
新型迈克尔逊干涉条纹测控装置研制
2018-09-15 04:31石明吉
自动化仪表 2018年9期
石明吉,刘 斌
(南阳理工学院电子与电气工程学院,河南 南阳 473004)
0 引言
迈克尔逊干涉试验能直观地演示光的干涉现象,是理工科院校普遍开设的光学试验课之一[1]。以迈克尔逊干涉仪为核心的器件在测量激光波长[2]、超短脉冲[3]、介质折射率[4-6]、微小位移变化[1,7-8]等领域有广泛的应用。
迈克尔逊干涉仪的本质是薄膜干涉,利用分振幅法获取相干光以实现干涉[9]。通过调整该干涉仪,可以产生等倾干涉条纹。此时,固定反射镜和可动反射镜垂直,在观测屏上观察到的是一组明暗相间的同心圆条纹。干涉条纹的级次以圆心为最大。当可动反射镜移动时,相当于薄膜的厚度发生变化,观察者将看到条纹从中心向外涌出或陷入中心。每当可动反射镜移动半个波长时,就有一个条纹从中心涌出或陷入中心,中心的亮暗情况也发生一次变化。传统的迈克尔逊干涉试验中,要人工计数“涌出”或“陷入”的条纹个数,读出可动反射镜移动的距离,利用公式计算出激光波长。首先,为减小误差,通常要通过人工计数来数出上百个干涉条纹,容易引起视觉疲劳。由于试验中干涉条纹不可避免地会有一些晃动,容易导致计数出现错误。而多次测量又会加重学生负担。其次,为确定可动反射镜的位置,需要读毫米刻度尺、读数窗口和读数鼓轮上的读数。由于光学试验一般都在黑暗的环境中进行,频繁读数很不方便。测量过程对试验者要求苛刻,读数鼓轮的转动要缓慢、轻柔、一直朝一个方向转动,以防出现晃动影响计数或引入回程差。
考虑到人工计数困难,人们利用光电二极管、光敏电阻和线阵电荷耦合装置(charge coupled device,CCD)等作为传感器,设计和制作了一些可以自动计数的试验装置[10]。但是,每种设计都有自己的局限性,有的太过理想,有的误差较大。针对上述问题,研制了一种新型迈克尔逊干涉条纹测控装置。该装置以上位机为核心,通过单片机控制步进电机实现可动反射镜的运动;通过硅光电池和采集卡实现条纹中心亮度的检测。新型迈克尔逊干涉条纹测控装置克服了现有技术中人工读取干涉条纹数存在的不足。
1 迈克尔逊干涉仪原理
迈克尔逊干涉仪原理如图1所示。
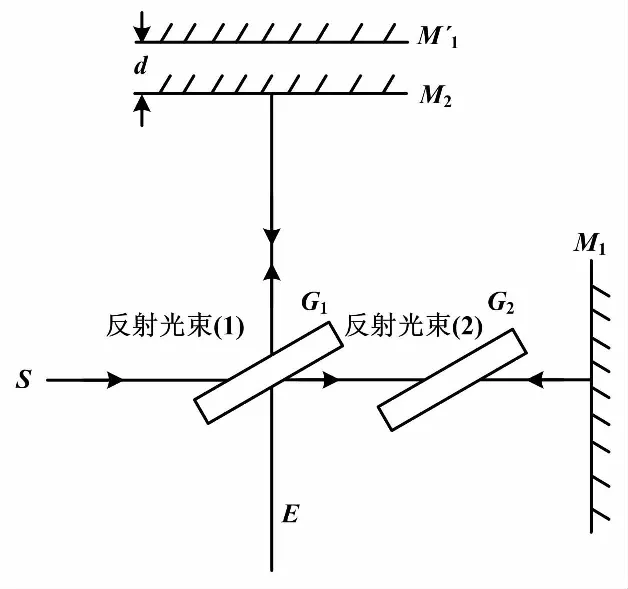
图1 迈克尔逊干涉仪原理图
G1和G2是两块平行放置的玻璃板,厚度和折射率完全相同。唯一的区别是:G1为分光板,其背面镀有一层半透半反的银膜,使照射到G1上的光一部分反射,另一部分透射;G2为补偿板,其作用是进行光程补偿。M1和M2是两块相互垂直的平面镜,M1固定不动,且与G1和G2的夹角为45°,M2在丝杆的驱动下可沿着臂轴方向前后移动。

