基于机器视觉动态选茧系统的研究
2018-09-10 09:52杜昕刘文烽林毅坚
企业科技与发展 2018年4期
关键词:蚕茧
杜昕 刘文烽 林毅坚


【摘 要】在缫丝的生产加工中,要先对蚕茧进行分选,剔除残次茧,确保优良茧转到缫丝工序。文章主要研究的是分拣装置的视觉系统识别部分,利用照相机对蚕茧进行拍照,通过图像处理、识别,选出不同的残次茧。对残茧进行坐标标定,并将识别的定位保存,准确地传到下位分拣机器人系统,完成分茧定位。
【关键词】蚕茧;视觉系统;坐标标定
【中图分类号】TP242.2 【文献标识码】A 【文章编号】1674-0688(2018)04-0091-04
0 引言
在缫丝的生产加工中,由于蚕本身体质和结茧时的环境不同,以及受收茧、烘茧、运输等影响,所以往往有一部分难以缫制高级生丝的次茧和不能缫丝的下茧,为得到优良的蚕丝,需要剔除这些蚕茧。传统工艺使用的是人工肉眼识别法,这样容易存在识别标准的不同而误选,在高强度的工作中,人工识别也会使错误率提高,从而导致效率低下,所以有必要设计一个多残茧分拣装置来提高工作效率,降低错误率。
1 蚕茧的种类
蚕茧种类繁多,有上茧、双宫茧、黄斑茧、穿头茧等(如图1所示),其特征见表1,其缫丝过程用的是优质蚕茧,即上茧,因此我们可以根据蚕茧特征的不同,剔除掉不合格的蚕茧。蚕茧特征的不同,相应的检测方法也不同。
2 视觉识别与定位系统结构图
选茧系统装置的视觉系统主要由照相机和光源构成。视觉系统示意图如图2所示。
3 机器视觉识别方案
机器视觉对蚕茧进行识别,系统框图如图3所示,对每一帧图片进行识别与定位。
4 视觉系统的实现
4.1 视觉识别原理
视觉系统是指用搭好的视觉装置对待检测物体拍照,并将所拍的照片进行图像处理,将图片上的内容信息即物理量转化成计算机可处理的数字信号,再将提取照片信息与先前提取的信息做对比后进行判别,最后将结果传送至控制系统。
机器视觉犹如人类感官,当人看到某张图片时,大脑会迅速反应出这张图片是否见过类似的,这并不是我们的大脑对这张图片的记忆进行识别,而是对其自身的特征进行分类,利用这些类别的特征识别出的。机器视觉系统进行图像识别也是如此,对所拍到的图片进行特征提取,将多余的没有用的信息加以排除,以此来实现图像识别。利用相机和计算机等模拟人类的眼睛和大脑来实现视觉功能,其目的就是对相机所采集的图片内容进行处理和辨识。简单地说,就是让相机代替人眼去看东西,计算机代替人脑将看到的东西加以识别和判断。
4.2 视觉系统的组成
视觉系统的硬件组成包括相机、镜头和光源,所以选择好相机、镜头和光源显得尤为重要。
4.2.1 相機的选择
由于我们只对蚕茧进行识别,所以选用黑白相机即可,但是我们所要实现的是动态分拣,从而拍照必定是动态时捕捉影像,为了使所拍的照片清晰,且相机的延迟降到最低,我们对相机的要求也有所提高,最终我们采用康耐视IN-SIGHT8400智能相机,这款相机拥有500万像素,速度为15×,图像捕捉率为200,分辨率为640×480。它的优点是可直立或以合适角度部署,这款相机虽外观小巧,却配有高性能视觉工具,并拥有较快的通信速度和较高的分辨率,是在有限空间使用的理想选择。
4.2.2 镜头的选择
