基于非接触测量的快轮传感器的设计
2018-08-03 01:03蔡文军孙长征
钻采工艺 2018年4期
蔡文军, 孙长征
(1中石化胜利石油工程有限公司钻井工艺研究院 2中石化胜利石油工程有限公司渤海钻井总公司)
游钩实际位置是钻井自动化系统中非常重要的参数,例如电子防碰系统中,当游吊系统到达防碰预警高度时,缓冲防碰装置发出预警减速信号,SCR 系统接收到该信号后,自动将电机转速降低到司钻设定的速度[1];钻井仪表或者录井系统中,大钩提升或下放钻杆柱直接反映了起钻、下钻的位移与速度,因而对大钩的控制特别重要[2]。通常情况下,绞车滚筒主轴上加装编码器, 计算出大钩实时位置[3]。但这种方式存在如下不足:首先,操作频繁。每次搬家、重排、整理或更换钢丝绳之前都需要对滚筒或者游车进行校准,并输入大量参数。另外,误差比较大。一般情况下存在非线性误差以及人为误差。对于非线性误差,由于旋转编码器测量的是电动机的转速和转角,再通过数学比例转换为绞车的速度和位置,而未考虑钢丝绳直径和滚筒长度,必然会产生误差,误差会随着井深的增加而加大[4]。另外每次人工校准都要对许多参数重新测量,任何参数的测量误差都会导致整体精度的降低;其次,使用这种传感器实现的电子防碰系统在使用过程中故障率高,稳定性、抗干扰能力差,设置的防碰高度、零点经常跳变不能起到很好的保护作用[5]。
为了避免上述弊端,考虑对天车快轮进行测量。由于天车快轮与游钩位置具有严格的线性关系,所以对其测量能够有效消除非线性误差。使用时仅需通过一次校准确定线性系数,存在许多难点:
(1)传感器不能与快轮有任何接触,因为快轮工作时转速很高同时具有很大的惯性,任何接触都会导致传感器的损坏。
(2)不能在快轮上镶嵌任何标志或感应装置,否则会破坏快轮原有的动平衡特性。
(3)不能对快轮本体进行任何机械上的改造,否则会降低快轮的机械强度,带来更大的安全风险。
(4)不能采用任何具有光电效应的传感器,因为快轮工作时会产生大量的油污飞溅,导致光电效应失灵。
(5)天车快轮没有提供可以安装任何形式编码器的接口,所以传统编码器无法应用。
本文介绍了一种能够解决上述难点的非接触传感器,并且对其核心控制技术,即非接触组合扫描方法进行了描述,最后介绍了这种特殊传感器的安装及使用方式。另外,由于国内外目前没有其它类似的方法以及产品,所以本文并没有描述其发展历史以及引用其它相关研究理论。
一、基本原理
为了保证机械强度,快轮在设计时通常在其表面增加有加强筋或者通孔,称之为特征。由于快轮旋转是一个动态过程,这些特征也连续变化。例如当快轮旋转时,从快轮表面上静止的一点观察,会有连续的特征变化,这些特征变化具有周期性,观察点增多,所有观察点所确定的特征组合称之为当前快轮所处的状态。当快轮旋转时,快轮的状态同样也发生连续变化。这些特征的变化规律转换成快轮旋转时的一些状态,就能够计算出快轮的运行参数,例如转速以及累积脉冲等。
