
用单片机和霍尔传感技术设计小型磁悬浮列车
2018-08-31 07:45许释文李德安徐怡冰卢汉辉于智杰黄秋怡
物理通报 2018年9期
许释文 李德安 徐怡冰 卢汉辉 于智杰 黄秋怡
(华南师范大学物理与电信工程学院 广东 广州 510006)
近年来,我国科技发展迅速,磁悬浮列车技术也得到相应地发展.虽然磁悬浮列车的研究和制造涉及的学科众多、技术难度大、工艺复杂,但它具有速度快、污染小的优点,优于所有目前城市交通工具.
根据现实生活中的磁悬浮列车运行原理,并通过查阅和学习相关知识,下文给出了一个创新性的小型磁悬浮列车设计方案.
1 小型磁悬浮列车设计总体方案
总设计方案应包括轨道和小型磁悬浮列车.轨道可采用“工”字型轨道,其横截面是“工”字型.而小型磁悬浮列车由3部分组成,分别为悬浮系统、导向系统及推进和制动系统.各系统的具体设计将在后文详细讨论.整体的横截面图设计如图1所示.

图1 小车和轨道横截面图
2 悬浮系统的设计
目前磁悬浮列车实现悬浮主要有两种方式:一种是利用常导电磁铁吸引力,另一种是利用超导电磁铁在行走中产生的相斥力.对比两种方法,后者所需的超导材料价格较为昂贵,所需低温条件也较难实现.
因此,可尝试采取前一种方式,在轨道上铺设铁皮,在小车上安置电磁铁,通过超声模块测距、单片机控制电磁铁电流来实现小车与轨道的距离控制.但市面上的电磁铁大多都是吸盘式的,其在36 V电压以下所产生的吸引力随距离的增加而呈指数式衰减,故只有在距离相当近(1~2 mm)的时候有明显吸力,超声模块的精度无法到达相应的要求.
故采用永磁体同性相斥来实现小车悬浮,在小车下部以及轨道上部均铺设磁铁.对比用引力实现悬浮,斥力悬浮系统是自稳定系统,所以无需考虑悬浮高度的调节.此外,采用永磁体技术替代电流控制的悬浮系统,降低了电路控制难度及减轻了电源的压力.
3 导向系统的设计
生活中的磁悬浮列车的稳定性由导向系统来控制.但在实际制作过程中,不建议采用电磁力控制的方案来制作小型磁悬浮列车.原因如下:
一是用电磁力来实现导向的难度很大.用吸力方案来导向,会发现电磁铁对磁铁或者硅钢片的吸力会随着电磁铁到硅钢片的距离的增加呈指数衰减,因此用吸力方案远达不到实现导向的要求.采用斥力方案,小车容易往两边倾斜,不能保证其稳定性,实现导向的操作难度大.
二是用来导向的电磁铁或者磁铁的磁性会干扰悬浮系统.导向电磁铁产生的磁场以及导向磁铁的磁场,会和悬浮系统的磁铁产生的磁场相互耦合,不利于悬浮系统的稳定.
因此,推荐采用一种“独辟蹊径”的方式实现导向,即用4个轮子“抱”住轨道.当小车运动时,导向系统的轮子就如正在行驶的车一样,位于自制轨道的侧边运动,既可以让运动着的小车稳定,也可以帮助小车加速运动.除此之外,还有一个好处,如果给小车加重量,用来导向的轮子所受到的轨道给它的摩擦力是不会增加的.
因此,采用4个定滑轮在侧边“抱”住轨道,既解决了和悬浮系统相互耦合的问题,也减轻了复杂的制作要求.达到既简单又可靠,且性能稳定的效果.
4 推进和制动系统的设计
实际生活中的磁悬浮列车的高速前进是利用电磁体间的磁力完成的.简单的讲就是,在位于轨道两侧的线圈里流动的交流电,能将线圈变为电磁铁.由于它与列车上的电磁体的相互作用,就使列车开动起来.列车前进是因为列车头部的电磁体(N极)被安装在靠前一点的轨道上的电磁体(S极)所吸引,并且同时又被安装在轨道上稍后一点的电磁体(N极)所排斥.
当列车前进时,在线圈里流动的电流流向就反转过来了.其结果就是原来那个S极线圈,现在变为N极线圈了,反之亦然.这样,列车由于电磁极性的转换而得以持续向前奔驰.根据此工作原理并结合单片机编程和手机蓝牙技术,可得如下推进和制动系统的方案.
4.1 推进和制动系统的原理
线圈通电产生磁场(右手定则);磁铁同性相斥、异性相吸原理;霍尔传感器感受磁场强度并转变为电信号.
4.2 推进和制动系统的设计方案
如图2所示,轨道上表面由永磁铁按照以上布局排列而成;车身底部由3组线圈和一个霍尔传感器构成,线圈包括线圈A1和A2;线圈B1和B2;线圈C1和C2,且线圈的排列需要满足图2所示的布局.其中线圈A1与A2串联,线圈B1与B2串联,线圈C1与C2串联.
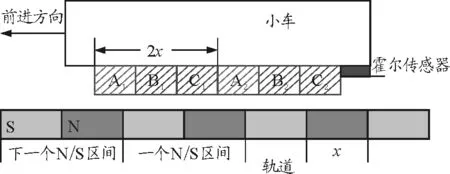
图2 推进和制动系统的结构图
线圈A1和A2;线圈B1和B2;线圈C1和C2的通电是由单片机控制的,手机通过蓝牙发送信号给单片机,单片机开始运作,霍尔元件接收到信号,将信号传递给控制线圈通电的单片机,导通线圈A1(如图3所示),线圈A1和A2产生如图所示S极磁场,与轨道上的磁场同性相斥、异性相吸,推动小车向前行驶.