镜头采用“C”形接口镜头,是一款使用很广泛的镜头。它能在整个视野提供均匀的分辨率,是可手动调整的高性能镜头,在镜头大小、光圈和焦距方面可提供最灵活的选择。在提取图像特征时,为使图像不出错,我们应保证相机的成像大小小于镜头的成像,如下式所示:
其中,V为拍摄物体的垂直方向高度;H为拍摄物体水平方向的长度;D为镜头到拍摄物体间的距离;v为相机画面的垂直方向高度;h为相机画面的水平方向高度。
经过计算,最终选用5 mm的镜头,将相机与镜头组合完成后放置在传送带上方,高度为540 mm,拍摄范围为200 mm×300 mm。
4.2.3 光源的选择
光源的选择在该系统中也起着至关重要的作用,它能直接影响实验数据的质量和实验效果。通过对比各种光源的特性(见表2),我们采用长条形400 mm×3 mm的LED作为光源,这款光源价格较为便宜,功率小,使用寿命长,且能均匀照明,完全符合选择光源的条件。
将选好的长条形LED光源分置在传送带的两侧,高度为270 mm,与水平面呈45°,目的是为了增强蚕茧的轮廓和形状,使蚕茧受到的光照强度是一样的。并且,利用遮光布将拍照区域遮挡起来,避免了自然光对实验结果的影响,使蚕茧与背景得到最佳分离,降低了图像处理过程中的分割和识别难度。
同一种光源亮度不同,同样也是会影响实验的(如图4所示)。从[图4(a)所示]可以看出在弱光情况下,几乎看不到蚕茧,更谈不上识别;在强光[如图4(c)所示]的情况下,蚕茧可以清楚地被拍到,但由于光线过强,蚕茧表面的斑点无法被拍到,从而导致一些下茧无法被识别;在光线适中[如图4(b)所示]的情况下,既能清楚地看到蚕茧的形状外观,又能看到有些灰黑色的阴影斑点。
4.3 图像处理
由于在数字化过程中的量化噪声,以及传输过程产生的误差及光照强度等因素,所以图像经过形成、传输、接收和处理流程后,最终得到的图像质量很差,清晰度降低,使有效信息提取困难,所以需对图像进行处理,以便对图像进行分析和识别。图像处理包括滤波、图像二值化、图像分割等。
4.3.1 图像滤波
滤波是图像处理中必不可少的操作步骤,就是为了在尽可能地保留图像细节特征的条件下,对目标图像的噪声进行抑制。蚕茧边缘不是光滑平整的,可利用滤波有效地去除周边的毛絮,方便后续的识别。根据图5我们可以清楚地看到,不同滤波对蚕茧的效果,通过比较,最终我们采用双边滤波,这款滤波方式使边缘保存比较好,而且凸显了图像的特征。高斯滤波则使图像变模糊,均值滤波则使图像的特征被损坏。
4.3.2 图像二值化
图像的二值化使图像变得黑白分明,使图中数据量大为减少,从而能凸显出目标的轮廓(如图6所示)。蚕茧与传送带原本就黑白分明,我们可以不考虑使用图像的二值化,但在实际操作当中,由于皮带会产生一些漫散射光线,有时会对后续蚕茧识别造成影响,所以我们选择使用二值化,将无需考虑的特征因素排除。
4.3.3 图像分割
相机每拍摄一版图片,图片中都有很多个蚕茧,我们就要用到图像分割,将图像中的目标从背景中分割出来,即将蚕茧与背景分割开,也将大片的蚕茧分割成一个个独立的个体,以方便后面的识别。
4.4 图像识别
本文利用康耐视自带软件In-Sight中的自带函数库,对其进行编程,对蚕茧进行识别。根据蚕茧特征的不同,所用到的检测方法也是不同的。上文说到的蚕茧,可分为2种识别方式:面积法和斑点法。为了使检测结果更加精确,我们采用In-Sight软件自带的模板匹配算法,通过对上茧进行训练,与待测蚕茧一一匹配,实现检测功能。