δ=2dcosi
(1)

对第k级条纹,有:
2dcosik=kλ
(2)
当M2向G1移动时,空气薄膜的厚度d变大。对第k级条纹,根据式(2)可知,cosik必定要减小,即ik要增大。所以,条纹要向外扩展,表现为条纹从中心向外涌出,且每当薄膜厚度d增加半个波长,就出现一个条纹。反之,当M2远离G1时,等效于薄膜的厚度d变小,条纹向中心陷入,且每当薄膜厚度d减小半个波长,就陷入一个条纹。总之,当M2移动时,条纹的个数N与M2移动的距离Δd满足:
(3)
由式(3)计算入射光的波长λ[11]。
2 总体设计
新型迈克尔逊干涉条纹测控装置,由数据采集系统、可动反射镜移动系统、上位机和迈克尔逊干涉仪四部分构成,其结构框图如图2所示。
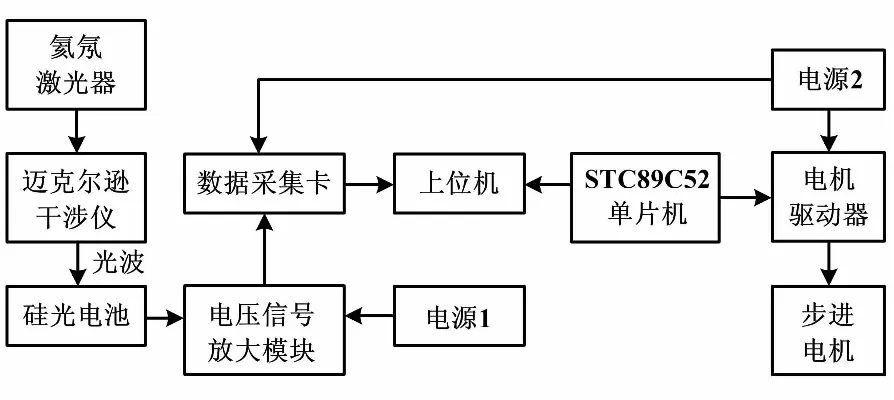
图2 测控装置结构框图
数据采集系统由硅光电池、电压信号放大模块、RS-485采集卡、RS-485转232双向转换器、串口转USB转换器,电源1(给电压信号放大模块供电)和电源2(给采集卡供电)组成。氦氖激光器发出的光,经扩束器后入射到迈克尔逊干涉仪的分光板、补偿板、固定反射镜和可动反射镜,调节后在屏上出现等倾干涉条纹。试验中,当旋转迈克尔逊干涉仪上的读数鼓轮时,观测屏上会有明暗相间的条纹不断“冒出”或“淹没”。经分析,干涉条纹圆心处的光强也是明暗交替变化的,其明暗变化一个周期,恰好对应条纹的一次吞吐。因此,可在屏上固定一个硅光电池,调节屏的高度和位置使硅光电池处在干涉条纹的圆心,并用硅光电池作为探测器,将圆心处的光强变化转换成电信号。步进电机固定在一个电机支架上,步进电机轴通过联轴器与迈克尔逊干涉仪读数鼓轮轴相连。当步进电机转动时,可动反射镜将前后移动。调整后使步进电机转动时电机支架和迈克尔逊干涉仪能保持稳定。可动反射镜移动系统由STC89C52单片机、步进电机驱动器、步进电机、迈克尔逊干涉仪(加载有可动反射镜)和电源2构成。上位机利用C语言编程,通过步进电机驱动器控制步进电机的转动,利用步进电机带动迈克尔逊干涉仪的读数鼓轮转动,从而实现可动反射镜的运动;通过RS-485采集卡获得条纹中心的亮度信息,利用软件进行绘图,给出条纹中心亮暗情况与可动反射镜位置的关系图,并保存数据和图。
3 试验结果与分析
