
知识引导的挖掘机斗杆结构几何形状约束策略
2018-07-18 05:37张洋梅沈振辉花海燕
安阳工学院学报 2018年4期
张洋梅,沈振辉,花海燕
(1.福建江夏学院,福州350108;2.福建工程学院,福州350108)
挖掘机斗杆结构形状复杂,优化约束体系繁多,有几何形状约束、运动干涉约束、强度约束、稳定性约束等。几何形状约束是结构优化的关键约束,用于约束主体的外轮廓形状。现有结构优化方法中,大多是通过对挖掘机主构件结构各铰孔外径、弯板位置及结构点的坐标等建立大量的数值函数,以实现几何形状约束[1-3]。这种约束模型表达方式的几何条件关系复杂,涉及的函数众多、求解难度大、难以实现畸形结构几何形状的合理化自动调整,降低了约束处理效率。有必要研究一种斗杆结构几何形状分类约束新策略,构建斗杆结构几何形状的分类约束新模型,使之在斗杆结构智能优化过程中,通过查询斗杆结构与斗杆几何形状分类模板的匹配结果,实现畸形斗杆结构的快速识别及斗杆结构几何形状合理化自动调整,提高斗杆结构几何形状约束处理速率。
1 斗杆结构智能优化约束处理机制
在挖掘机斗杆结构智能优化设计中,当斗杆结构优化设计进入约束处理与知识提取阶段时,需对斗杆结构进行多种不同约束条件的处理,如图1所示。

图1 斗杆结构约束处理与知识提取模块
由图1可知:当得到优化群体后,则进入约束处理与知识提取阶段。其中,几何形状约束模块包括:几何形状合理性判别与知识提取子模块、知识引导畸形结构合理化调整子模块,可有效避免畸形斗杆个体进入后续优化阶段而浪费优化时间。在完成第一代结构优化后,若不满足优化停止条件,则进入知识引导全局优化变量值调整。全局优化变量值调整后,便进入下一代结构优化,此时无需对全部斗杆个体进行几何形状约束处理,只要对关键结构参数值有发生改变的个别斗杆个体进行再次几何形状约束处理,其他斗杆个体只需进行应力和固有频率约束处理。因此,与传统斗杆结构几何形状数值约束模型相比,该几何形状分类约束新策略可有效缩短结构优化时间,提高优化效率。
2斗杆结构几何形状分类约束模型的构建方法
采用样本成组聚类法[4]和非均匀网格分割策略,构建多个几何形状特征矩阵,作为几何形状分类模板。在斗杆结构智能优化中,通过查询斗杆几何形状与几何形状分类模板的匹配结果,完成斗杆结构几何形状的分类约束,实现智能优化过程中畸形斗杆结构的快速识别及几何形状合理化自动调整,提高斗杆结构优化速率。本文以中小型挖掘机耳板分离式斗杆结构为例,如图2所示。

图2 挖掘机耳板分离式斗杆结构图[5]
由图2可知,影响该类型斗杆结构几何形状合理性的主要结构参数有DA、SAE、HAF、SKE、HKF、DF、DN和DQ,经分析取SAE LEF、HAF LEF、SKE LEF、HKF LEF和DA LEF作为斗杆结构几何形状分类标志[5]。借鉴斗杆结构设计资料确定斗杆各结构参数的取值区间,通过拉丁超立方抽样法[6]及批量参数化建模,获得斗杆聚类样本集。取几何形状分类标志为聚类变量,将斗杆聚类样本集分为7组,1组斗杆样本子集训练1个几何形状特征矩阵,以7个几何形状特征矩阵作为斗杆几何形状分类模板。采用几何形状两级编码的矩阵单元快速响应方式[7],建立初始几何形状特征矩阵,如图3所示。

图3 几何形状分类标志的值与网格区间矩阵、特征矩阵响应单元的关系[5]
依据图3映射关系,由样本ik的几何形状分类标志向量L[ik]=(Lik[m1],…,Lik[m5]),可得样本ik一级编码串C1[ik]=(C1ik[m1],…,C1ik[m5]),并确定样本ik对应于第k类几何形状特征矩阵的二级编码串C2[ik]=(C2ik[m1],…,C2ik[m5])。几何形状特征矩阵中的每个单元均以0或1记录,0表示该单元未被响应,1表示该单元已被响应。为确保每个几何形状合理的斗杆个体只能成功归类到一个几何形状分类模板,采用非均匀网格区间分割的策略,以完成初始几何形状特征矩阵的有效更新。