(1)双宫茧在体积上要比上茧大一些,面积自然也比上茧要大一些,所以我们可以用图像的零阶矩来求得蚕茧的面积。
(2)黄斑茧、穿头茧、印头茧和烂茧共同的特性就是蚕茧的表面会有污渍或者斑点,相机拍照所反映的图像是在蚕茧上有黑色阴影面积,所以我们可以根据相机是否可以检测到阴影面积来判定黄斑茧、穿头茧、印头茧和烂茧。当然,如果上茧纯度无需很高时,那些阴影面积较小、不会太影响以后工艺生产的蚕茧也是可以被通过的,我们可以通过调节斑点阈值与设定标准值来控制合格蚕茧的质量。
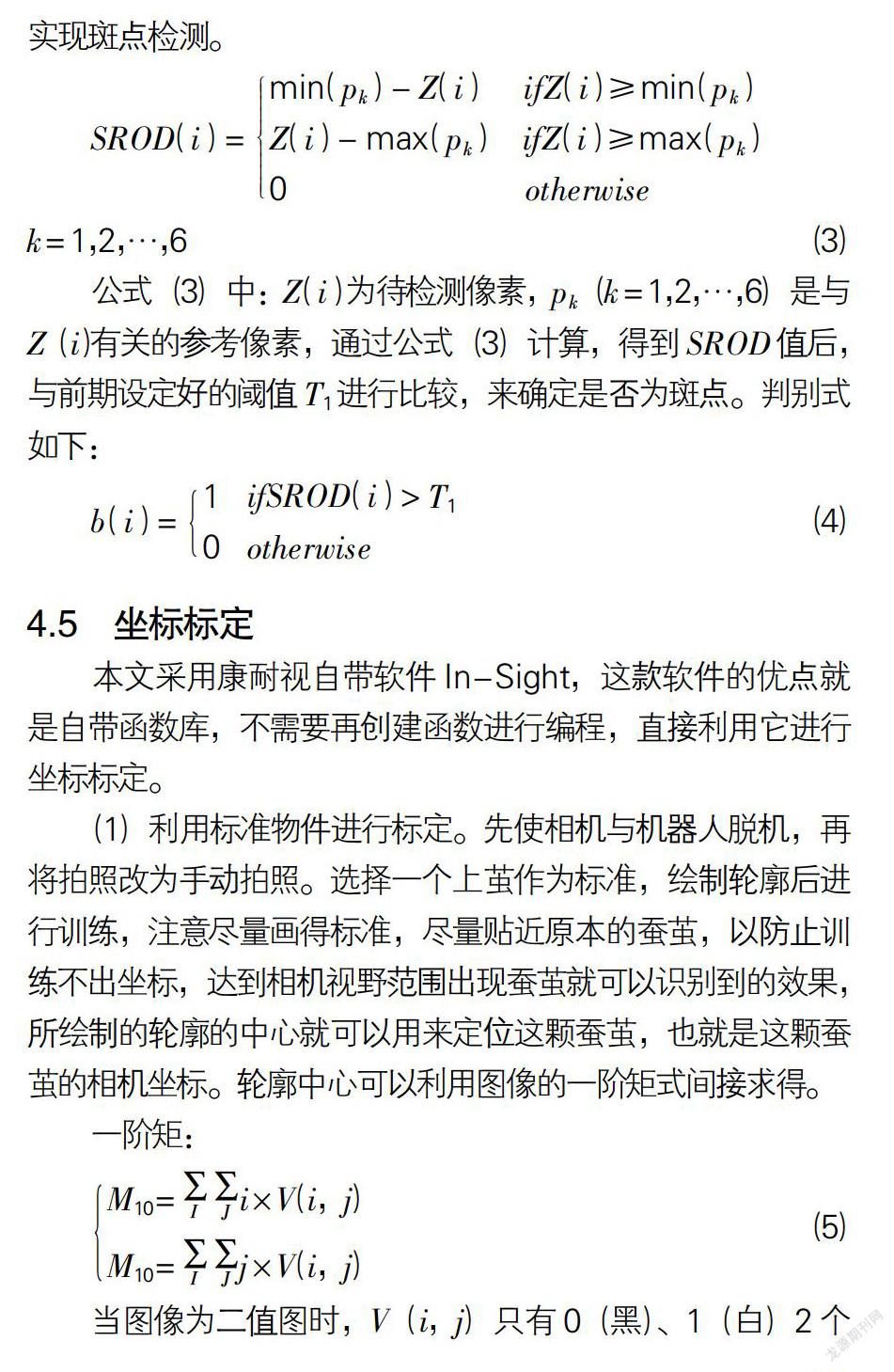
由于SROD算法在ROD算法的基礎上简化了阈值的设定及序列排序,在检测精度相似的情况下,会比ROD算法更有效率。所以,我们采用SROD算法来计算蚕茧表面的斑点,实现斑点检测。
(2)用9个标准物件来初步转化机器人坐标。经过第一步,相机可以识别出这9颗蚕茧,并给出相应的坐标,蚕茧放置如图7所示。当皮带运行一个固定距离后,这里我们设定为650 mm,用并联机器人的机械手依次触碰蚕茧的中心点,读出并联机器人的机器坐标,并将数据记录,与对应9颗蚕茧的相机坐标做对比,数据如图8所示。
根据相机坐标与传送带坐标的转化关系,如公式(9)所示,可以得到相机坐标系与传送带坐标系的转换矩阵,如公式(10)所示。
5 总结
本文主要研究了视觉系统的设计,其中包括相机及镜头的选型和光源的确定。该设计利用康耐视相机对蚕茧进行拍照,识别出坏茧进行剔除。经过大量的实验,计算出每种残茧的识别率(见表3),导致黄斑茧、印头茧、穿头茧和烂茧的识别率降低,存在着一些不可避免的因素,比如受到了光照的影响,虽然将工作环境用遮光布遮挡,不受外界自然光,但由于皮带的漫散射,导致图像上蚕茧边缘与表面斑点产生弱化,但可以通过选择反光度很低的皮带来改善这一现象。这套视觉识别装置的高识别率有效地避免了人工遴选蚕茧的不确定性,提高了蚕业生产的自动化水平,达到解放劳动力、提高效率、增加盈利的效果,也能有效地提高缫丝原料茧的品质。
参 考 文 献
[1]覃南强.基于并联机器人的自动选茧系统的设计[J].科技视觉,2016(7):163-164.
[2]刘欢.基于PLC(机器人)和机器视觉的夹片自动生产线控制系统设计[D].柳州:广西科技大学,2016.
[3]王诗宇.基于机器视觉的机器人分拣系统的设计与实现
[J].组合机床与自动化加工技术,2017(3):126-129.
[责任编辑:钟声贤]
猜你喜欢
作文·小学低年级(2021年3期)2021-11-02
现代纺织技术(2021年5期)2021-09-22
广州文艺(2020年7期)2020-07-30
现代农业科技(2020年2期)2020-03-16
农村经济与科技(2018年19期)2018-05-14
百家讲坛(2017年4期)2017-05-22
安徽农学通报(2017年9期)2017-05-19
现代农业科技(2017年5期)2017-04-19
小樱桃·童年阅读(2016年11期)2016-12-19
作文与考试·小学高年级版(2016年19期)2016-09-10