
一种基于岸基多雷达的船舶监视管理系统
2018-08-28 01:59汪永军莫红飞闫冯军钞红光赵海林
舰船电子对抗 2018年3期
汪永军,莫红飞,闫冯军,钞红光,赵海林
(中国电子科技集团公司第三十八研究所/中电科技(合肥)博微信息发展有限责任公司,安徽 合肥 230031)
0 引 言
近年来,为了加强对海洋资源的合理开发和利用,特别是渔业资源,避免过度捕捞,追求渔业资源可持续发展,各个省份都制定了休渔期,在休渔期间,严禁渔船在海面非法捕捞,给渔业有休养生息的机会。但目前缺乏对现有船只的信息化管理与监控,导致偷捕、滥捕和逃避监管的情况时有发生,沿海各个省份监管部门海洋渔业执法大队也因缺乏信息化手段,无法及时有效地执法,导致执法效率低下,成本很高。
综合来看,目前的渔业监管存在以下痛点:
(1) 在休渔期间,经常有偷捕发生,无法及时监管,影响渔业生态。
(2) 无法实时监视非法挖沙、盗采行为,威胁内河及海岸堤坝安全。
(3) 在军事演习区,无法监视是否存在船只非法误入?
(4) 台风或地震等重大海况发生时,无法实时感知海面船只情况,是否有未归港船只?
(5) 海难发生时,无法快速救援,为船只提供救援服务。
(6) 海难发生后,没有数据记录与回放,不能辅助分析事故原因,从而避免下次事故。
利用岸基雷达的主动探测性能,在沿海布局雷达站点,对海面船只进行全天候24 h的监视,结合视频监视技术,将雷达和视频联动处理,并融合雷达与舰船识别系统(AIS)信息,提高目标跟踪的准确度,全面提升对沿海涉渔涉海违法违规行为情报获取能力和精准打击水平,降低执法成本,提高执法效率,同时为船只正常通航、海上救援提供服务。
1 系统架构
1.1 系统架构描述
系统在架构上可划分为雷达综合应用平台、网络通信子系统及外场子系统3层应用。雷达应用平台的核心是机房系统,机房系统部署雷达综合应用系统软件、后台数据处理模块;网络通信子系统构筑外场子系统数据上传和雷达综合应用平台各种控制指令下发的通信网络;外场子系统包括雷达监测子系统、闭路电视(CCTV)视频监控子系统、AIS子系统、甚高频(VHF)子系统等。
系统主要组成如下:
(1) 雷达设备;
(2) AIS设备;
(3) CCTV视频监视设备;
(4) VHF通讯设备;
(5) 雷达数据处理模块;