目前国内天车快轮表面的特征主要分为两类,一类是针对于小型钻机,一般是40以下钻机,这一类快轮表面无加强筋,主要特征是过孔以及金属面,本文将这一类快轮称为单层结构快轮,如图1(a);另一类针对于中大型钻机,即40以上钻机。这一类快轮表面除此外为了增加机械强度还存在加强筋,本文称之为双层结构,如图1(b)。

图1 两种快轮表面特征
二、组合扫描方法
对于不同的快轮,例如不同的尺寸或表面特征,旋转一周状态的变化规律并不相同。另外,对于相同快轮在不同转速情况下的状态也会发生变化。这就需要让传感器“学习”其所对应快轮的状态变化规律,这一过程称之为“辨识”。当快轮静止或者低速旋转时的辨识称之为静态辨识,这一过程主要是让传感器存储快轮旋转一周的全部状态。当快轮转速逐渐提高过程,其状态也会发生变化,这一过程的辨识称之为动态辨识。对于双层快轮,还要对快轮表面的背景特征进行识别。在快轮辨识以及之后的运行过程中,均需要使用一种本文称之为非接触组合扫描的方法,其设计采用分层结构,从下至上分别是识别层、状态层、解释层以及协议层。本文结合两种典型快轮的表面特征,对其进行分别描述。
1.识别层
识别层又称物理层,由一组非接触模拟量接近传感器组成。对于双层快轮,其排列规律如图2所示。这组传感器呈双列对称分布,并且其圆弧的圆心与快轮圆心重合,该圆弧角度为45°。对于单层快轮,采用单列45°对称分布。

图2 双层快轮传感器的排列形式
每个传感器相当于基本原理所述观察点的功能,其目的是要把快轮金属表面与传感器之间的距离变化转变成可靠的数字信号。快轮旋转时,每个传感器会交替产生具有升余弦特性的脉冲信号。快轮高速旋转时的速度可达720 r/min,对于单层结构快轮,理想情况下(即无配重块干扰),快轮每旋转一周会产生8个脉冲,脉冲频率可达96 Hz。为了将如上波形转换成数字信号,需要进行边沿捕获,使用数字信号处理器很容易实现。这里需要注意,一般这种感应式传感器在某些极限位置有可能发生振荡,当振荡产生时将会导致捕获错误,此时需要进行信号处理,一般采用低通滤波器,图3黄色表示发生振荡的信号,紫色表示经过滤波之后的信号,可以看出在整个振荡周期仅能够进行一次有效边沿捕获。

图3 振荡信号的处理
任意时刻,每个传感器所采集的信号均代表了其所在位置快轮金属表面的特征。对于单层快轮,传感器识别两种特征,当传感器处于过孔位置时其特征为“金属不存在”,处于金属面为“金属存在”。对于双层快轮,除此之外还存在与加强筋相关的特征。另外,传感器对金属面的测量值能够直接体现出快轮的整体轴向偏移,当该值振动比较剧烈时说明快轮运行时的轴向振动也比较剧烈,一般情况下可以考虑更换快轮,所以该值是判断快轮寿命的重要依据。
第一,通过构建生物感知技术,使学生或教师的个人信息拥有高安全性,特别是需要注意数据信息的活动性和运用。在师生的活动建设中能够保证基础测试仪器的完好,使智慧校园的建设拥有物质水平的支持。
