧v处,经推导物距u、像距v和透镜焦距f之间有成像公式(1):

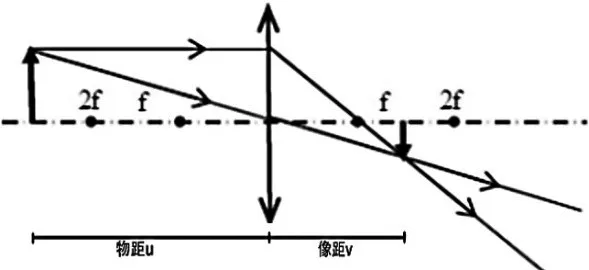
图3 凸透镜成像原理图
无人机在高空垂直俯拍时,相机成像有如图(4)的几何比例关系。其中cmos成像长度为dist_cmos、真实场景长度为dist、拍摄高度为u(垂直高度可视为相机凸透镜与拍摄物的物距u)、摄像机35mm等效物距为v则有公式(2)关系:

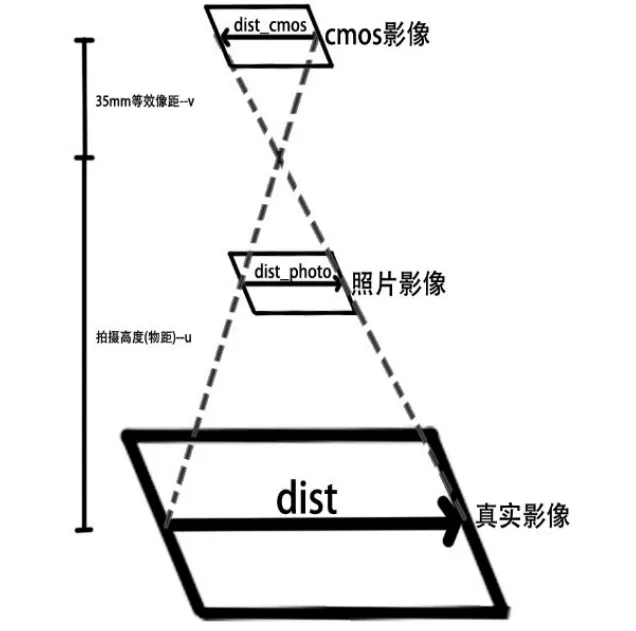
图4 无人机成像场景图
图4中cmos影像和照片影响之间依然存在着几何比例关系。通过将相机cmos等效为35mm效果,cmos成像长度dist_cmos同分辨率为photo_width*photo_height照片成像长度dist_photo有公式(3)关系:

利用透视镜成像原理,并分析无人机高空垂直摄影时真实成像长度dist、cmos成像长度dist_cmos及照片成像长度dist_photo之间存在的几何关系,得到了上述公式(1)~公式(3),整合公式(1)~公式(3)并整理公式可以得到真实成像长度dist的计算公式(4):

其中,u为物体到透镜的距离即无人机垂直摄影时的垂直高度,f为35mm等效cmos焦距,Scmos_35mm为35mm等效cmos感光器件面积,photo_width为照片宽度,photo_height为照片高度。以上参数经1.1节介绍的exif信息均可直接获得。而dist_photo可通过点取照片中待测量线段两个端点(x1,y1)和(x2,y2)并计算两点欧式距离获得。dist_photo的计算有公式(5):

三、算法实现及分析
在第二章的理论推导基础上,运用python语言读取图片exif头部信息并提取到35mm等效焦距、图像高宽、拍照高度等信息,通过交互获取照片中测量线段端点坐标。最终根据公式(4)、公式(5)计算出实际场景中对应线段长度。
为验证本文现场测量算法的可行性及算法精度,实验对无人机垂直拍摄篮球场场景进行测量,拍摄图片如图2(b)所示,读取到图片相关exif信息结果如前文所述,不在累述。
照片中实际篮球场的长为28m,宽为15m,中圈直径3.6m,跑道宽度1m。对场景中上述对象运用本文现场测量算法分别进行三次测量计算每次测量的测量误差及误差率(表1记录了本文测量算法对篮球场长、篮球场宽、篮球场中圈直径及跑道宽进行测量的情况)。

表1 现场测量结果分析表
应用python语言实现本文算法对无人机垂直俯拍标准篮球场及跑道场景照片中的不同尺度对象进行测量,观察表1中的实验测试结果可以得出本文现场测试算法进行测量的结果是比较准确的且本文现场测量算法对无人机空中垂直俯拍的情况下得到的照片只需点击照片中待测量对象首尾端点即可快速得到测量结果,相对传统现场测量方法具有操作简单,测量效率高等优势。
本文对图片2(b)照片中不同尺寸的对象运用本文场景测量算法进行了多次测量并将实验录制成视频,可通过扫描图5中的二维码观看实验效果。

图5 实验视频
四、总结
本文对运用无人机垂直拍摄现场进行测量展开了研究,通过自动提取无人机拍摄照片中的相关参数并运用透镜成像原理及无人机拍摄中“平面到平面”的映射关系理论推导出了一种基于无人机的现场测量算法。通过python语言将算法加以实现并进行了相关实验,证明了本文现场测量算法具有测量准确,操作简便,测量效率高等优点。该现场测量算法在公安现场测量领域具有一定的应用价值。
猜你喜欢
新高考·高二数学(2022年3期)2022-04-29
新高考·高二数学(2022年3期)2022-04-29
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
中学生数理化(高中版.高二数学)(2020年11期)2020-12-14
锦绣·上旬刊(2020年3期)2020-06-08
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高一版(2018年6期)2018-07-09
试题与研究·高考数学(2016年1期)2016-10-13
肇庆学院学报(2016年5期)2016-03-11