(6) 视频流媒体服务模块;
(7) 船舶数据管理模块;
(8) 信息记录及回放模块;
(9) 多源传感器的数据融合和大数据分析与决策支持子系统;
(10) 船舶交通综合显示与控制子系统。
系统整体架构示意图如图1所示。

图1 系统架构
雷达设备、AIS设备、CCTV视频监控设备、VHF通讯设备属于整个系统的4种传感器,一般集中在一起,架设在海拔大于80 m的铁塔之上,以满足雷达作用距离大于50 km以上的视距要求。
雷达综合应用平台设立在渔业监管中心,由多台服务器组成,用户显示席位数量根据需要设置,服务器和席位电脑通过局域网互联。
此外,雷达综合应用平台可以与现有的其他设备和系统互联,如北斗/全球定位系统(GPS)、气象子系统、渔船身份识别系统等。
系统具有便利的数据接入及功能扩展,具备接入40个雷达站点能力。中心站与雷达站使用现有的公共光纤网络或4G无线网络传输数据。
1.2 系统工作流程
雷达是系统中核心的传感器设备,具有主动探测、不受天气和光线影响等优点。雷达发射脉冲电磁波,接收海面上各类船只反射回来的回波,进行抗同频干扰、海杂波、雨雪杂波和视频积累处理。同时需要建立固定地物杂波图,滤除地物、海岛、灯塔、桥梁等固定目标,然后根据信噪比提取移动的船只目标、获得船只的位置信息。
雷达跟踪处理软件根据连续运动的船只生成一条航迹,实时跟踪船只的具体位置,系统可以计算船只的位置与CCTV摄像头位置角度差,控制摄像头在水平和俯仰方向的转动角度,定位摄像头至船只的方向,根据船只与摄像头的距离计算镜头焦距,实现雷达与摄像头云台的联动,完成对船舶的视频记录或图片抓拍。
AIS设备接收雷达站点周围船只主动推送的船舶信息(船名、水上移动业务标识(MMSI)、经纬度、类型等),然后将数据转发给雷达处理器进行数据融合,提高船舶跟踪的精度。每个AIS设备通讯距离达到150 km以上。
VHF通信设备用于岸基与海上船只之间的无线对讲通话,一般用于海上交通指挥或应急救援。
各个传感器的数据全部转换成网络接口,接入交换机,通过公共光纤网络或4G无线网络传送至渔业监管中心的雷达综合应用平台,雷达数据处理流程如图2所示。

图2 雷达数据处理流程
在渔业监管中心可以实现以下功能:
(1) 对海上船舶实时监视,实现24 h、全天候值班。