物理层具备温控电路,可保证传感器工作在合理的温度范围,保证测量精度。
2. 状态层
任意时刻,每个传感器对应的特征组合称之为状态。每一种状态对应于快轮的某一特定位置,并且可以对其编码,使用特定的数字进行描述。如图4所示,这是单层结构快轮在某一时刻的状态,其中红圈代表的传感器组呈45°对称分布。这里规定传感器组的编号从右向左依次为1~7号。很明显,图中1、2、3、7号传感器处于金属面位置,用逻辑数字1表示“金属存在”,4、5、6号传感器处于过孔位置,用逻辑数字0表示“金属不存在”,这样这组传感器代表的二进制数为1000111,十六进制数为0x47,即当前快轮所处状态为0x47。
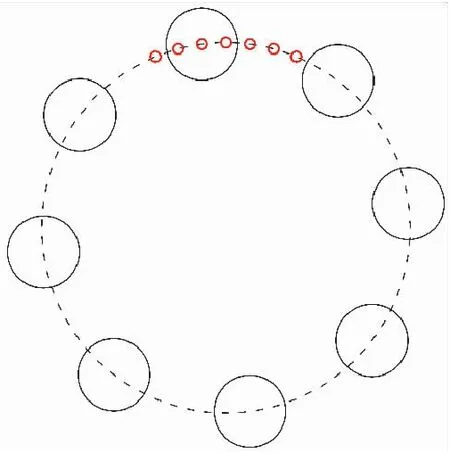
图4 某一时刻的稳定状态
以此类推,当快轮逆时针旋转时,理想状态下其状态变化规律可以依次组成如下状态数组:{0x63,0x43,0x67,0x47,0x07,0x06,0x0f,0x4f,0x4e,0x46,0x0e,0x1e,0x0c,0x1c,0x3c,0x18,0x38,0x39,0x70,0x79,0x31,0x78,0x30,0x71,0x61,0x73} 。静态辨识就是获得该状态数组的过程。
若快轮旋转时这些状态均能被有效检测出来,那么快轮每旋转一周会产生8个周期的状态变化,总计8×26=208个状态。但是随着转速增加,有些状态会变得不稳定,甚至检测不到,这种状态称之为不稳定状态,不会随转速变化而变化的状态称之为稳态。图4所示为稳定状态,图5所示为不稳定状态。当快轮逆时针旋转经过这种状态时,会连续产生如下几种状态,即0000111、0000110、0001111、1001111、1001110、1000110,所形成的状态数组为{0x07,0x06,0x0f,0x4f,0x4e,0x46}。
当转速的超过某一阈值后,该状态数组有可能发生状态丢失现象,而图5仅仅是其中一个不稳定状态。经过分析,在一个状态周期中一共存在六个稳定状态,分别是0x63、0x47、0x0e、0x1c、0x38、 0x71。其它状态均为不稳定状态,不稳定状态分成6个不稳定状态数组分别是{0x43,0x67},{0x07,0x06,0x0f,0x4f,0x4e,0x46},{0x1e,0x0c},{0x18,0x3c},{0x39,0x70,0x79,0x31,0x78,0x30},{0x61,0x73},每两个不稳定数组之间均存在一个稳定状态。当发生状态丢失时,每个不稳定状态数组都有可能发生状态丢失,这种情况必须被系统识别, 前文所提到的动态辨识就是获得不同转速条件下对应的状态数组。

图5 某一时刻的不稳定状态
3. 解释层