使用新型迈克尔逊干涉条纹测装置,进行激光波长测量试验。所用光源为氦氖激光,波长为632.8 nm。读数鼓轮每转一周,可动反射镜移动0.01 mm,步进电机的步距角经细分后为0.112 5°。所以,步进电机每走一步,可动反射镜移动3.125 nm。通过计算脉冲个数,可以准确得到可动反射镜移动的距离,从而可以方便地确定激光的波长。测量过程中,步进电机的脉冲频率很低,运转时会有抖动现象。由于迈克尔逊干涉仪对震动特别敏感,稍有震动,干涉图样就会受到影响,扰乱正常的测量,使测量得到的数据点杂乱无章。所以,步进电机的转动和信号的采集要间隔一段时间。经过多次试验,发现这个时间要达到1 000 ms以上。因此,试验中设置数据采集的周期是1 500 ms。按照上述测试条件,采用新型迈克尔逊干涉条纹测控装置测得条纹中心光强与可动反射镜位置的关系。采用Origin软件对新型迈克尔逊干涉条纹测控装置保存的数据进行处理,可得到如图3所示的电压-步数图。
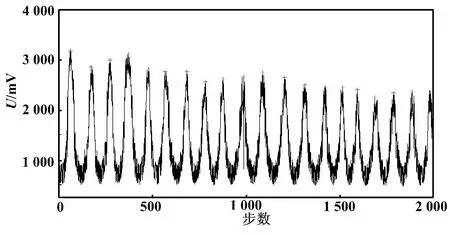
图3 电压-步数图
利用Origin软件的寻峰功能,可以快速找出亮度极值点。由于步进电机每走3 200步读数鼓轮旋转一周、可动反射镜移动的距离为0.01 mm,所以,从第1个极大值到第20个极大值,可动反射镜移动的距离为:
(4)

6.302 6×10-7m≈630.3 nm
(5)
已知所用氦氖激光器波长的理论值λ0=632.8 nm,所以,相对误差为:
(6)
利用新型迈克尔逊干涉条纹测控装置所测得的相对误差只有0.4%,表明新型迈克尔逊干涉条纹测控装置具有较高的精度。
4 结束语
本文利用上位机,通过采集卡和电压信号放大模块直接量化和采集硅光电池产生的电压信号;利用单片机、步进电机驱动器和步进电机,实现了可动反射镜的移动,效率和准确度都较高。此外,在使用硅光电池测量可动反射镜在不同位置时条纹中心亮度的过程中,可动反射镜始终朝一个方向运动,直至测量结束。通过软件,可直接给出条纹中心亮度变化与接收器位置关系图。和传统的声速测量仪相比,本文设计的新型迈克尔逊干涉条纹测控装置从根本上克服了空程误差。该装置原理简单、成本低廉、容易操作、效果直观,可取代传统的手动测量,在激光波长的测量、教学和研究方面具有重要意义。
猜你喜欢
新能源科技(2022年9期)2022-11-20
九江学院学报(自然科学版)(2022年2期)2022-07-02
环境技术(2020年1期)2020-03-06
制造技术与机床(2019年6期)2019-06-25
航天电子对抗(2019年4期)2019-06-02
中国公路(2017年19期)2018-01-23
制导与引信(2017年3期)2017-11-02
中国公路(2017年15期)2017-10-16
中国公路(2017年9期)2017-07-25
中国公路(2017年7期)2017-07-24