(2) 实现雷达与摄像头云台的联动,抓拍取证,提供执法依据。
(3) 显示船舶的详细信息(船名、MMSI、经纬度、类型等)。
(4) 建立属地船舶数据库,辖区内非属地船舶列表显示,提醒执法。
(5) 接入渔船电子身份标签系统,跟踪渔船位置,强化禁渔期船舶监管。
(6) 各类报表统计(船舶类型、在港船只、出港船只、融合船只)。
2 关键技术实现
2.1 自适应固定地物杂波滤除
雷达站架设在海岸边,除了接收到感兴趣的船舶反射回波外,也会接收到无用杂波(海岛、海岸线、灯塔、跨海桥、陆地、山峰),系统通过建立固定地物杂波图,将接收回来的回波与固定地物杂波图对消,只留下移动的船只回波信息。为保证固定地物杂波图与地形地貌相匹配,杂波图需要较长时间建立,避免受到慢速船只或雨雪天气干扰。同时为了增加系统的自适应能力,杂波图必须是动态适时调整的,当新建、改建雷达站点时,周围地物环境发生变化,固定地物杂波图能够自适应变化。
系统对进入数据处理的包含杂波的点迹数据进行积累和统计,首先将雷达探测范围进行网络划分为方位距离单元,在雷达工作过程中实时判别各网络单元对应的区域是否存在杂波或受到干扰,对固定地物杂波区进行判别和标识,主要根据点迹回波幅值和固定点迹密度来建立地物回波杂波图,可在方位和距离上使用极坐标系对杂波图进行环形划分网络单元,从正北方向由内向外依次对方位距离单元编号,如图3所示。

图3 网格单元划分
设zij(k)(i=1,…,nk,j=1,…,mk)为第k帧、第i个单元、第j个测量点迹,Z(k)为第k帧扫描得到的网络单元集,即:
Z(k)={z1(k),…,znk(k)}
(1)
第k帧的每个单元量测:
zi(k)={zi1(k),…,zimk(k)}
(2)
式中:∀zi(k)∈Z(k),i=1,…,nk。
雷达扫描到每个单元zi(k)的一个方位上,根据回波幅值对该方位上的每个点迹进行统计,统计区间分为n1段,每段分为n2帧,每段经过n2次雷达扫描周期。对同一单元同一方位同一点迹zij(k)位置上的幅值求均值,若平均幅值大于零,则标记该点迹位置的对应段,依次类推n1段。若标记值在总段数中比例较大(大于一定比例系数),则把对应点迹记为固定杂波点。遍历网络单元的每个方位,统计每个单元格单位面积上的固定点迹数(点迹密度)。