解释层的主要功能是将状态的变化转换成计数值。状态数组中的任何状态都可以被设置成起始状态,这一过程对应着使用者的“清零”或者“游钩回零”操作。当某一状态被设置成起始状态之后,该状态也称为计数零点,当快轮顺时针或者逆时针旋转时,系统的状态也会按照上文中所述状态数组的递增或者递减顺序变化,若按照递增顺序变化一次,即进入到相邻的下一个状态,则系统的计数值加一,反之减一,这样就将传感器相对于起始位置的位置变化转化成计数值。例如,使用者在状态0x0e进行了“清零”操作,那么当系统状态变化为0x46计数值为-1,若状态变化为0x1e,那么计数值为1。
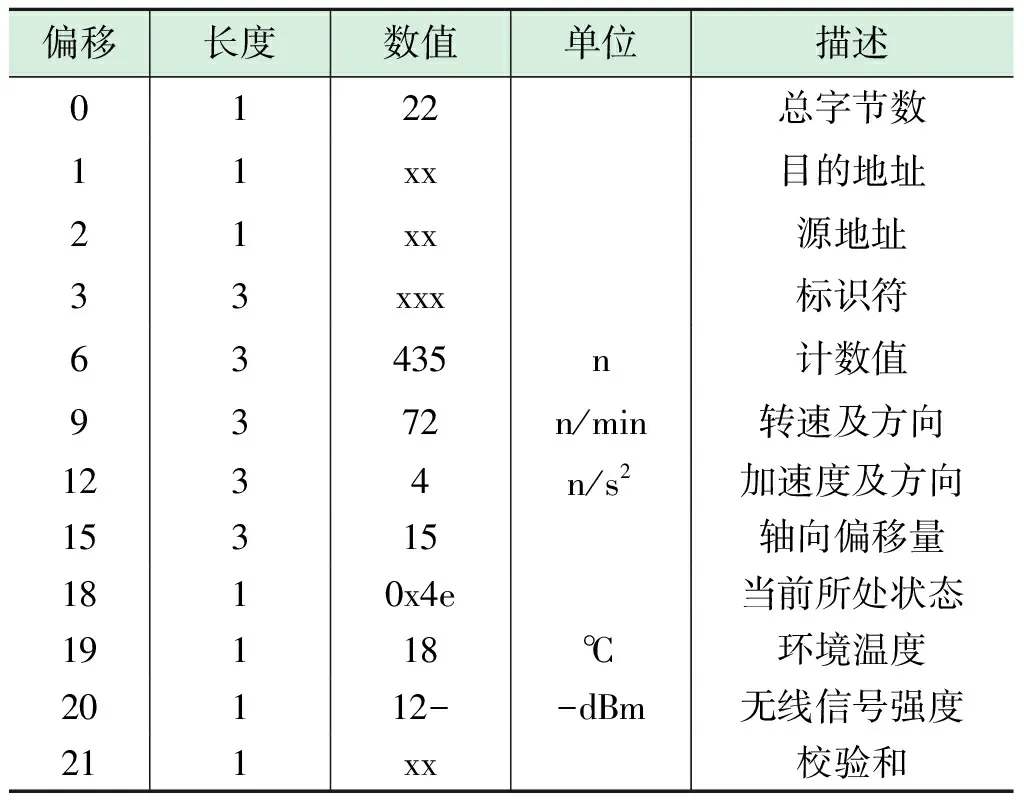
表1 通信协议举例
4. 协议层
三、 传感器的安装及使用
前文已经介绍,传感器组的中心线必须与快轮的中心线重合。如何保证可靠精确的安装是一难题。本文提出了一种安装方式,通过重新设计天车快轮钢丝绳防跳槽支架实现。将传感器通过螺栓固定在支架上,然后将防跳槽支架安装至快轮即可,这样的安装方式即不影响快轮运行,又保证传感器能够可靠的扫描快轮表面。固定后的传感器以及快轮的安装如图6所示。

图6 传感器安装方式
本文所述传感器能够输出原始的增量型计数脉冲,也能够以标准Modbus数据帧的形式通过现场总线进行访问。由于该传感器安装的位置在天车快轮旁边,与上位机或者控制系统的距离比较远,所以本文提出了一种无线通信解决方案。系统由非接触传感器(天车),将数据信号从节点无线收发单元(天车),传输到主节点无线收发单元(司钻房外侧),从而在人机界面(司钻房内部)上显示。非接触传感器供电来自于天车头上的探照灯电源,这样钻机在搬家过程中也无需拆线,使用非常方便。
四、 结论
本文介绍的新型传感器采用了非常独特的非接触组合扫描技术。目前,中石油和中石化的部分钻机已经安装有基于这种传感器的电子防碰以及钻井仪表系统,效果明显。从现场实际使用的反应来看这种传感器的特点如下:①非接触测量。无需对快轮本体进行任何改造,不影响快轮的机械强度;②精度极高。无线性误差,测量精度优于滚筒编码器;③无需校准。出厂后无需校准,省去了繁琐的标定过程;④通过快轮的轴向振动判断快轮的工作情况。
目前该系列传感器已经进入到第三代,更新了核心算法,同时系统固件中已经固化了目前国内主流厂家快轮的特征矩阵,省去了辨识过程,实现了即装即用。
猜你喜欢
电脑报(2022年13期)2022-04-12
软件(2021年3期)2021-08-17
东北大学学报(自然科学版)(2020年12期)2020-12-18
学生天地(2020年14期)2020-08-25
电脑报(2020年24期)2020-07-15
山东工业技术(2018年21期)2018-12-07
特别文摘(2018年3期)2018-08-08
电脑爱好者(2017年22期)2017-12-04
诗选刊(2015年6期)2015-10-26
初中生之友·中旬刊(2015年4期)2015-06-10