一类具有Holling III反应的害虫治理的Filippov模型研究
2018-09-20 08:54胡亦郑
温州大学学报(自然科学版) 2018年3期
陆 静,罗 勇,胡亦郑
(温州大学数理与电子信息工程学院,浙江温州 325035)
目前许多学者都关注到了害虫治理问题,并且利用数学模型对害虫和控制问题做了一些研究,其中包括脉冲控制方法[1-2].但是由于化学控制滞后因素的影响,脉冲系统不能将害虫增长过程和实施控制后的过程描述出来,并且杀虫剂的使用有可能造成周围环境的污染以及其他有益昆虫的死亡,因此建立具有阈值策略的 Filippov模型[3-8]更有意义,即当害虫的密度到达经济阈值ET时才实施控制手段.文献[7]讨论了一类具有Holling II反应的害虫治理的Filippov模型,基于文献[7],本文给出并研究了一类具有Holling III反应的害虫治理Filippov模型.
1 建立模型和知识预备
1.1 建立模型
不采用任何害虫治理措施下的模型

其中x(t)和y(t)表示害虫和天敌在时刻t时的种群数量,a-bx为害虫的增长率,是天敌的Holling III型功能反应函数,d是天敌的死亡率,a,b,c,d均为正数.
当害虫数量x(t)>ET时,采取害虫治理措施模型变为:

其中 p1∈ ( 0,1), p2∈ ( 0,1)分别表示当 x (t ) > ET时喷洒杀虫剂对害虫的杀死率和天敌的投放率,并且假设 c > d ,d > p2, a > p1.
1.2 Filippov系统的相关定义与知识预备
令
那么模型(1)和(2)可记为

定义 1[7]若则称为系统(3)的滑线区域,其中〈,〉表示H(z)和 FGi的数量积(这里i=1,2).
定义 2[7]1)若 z ∈G1,且 FG1(z) = 0 或 z ∈G2,且 FG2(z) = 0 ,则称z为系统(3)的真平衡点;若则称z为系统(3)的假平衡点.
2)在∑s上局部轨线是通过Filippov系统的凸组合定义的,考虑系统

其中有 z ∈∑s, Zs(z)称为系统(3)的滑线系统.若 Zs(z) = 0 ,则z为伪平衡点.
2 模型的动力学性质
2.1 系统(1)的动力学性质
经计算系统G1的平衡点为O(0,0)和当时,系统(1)存在唯一的正平衡点
定理1 1)系统(1)的零平衡点O(0,0)是鞍点.
2) c a2> d (m b2+ a2)时,E1是鞍点; c a2< d (m b2+ a2)时,E1是局部渐近稳定的结点.
3)R1<1时,系统(1)的正平衡点E2不存在;R1>1,且成立时,E2为渐近稳定的焦点或结点.
证明:
1)计算系统(1)在O(0,0)点的Jacobian矩阵,得到它的特征多项式为(λ - a ) (λ + d ) = 0 ,其中两个特征根为 λ1= a ,λ2=- d ,即λ1λ2<0,所以O(0,0)为鞍点.
2)计算系统(1)在E1点的Jacobian矩阵,得到它的特征多项式为其中两个特征根为
若λ2>0,即 c a2> d (m b2+ a2),E1是不稳定的鞍点;若λ2<0,即 c a2< d (m b2+ a2),E1是局部渐近稳定的结点.
3)计算系统(1)在E2点的Jacobian矩阵,得到
它的特征多项式为 λ2+ pλ + q = 0 ,两特征根分别为 λ1,λ2,其中
则 λ1+ λ2= - p,λ1λ2= q .当 p > 0 ,q > 0 时,E2为渐近稳定的焦点或结点.
即R1>1.
所以当R1>1且成立时,E2为渐近稳定的焦点或结点.
2.2 系统(2)的动力学性质
经计算系统G2的平衡点为O(0,0)和时,系统(2)还存在唯一的正平衡点其中=
定理2 1)系统(2)的零平衡点O(0,0)是鞍点.
2)当 c (a - p1)2> ( d - p2)(m b2+ ( a - p1)2)时,E3是鞍点;当 c (a - p1)2<(d - p2)(mb2+(a -p )2)时,E是局部渐近稳定的结点.
3)当R2<1时,系统(2)的正平衡点E4不存在;当R2>1时,并且当