若固定地物点迹密度大于杂波门限值,则可直接将对应网络划分单元格标识为固定地物杂波区。依此原理,采用滑窗法按照方位距离单元累计到当前的一段时间内(时间窗长度,其依据:雷达扫描周期或数据处理周期)落入各单元格的固定点迹数量,计算各网络单元的固定地物点迹密度。根据判别门限标识单元格状态,动态实时更新杂波图,实现系统的智能化应用。固定地物杂波滤波前后对比如图4所示。
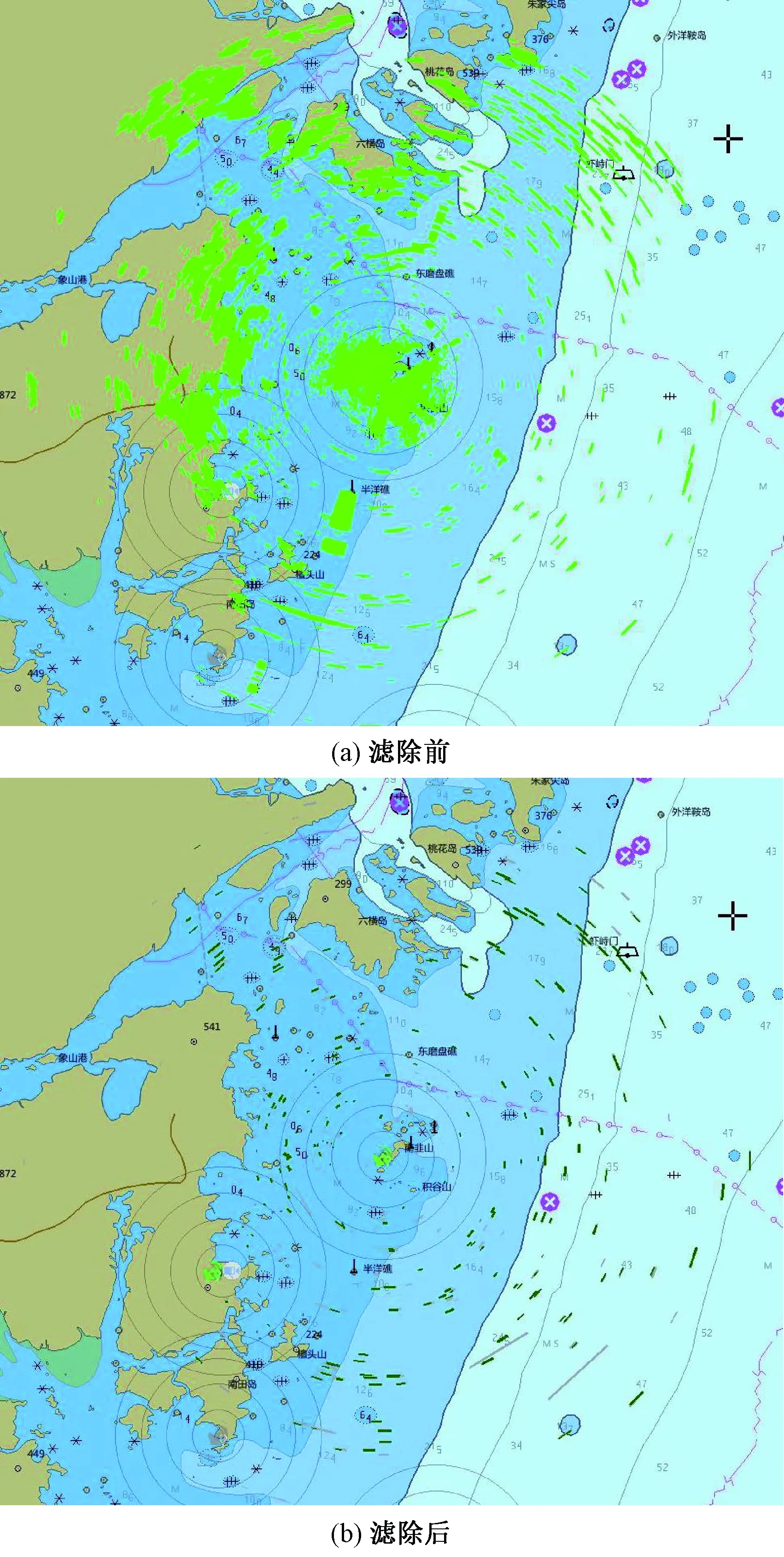
图4 固定地物杂波滤除前、后对比
2.2 系统健康状态诊断
系统采用磁控管体制的大功率船用导航雷达作为监视设备,该雷达性价比高,适合民用。但因磁控管工作频率会随着温度变化而漂移,导致雷达发射机未处于最大功率下工作。为实时检测雷达健康状态,系统针对每个雷达站选取3个固定参考点,采用雷达回波能量比较检测法。当回波能量下降至正常能量80%时,复位系统进行频率调谐处理,找到磁控管最佳工作频率。
系统对雷达综合应用平台、网络通信及外场子系统进行机内自测试(BIT)设计,实时将主要部件/设备状态(雷达发射触发、回波、方位、船首、AIS设备、CCTV摄像头、VHF设备、网络、各个软件模块)发送至雷达综合应用平台,在渔业监管中心即可监视系统故障、准确定位并及时排除,如图5所示。

图5 系统健康状态诊断
2.3 多源数据融合
本系统数据源由多部雷达、多个AIS组网而成,同一船只在2个雷达站威力覆盖重叠区域会被分别探测,生成2组数据,如图6所示。

图6 多源数据融合
系统必须实现多雷达对同一船只探测数据的融合,需要对多雷达的点迹/航迹数据的时空配准、误差补偿、相关处理、点迹合并求精、目标跟踪滤波等处理。对2个雷达威力重叠作用区域,发现概率分别为Pd1、Pd2,则雷达网的发现概率为:
PD=1-(1-Pd1)(1-Pd2)
(3)
如Pd1=0.5、Pd2=0.8,根据公式(3),则2个雷达威力重叠作用区域融合后发现概率PD为0.9,提高了发现概率。
除了雷达与雷达之间的数据融合外,雷达目标与AIS目标也需要融合,并将雷达目标与船舶信息数据库进行匹配关联,实现船舶目标分类识别。
2.4 雷达与摄像头云台联动