表1 第1类几何形状特征矩阵训练样本子集
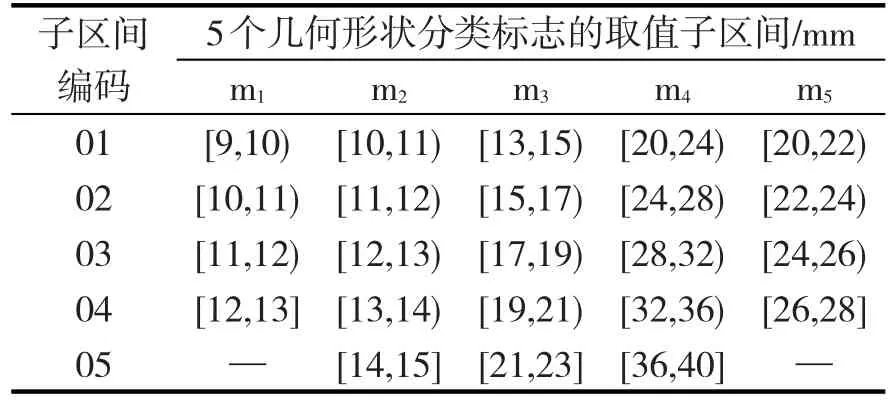
表2 5个几何形状分类标志的网格区间矩阵R5×5

表3第1类几何形状特征矩阵的测试样本集
根据表1和表2的已知条件,由图3所示映射关系可知:训练样本1的几何形状分类标志m1=12,其值属于04子区间[12,13],则几何形状特征矩阵中第1列第4行的响应单元值为1;同理可得,中第2列第1行的响应单元值为1,第3列第4行的响应单元值为1,第4列第1行的响应单元值为1,第5列第2行的响应单元值为1。据此方法,训练第1类几何形状特征矩阵的训练样本2~6,可得到第1类几何形状特征矩阵为
以表3中的测试样本集对第1类几何形状特征矩阵A15×5进行测试。由图3可知:测试样本1一级编码串值为C1[1]=(3,4,5,2,2),对应于矩阵A15×5的二级编码串值为C2[1]=(1,1,0,1,1)。可见C2[1]的5个码位值并非均为1,即测试样本1在矩阵A15×5中归类失败。故,当前无需对矩阵A15×5进行更新。同理可得,测试样本2对应于矩阵A15×5的二级编码串值为C2[2]=(1,1,1,1,1),可见C2[2]的5个码位值均1,即本不属于第1类几何形状特征矩阵的测试样本2却在矩阵A15×5归类成功,故需对矩阵A1进行更新。
5×5
3 非均匀网格分割策略分析
据上述分析可知,非均匀网格分割策略是保证斗杆几何形状特征矩阵有效性的关键,为此,本文提出了3种非均匀网格分割策略,即:逐一网格分割策略、择优网格分割策略和智能网格分割策略,其原理如图4所示。

图4 3种非均匀网格分割策略原理图[5]
1)逐一网格分割策略:根据被重复归类的测试样本jk的一级编码串C1[jk],映射各几何形状分类标志发生重复归类响应的网格区间,对半分割此网格区间,并更新网格区间矩阵RN×5及几何形状特征矩阵AkN×5。
实例:根据上述测试样本2的一级编码串C1[2]=(1,1,2,3,4),确认需分割的网格区间,则表2中的网格区间矩阵R5×5更新为新网格区间矩阵R6×5,如表4所示。
根据表1和表4已知条件,对第1类初始几何形状特征矩阵A15×5进行更新,得到第1类几何形状特征矩阵A16×5为。此时,测试样本2对应于矩阵A16×5的二级编码串C2[2]=(1,0,0,1,1),测试样本2在矩阵A16×5中归类失败,即,矩阵A16×5更新成功。
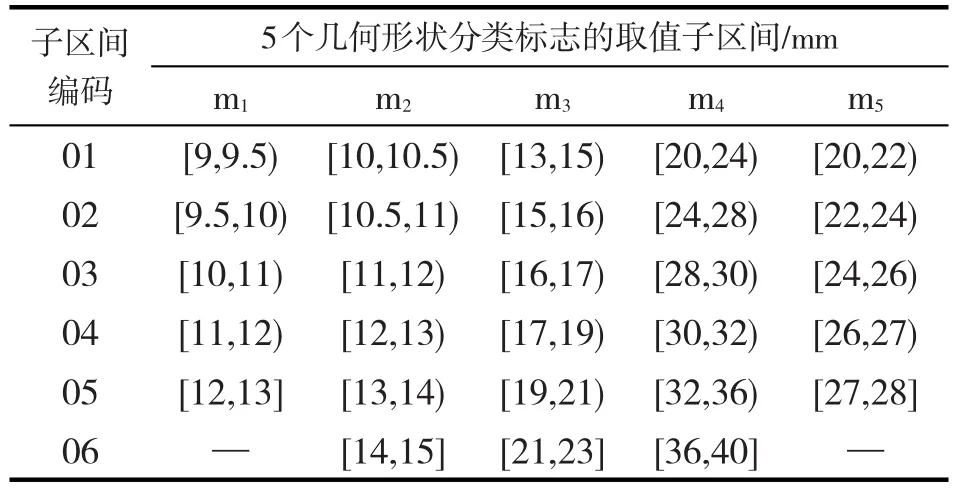
表4 5个几何形状分类标志的新网格区间矩阵R6×5
2)择优网格分割策略:根据被重复归类的测试样本jk一级编码串C1[jk],映射需分割的网格区间,计算样本jk各几何形状分类标志值Ljk[m]与被响应网格区间矩阵单元RH[m]之间的相对距离D[m]=Ljk[m]-RH[m],分割max(D[m])对应的网格区间,更新。
巴黎高等师范学校的神经生理学家文森特·维莱特(Vincent Villette)利用电压传感器研究阈下电信号的周期性波动如何影响小鼠小脑神经对肌肉活动的协调。维莱特表示:有关细胞如何协同运作,我们还知之甚少。
实例:由已知条件可得RH[m]=(9,10,15,28,26),测试样本2的几何形状分类标志向量L[2]=(9.1,10.2,16.1,28.5,27), 计算得D[5]=(0.1,0.2,1,0.5,1),则max(D[m])=1对应的网格区间为m3的02子区间和m5的04子区间,随机选取一个,假设选取的是m3的02子区间[15,17),则分割为[15,16.1)和[16.1,17)。故更新后网格区间矩阵R6×5,如表5所示。