时,E4为渐近稳定的焦点或结点.
证明:
1)计算系统(2)在O(0,0)点的 Jacobian矩阵,得到它的特征多项式为 ( λ - a + p1) (λ + d - p2) = 0 ,其中两个特征根为 λ1= a - p1,λ2=- d + p2.即λ1λ2< 0 ,所以O(0,0)为鞍点.
2)计算系统(2)在E3点的Jacobian矩阵,得到
若λ2>0,即 c (a - p1)2> ( d - p2)[m b2+ ( a - p1)2],E3是鞍点;若λ2<0,即 c (a -p1)2<(d - p2)[m b2+ ( a - p1)2],E3是局部渐近稳定的结点.
3)计算系统(2)在E4点的Jacobian矩阵得到
它的特征多项式为 λ2+ pλ + q = 0 ,两特征根分别为 λ,λ ,其中
则 λ1+ λ2= - p,λ1λ2= q ,当 p > 0 ,q > 0 时,E2为渐近稳定的焦点或结点.

所以当R2>1,且时,E4为渐近稳定的焦点或结点.
2.3 Filippov系统(3)的动力学性质
为确保Filippov系统(3)正平衡点存在,需要同时满足 R1> 1 ,R2> 1 .考虑当 R1> 1 ,R2>1时,Filippov系统(3)的正平衡点的真假性,分三种情况讨论系统(3)的平衡点.
接着讨论滑线区域的存在性,由定义1可知滑线区域 ∑s= { z ∈ ∑ / σ(z) ≤ 0 },经计算,

故系统(3)的滑线区域存在,即

为保证滑线始终存在,在此假设 a - p1- b ET > 0 ,则有
最后讨论伪平衡点的存在性及稳定性.由定义1知:

令 Zs(z) = 0 ,解得y(1)=0和
要使y(2)>0,则需满足
要使y(2)∈∑s,则需满足{此时伪平衡点存在,记为 Ep(E T,y(2)).
定理3 如果满足伪平衡点存在条件,则系统(3)的伪平衡点 Ep(E T, y(2))局部渐近稳定.
证明:由于
所以,伪平衡点 Ep(E T,y(2))是局部渐近稳定的.
3 数值模拟
定理1中的3)和定理2中的3)已证明如果存在真平衡点E2和E4,则E2和E4是渐近稳定的焦点或结点,为进一步确定平衡点的类型,使用Matlab软件选取合适的参数 a = 1 ,b = 0 .23,c = 0 .5,d = 0 .4,m = 1 , p1= 0 .6, p2= 0 .1,对真伪平衡点的类型进行数值模拟,结果见图1.
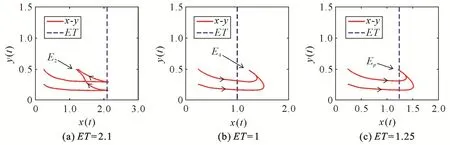
图1 Filippov系统(3)的平衡点数值模拟图Fig 1 Numerical Equilibrium Point Simulated Diagram of Filippov System (3)
通过上面的模拟,得到如下结论:
3)如果满足伪平衡点存在的条件,则系统(3)的伪平衡点是 Ep(E T,y(2)),此时取满足条件的 E T= 1 .25,则它在上是渐近稳定的结点,见图1(c).
4 结 论
本文通过对一类具有Holling III反应的害虫治理的Filippov模型的研究,求得了真假平衡点和伪平衡点,讨论了平衡点的存在性和稳定性的条件,并且推导出了将害虫控制在经济临界值以内的参数所满足的条件.因此,我们可以通过选取适当的经济阈值或者适度调整杀虫剂的用量,以此来降低害虫治理的投资成本和保护环境.
猜你喜欢
湘潭大学自然科学学报(2022年1期)2022-04-11
电子制作(2022年1期)2022-01-28
电子制作(2021年14期)2021-08-21
成都工业学院学报(2019年3期)2019-11-06
烟台果树(2019年1期)2019-01-28
传媒评论(2018年7期)2018-09-18
上海师范大学学报·自然科学版(2018年3期)2018-05-14
经济数学(2017年4期)2018-01-18
IT时代周刊(2015年7期)2015-11-11
散文百家(2014年11期)2014-08-21