系统采用“点”、“面”结合技术,“面”是由雷达监测而获得目标显示的大画面,“点”是通过摄像头云台捕捉大画面中的细节,从而达到“无盲区、无死角”全方位不间断地监控,云台可自动跟踪大画面中的多个目标。可在大画面监控界面上随意调出任意局部细节并放大观察,满足快速搜索、全局控制的要求,方便工作人员的使用。
系统支持高清CCTV摄像头功能,可以清晰看到近距离范围船舶的船名、船舶编号等。摄像头的红外功能保证夜晚能见度低时仍然可以对船舶进行重点监控,能够预判船型、大小及种类等,并能够对航迹、违规行为进行记录回放,能够根据用户在屏幕上的点击等操作跟踪所选择的船舶。
当需要跟踪特定船舶或者监控特定海域时,系统将根据目标或者区域的位置信息(主要包含距离与角度,当进行目标跟踪时,需要雷达基站额外输出目标大小信息)自动计算出该目标或者区域的经纬度信息,并将该经纬度信息传递给目标跟踪服务。该服务依据此位置信息,自动判断哪个摄像头离该目标或者区域最近,并根据该摄像头的位置信息(经纬度和实际架设高度)计算出俯仰角度和焦距信息,最后通过开放型网络视频接口论坛(ONVIF)协议进行云台全方位移动及镜头变焦(PTZ)控制(该协议可以兼容国内主流的摄像头生产厂商),使摄像头转动到指定位置。
俯仰角计算过程如下:
设摄像头的经纬度为(P1,P2),目标或者区域的经纬度为(P3,P4),按照0°经线的基准,东经取经度的正值,西经取经度负值,北纬取90-纬度值,南纬取90+纬度值,则经过上述处理过后的2点被计为(Q1,Q2)和(Q3,Q4)。那么根据三角推导,可以得到计算2点距离的如下公式:
C=sinQ2·sinQ4·cos(Q1-Q3)+cosQ2·cosQ4
(4)
D=R·arccosC·π/180
(5)
俯仰角:
θ=arctan(H/D)
(6)
式中:R为地球半径,并假设地球为一个完美球体;D为摄像头和目标之间的距离;H为摄像头的架设高度。
焦距计算方法如下:
f=W1L/W2
(7)
式中:f为镜头焦距;W1为图像的宽度(被摄物体在电荷耦合器件靶面上成像宽度);W2为被摄物体宽度;L为被摄物体至镜头的距离。
2.5 记录回放[1]
系统默认记录雷达目标航迹、AIS数据和CCTV视频,便于船舶历史轨迹查询、证据提取,为执法部门提供判断依据。通常情况下雷达目标航迹、AIS数据记录保存6个月以上,CCTV视频保存3个月以上。