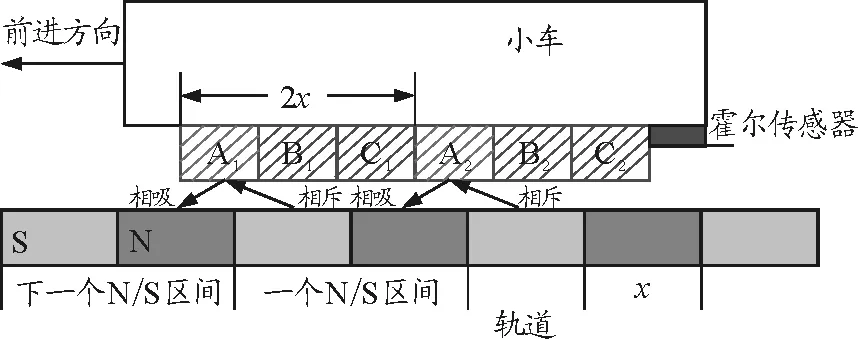
图3 推进和制动系统的运行原理图
当线圈B1和B2到达原先A1和A2所在的位置,此时,霍尔传感器接收到相应的信号,并将信号传递给控制线圈通电的单片机,断开线圈A1和A2上的电流,并接通线圈B1上的电流.
此时,线圈B1和B2在同样的位置产生同样的磁场(在刚开始时线圈A1和A2的位置,产生相同的S极磁场),再次重复开始时线圈A1和A2的过程,小车前进.
线圈C1和C2亦是同理.
当线圈A1和A2;线圈B1和B2;线圈C1和C2依次通完电后,线圈A1和A2来到了下一个轨道上的N和S极区间(一个N和S极为一个区间,小车轨道由许多个这样的区间构成),且此时线圈A1和A2相对于轨道上距离最近的N极的位置和刚开始时的相同,霍尔传感器接收到相应的信号,再次接通线圈A1和A2,重复上述过程,不断拉动小车向前行驶,小车便动了起来.(霍尔元件反应时间很快,表现出来小车一直向前行驶)
制动系统:手机通过蓝牙发送“暂停”的指示给单片机,第一组线圈导通,其他线圈截止,小车受磁场作用,慢慢停下来.
4.3 电路图和输入波形
(1)电路图参考如下.
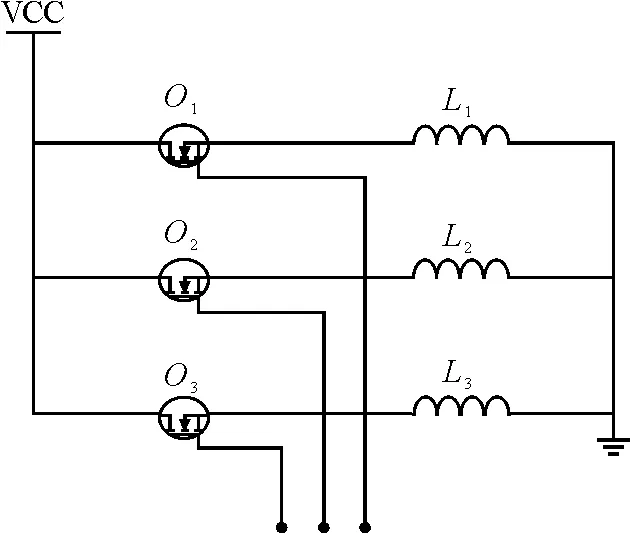
图4 电路图
(2)L1,L2,L3这3组线圈输入波形参考如下.
线圈L1,L2,L3分别对应小车底部的A1串联A2,B1串联B2,C1串联C2.

图5 输入波形图
5 结束语
本文根据现实生活中的磁悬浮列车原理,详细给出磁悬浮小车各系统的设计方案.各系统设计工艺及原理符合大学生的能力及知识应用水平,本方案具有较高的可行性.
此外,本方案设计的小车在运动过程中所受摩擦力小、可控、低功耗,具有广阔的应用前景.其侧轮与轨道的摩擦力不受小车重量影响,且轮子与轨道是滚动摩擦,由此而产生的摩擦力几乎可忽略.因此,只需要给小车提供很小的牵引力就能启动,并能快速前进.值得一提的是,本方案能进行推广应用,可通过简单改造应用于磁悬浮列车技术的研究,亦可在物理教学中起到较好的演示作用.
创造能力是衡量人才质量高低的标准,未来社会的发展与竞争归根到底是创造能力的竞争.目前,我国的高等教育提倡提高大学生的创新能力、思考能力、动手动脑能力和实践能力.小型磁悬浮列车的制作,不仅提升了大学生的动手能力、思考能力和实践能力,还能使大学生熟悉各系统的运用原理及如何设计和改进作品、了解磁悬浮列车的发展前沿.还能引导大学生关注社会发展、科技发展,从中发现问题并能为以后的科技发展提供新思路和新方法,为社会发展贡献自己的力量.
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
科学技术创新(2021年22期)2021-08-16
防爆电机(2021年2期)2021-06-09
时代农机(2019年5期)2019-08-17
童话王国·文学大师班(2017年6期)2017-07-10
科学大众(中学)(2017年2期)2017-03-21
军事文摘(2016年14期)2016-04-04