表5 5个几何形状分类标志的新网格区间矩阵R6×5
根据表1和表5已知条件,对第1类初始几何形状特征矩阵A15×5进行更新,得到矩阵A16×5为。测试样本2的对应于矩阵A16×5 的二级编码串C2[2]=(1,1,0,1,1),可见测试样本2在矩阵中归类失败,即第1类几何形状特征矩阵更新成功。
3)智能网格分割策略:根据被重复归类的测试样本jk一级编码串C1[jk],映射需分割的网格区间,计算样本jk各几何形状分类标志值Ljk[m]与被响应网格区间矩阵单元包含的各训练样本ik几何形状分类标志值Lik[m]的绝对距离,取相对距离D[m]=min(d[m]),分割max(D[m])对应的网格区间,更新。
实例:根据已知条件,计算可得表6所示数据。

表6 知识引导网格分割方法的相关数据分析
由表6可知,子区间[9,10)内存在的训练样本ik的m1值有9.4、9.8,与测试样本2的m1=9.1的绝对距离d[m1]为0.3、0.7,则D[m1]=min(d[m1])=0.3。同理可得,D[m2]=0.30,D[m3]=0.3,D[m4]=D[m5]=0.5,故max(D[m])=D[m4]=D[m5]=0.5,其对应子区间为m4的03子区间和m5的04子区间。随机选取一个,假设是m5的04子区间[26,28],因测试样本2的m5=27 ,故分割为[26,27.25)和[27.25,28]。更新矩阵R5×5,如表7所示。

表7 5个几何形状分类标志的新网格区间矩阵R5×5
4 斗杆结构几何形状分类约束处理过程
在挖掘机斗杆结构智能优化过程中,通过几何形状编码串的二次响应,实现斗杆结构几何形状合理性判别及畸形结构合理化调整的约束处理,其主要过程如图5所示。

图5 斗杆结构几何形状分类约束处理过程
如图5所示,根据当前斗杆个体j的几何形状分类标志值Lj[m]确定一级编码串值C1[j];由C1[j]可查询斗杆个体j对应于各几何形状特征矩阵的7组二级编码串值C2[j];判别这7组C2[j]是否存在唯一一组各码位值均为1的二级编码串;若存在,说明斗杆个体j成功归类于该类几何形状模板;若不存在,说明斗杆个体j为畸形斗杆。畸形斗杆个体j需进入知识引导畸形结构合理化调整阶段,实现畸形斗杆个体j的结构合理化调整。斗杆个体j成功归类后,则进入下一个斗杆个体j=j+1的几何形状分类约束处理。循环上述过程,直至完成J个斗杆个体的几何形状分类约束处理。
实例:假设畸形斗杆样本j的几何形状分类标志Lj[m]=(12,11,15,33,25),斗杆结构几何形状分类标志网格区间矩阵R5×5如表1。则畸形斗杆样本j的优化过程约束知识有:一级编码串C1[j]=(4,2,2,4,3),对应于7个几何形状分类模板的二级编码串C2k[j]为C21[j]=(1,0,1,0,1),C22[j]=(1,1,0,0,1),C23[j]=(1,0,0,1,1),C24[j]=(1,1,1,0,0),C25[j]=(1,1,1,0,1),C26[j]=(0,1,1,0,1)和C27[j]=(0,0,1,1,1)。
由畸形斗杆样本j的优化过程约束知识可知:0码位个数最少的二级编码串为C25[j],故第5类几何形状分类模板为畸形斗杆样本j的理想归类模板。令第5类几何形状分类模型的特征矩阵A55×5为,故应把畸形斗杆样本j的第4个几何形状分类标志m4=33应调整为网格区间[28,32)内的值。
5 斗杆结构几何形状分类约束模型构建及验证
利用MFC类库开发软件和VC++6.0编程环境开发耳板分离式斗杆几何形状分类约束模型构建模块,如图6所示。该软化模块能够根据所选择的非均匀网格分割策略训练斗杆结构几何形状分类模板特征矩阵,实现斗杆结构几何形状合理性快速判别及畸形结构的合理化自动调整功能,可视化输出斗杆结构几何形状一级编码串及所归属的几何形状模板类别。