选择船舶历史数据回放时,系统连接到船舶历史数据库,根据选择的回放时间、设置的回放参数开始历史数据回放,回放过程以符合海洋渔业管理行业习惯的方式进行。同时支持船舶历史数据的导出功能,满足用户在其他平台使用数据进行交流和学习,记录回放如图7所示。

图7 记录回放
2.6 综合显示与控制[2]
综合显示与控制主要包括船只探测及识别、目标显示、绘制、报警、指挥调度、记录回放、船舶实时监控和查询服务、设备运维、统计分析以及系统设置等功能。
以电子海图为基础,汇集雷达、AIS、CCTV视频、目标信息、气象水文及工作状态等多传感器信息显示与控制,支持放大缩小及快速定位操作,支持多种显示比例尺选择,支持多窗口多屏显示;目标信息包含目标的动态信息(如:目标位置、目标航行状态等)和静态信息(如:船舶类型、船舶参数等),气象水文主要包括台风、浪高、潮汐等,用户可以通过鼠标滚轮放大缩小或者拖动对人机界面进行操作,如图8所示。
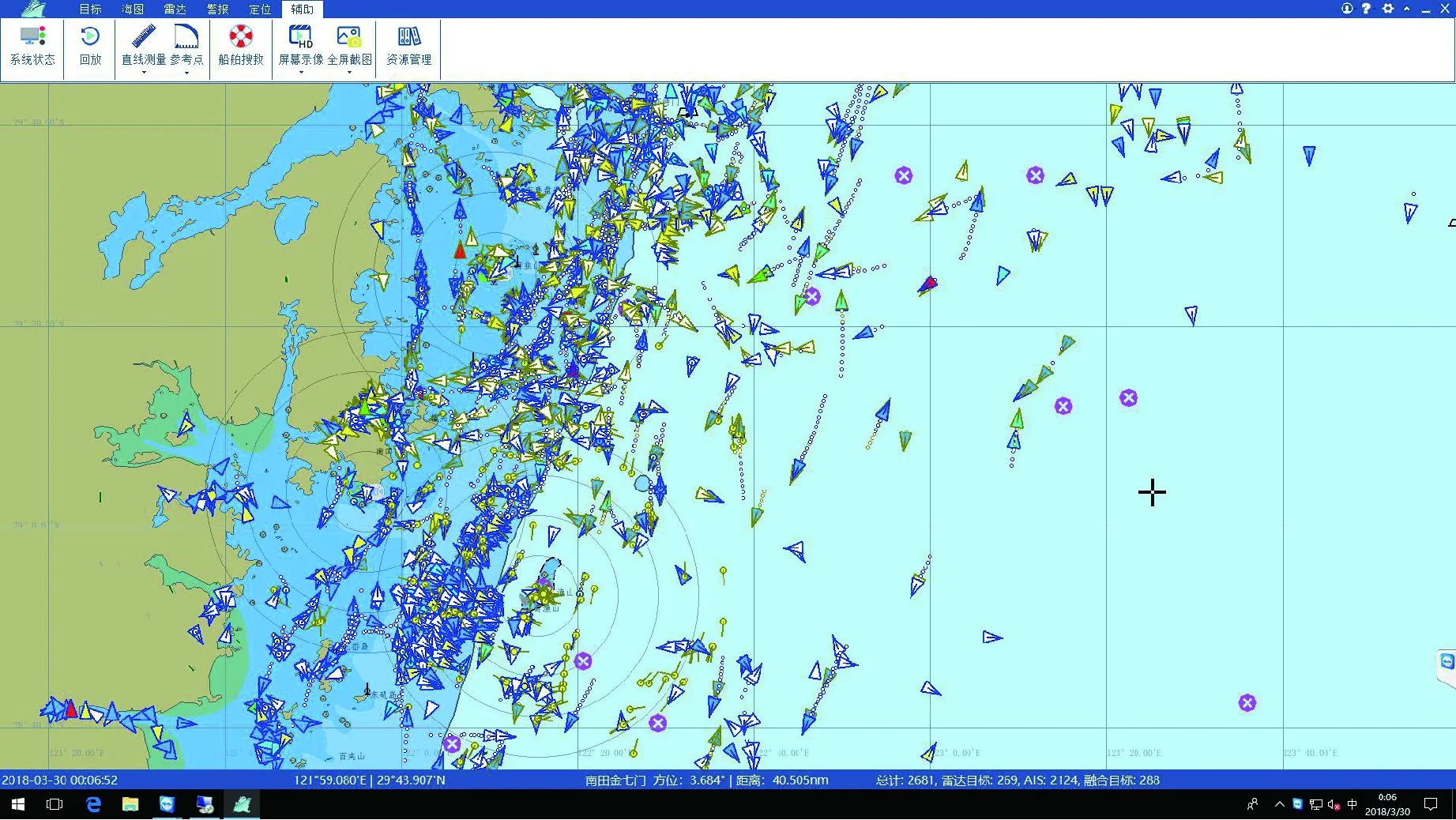
图8 综合显示与控制平台
系统支持多个操作席位同时在线访问服务器,席位数量根据值班人员需要设置,支持不同席位不同功能需求(如:部分操作席位实时监视船舶动态,其他席位用于回放特定时间段的数据记录,以及事故分析和执法调查,互不影响)。
3 试验结果
系统已经在石浦港、小鱼山岛、南韭山岛和渔山岛进行了实地架设,选择周围视野开阔、无遮挡区域架设铁塔。雷达安装在铁塔之上,铁塔高度满足雷达视距要求,根据实际需要可以选配天线罩,保护天线不受台风等恶劣天气影响,如图9所示。
每个雷达站点所有设备电源功率在2 kW以内,原始数据经过实时处理转换成目标数据或视频后,经过通讯网络发送至雷达综合应用平台,中心站综合应用平台软件以电子海图为背景层,叠加显示雷达目标、AIS目标、雷达与AIS融合目标、其他系统接入的目标数据等。系统整体功能验证效果如图10所示。

图9 海岸边铁塔架设雷达

图10 系统整体功能验证效果
猜你喜欢
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
电脑知识与技术(2016年3期)2016-04-07
环球时报(2012-03-13)2012-03-13
现代计算机(2011年11期)2012-01-09