图6 耳板分离式斗杆几何形状分类约束软件模块
以结构类型为耳板分离式的中小型挖掘机斗杆结构为例,验证该几何形状分类约束模型在斗杆结构智能优化中对斗杆结构几何形状的分类约束效果。根据斗杆结构设计经验,确定中小型耳板分离式斗杆各几何形状分类标志取值区间,如表8所示。

表8 耳板分离式斗杆结构几何形状分类标志取值区间
采用拉丁超立方抽样法生成斗杆结构几何形状总样本集,剔除建模失败或结构畸形的斗杆结构样本,最终得到476个几何形状合理的斗杆几何形状特征矩阵训练样本集。采用Ward系统聚类法将此训练样本集分为7类;运用斗杆几何形状约束模型软件模块训练3种不同网格分割方案的斗杆几何形状分类模板。经分析可得,此3种方案均不会将畸形斗杆误判为几何形状合理斗杆,但均有可能把几何形状合理斗杆误判为畸形斗杆,故有必要获取多组不同的验证样本集,用以分析这3种不同方案斗杆几何形状分类模板对几何形状可行斗杆结构的归类成功率。运用上述已建立的3种不同方案的斗杆几何形状分类模板对3组样本个数不同的验证样本集进行几何形状归类处理,其结果如表9所示。

表9 不同方案几何形状分类模板的几何形状归类成功率
由表9数据可知:对各测试样本集几何形状归类成功率最高的是采用策略三(即:智能网格分割策略)构建的斗杆几何形状分类模板,成功率分别为75.1%、74.3%和74.6%;最大波动误差为0.8%,其稳定性良好。几何形状归类失败的斗杆个体将与畸形斗杆个体一样进入知识引导的畸形斗杆结构几何形状合理化自动调整阶段。
获取两组样本个数不同的畸形斗杆样本集,对此两组畸形斗杆样本集进行几何形状合理化调整,以测试畸形斗杆结构合理化调整模块的调整速率及几何形状合理化调整成功率,其计算结果如表10所示。

表10 畸形结构调整模块的调整速率及成功率
由表10可知:该畸形结构调整模块的几何形状合理化调整成功率为100%,对每个畸形斗杆样本进行几何形状合理化调整的平均时间约为0.02s,此调整成功率及速率已足以满足斗杆结构智能优化几何形状约束处理需求。故采用智能网格分割策略与几何形状两级编码相结合的方式,构建的斗杆几何形状分类模板最优,可有效进行斗杆结构优化过程中畸形斗杆的快速识别及几何形状合理化自动调整。
6 小结
本文利用智能网格分割策略与几何形状二级编码网格区间单元响应相结合的方式,构建了多个几何形状特征矩阵表达斗杆结构几何形状分类约束模型,替代了传统复杂数值约束模型,有效实现了斗杆结构智能优化过程中结构几何形状约束的分类表达与处理,是面向系列化设计需求的,可适用于不同机型同结构类型的挖掘机斗杆结构。以中小型挖掘机耳板分离式斗杆结构为例,验证表明:在斗杆结构智能优化过程中,基于特征矩形的斗杆结构几何形状分类约束模型的几何形状归类成功率约为74.6%,畸形结构几何形状合理化调整成功率为100%、速率约为0.02秒∕个,满足斗杆结构智能优化几何形状约束处理需求,解决了数值几何形状约束模型处理速率低、无法实现优化过程中畸形斗杆结构几何形状合理化调整的问题,提高了斗杆结构智能优化过程中几何形状约束处理效率。
猜你喜欢
中华实用诊断与治疗杂志(2022年1期)2022-08-31
现代仪器与医疗(2022年1期)2022-04-19
小学阅读指南·低年级版(2017年1期)2017-03-13
小天使·五年级语数英综合(2016年12期)2016-12-09
小朋友·聪明学堂(2015年7期)2015-11-30
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21
中学生英语高效课堂探究(2011年4期)2011-07-07
中学生英语·中考指导版(2008年6期)2008-12-19
祝您健康(1985年6期)1985-12-30
