
一种新型高功率因数电磁发射机
2018-11-19 07:29李佳鹏张一鸣冯馨月王海涛
通信电源技术 2018年9期
李佳鹏,张一鸣,冯馨月,王海涛
(北京工业大学 信息学部,北京100124)
0 引 言
电磁法勘探是地球物质勘探中一种常用的探测方法。电磁法勘探设备系统主要包括发射机、接收机和数据处理三部分,电磁发射机的作用是将电性源按规定的频率进行逆变,并将该信号通过两个接地电极发射出去,借此来获取有效的人工电磁场信号进行深部地球物质勘探。
作为地球物理探测装备的供电电源,电磁发射机的拓扑结构和控制方法得到了深入的研究。文献[2]提出了一种AC/DC/AC的拓扑结构,该拓扑结构采用三相不控整流器接逆变电路输出,结构简单,可靠性高,但交流侧谐波分量较大,功率因数低,同时输出电压不可调,不能满足地质探测中实际应用的要求。文献[3]采用 AC/DC/AC/DC/AC的拓扑结构。该拓扑结构具有控制简单,通用性好的优点,但这种双交直整流变换增加了系统结构复杂度,由于大型电感和变压器的加入,增大了系统的体积和重量。文献[4]提出了一种电压可调的AC/DC/AC的拓扑结构。该拓扑结构采用了励磁控制的方法,输出电压可调,系统结构简单,省略了传统发射机中的电感和变压器。但该方法在发电机运行于非线性部分时,控制实现复杂,同时系统整流部分采用不控整流技术,功率因数较低。美国ZONGE公司的GGT系列发射机[8]采用相控整流技术进行AC/DC变换,整流器输出端电压可调,但电压调节动态响应慢。
本文针对传统电磁发射机体积重量大,功率因数低的缺点,设计了一种具有AC/DC/AC拓扑结构的高功率因数电磁发射机。在该拓扑结构中,由于发电机不需要对励磁实时调节,只需提供恒定的励磁电流,因此采用永磁同步发电机即可。整流部分采用了三相电压型PWM整流器。系统的控制部分采用了基于前馈解耦的双闭环控制方法,该方法不仅可以实现整流器输出直流电压可调,还可以实现发电机单位功率因数运行。在前馈解耦双闭环的控制系统中,转子位置角是解耦控制的必要条件,通常采用光电编码器、旋转变压器等位置传感器进行转子位置与速度估计,可以准确、方便地获得转子位置信息,但在复杂环境下,位置传感器不仅增大了系统的体积,同时也存在安装困难、对环境要求苛刻、响应速度慢、抗电磁干扰能力弱等问题[9]。本文采用了基于滑模观测器的无位置传感器方法,利用包含转子位置信息的电机反电动势信号估算出转子的位置,并提出了一种基于锁相环的转子位置提取方法。这降低了硬件电路的复杂程度,提高了系统的可靠性和抗干扰能力,同时减小了系统的体积和重量[10]。国内外很多学者对无位置传感器都做了研究,但大多用于电机控制系统中,很少应用于发电机PWM整流系统。
1 发射机拓扑结构原理
电磁发射机系统的电路结构如图1所示。该系统主要包括以下几个部分:发电机组、PWM整流电路、逆变脉冲形成电路、发射电极。

图1 发射机电路结构图
发电机组为整个电磁探测发射系统提供初始电能,本文发电机组采用永磁同步发电机。与传统三相电压型PWM整流器[12]类似,发电机定子绕组与后面的三相六开关共同组成PWM整流部分,只是省去了外部的滤波电感,而直接采用发电机的定子电枢电感作为滤波电感。应用于陆地的电磁探测发射机需要提供大功率大电压输出,所以本文采用的是boost型PWM整流器。逆变脉冲形成电路将可控直流电逆变成频率可调的方波交流电,通过发射电极将电能输送到大地。
2 系统模型控制策略
发电机PWM整流电路如图2所示。
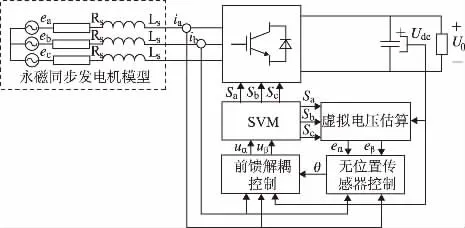
图2 三相PWM整流电路结构图
图2 给出了发电机的等效模型,其中ea,eb,ec为转子磁场产生的等效反电动势,Rs为等效电枢绕组电阻,Ls为等效定子绕组电感。本文所用永磁同步电机为表面贴式电机,属于隐极式同步电机,交、直轴电感相等,因此有Ls=Ld=Lq=L。永磁发电机PWM整流器在dq旋转坐标系下的数学模型如式(1):
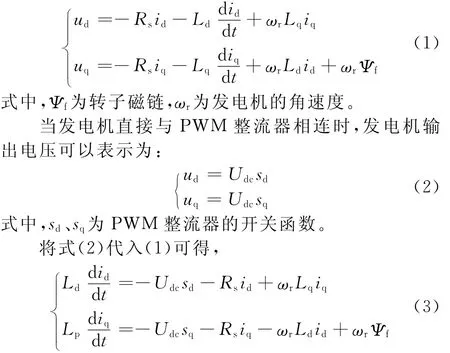
从式(3)可以看出,由于发电机PWM整流器d、q变量相互耦合,因而给控制器设计造成了一定的困难。为了解决上述问题,可以采用前馈解耦控制策略,当电流调节器采用PI调节器时,得到状态反馈方程如下:
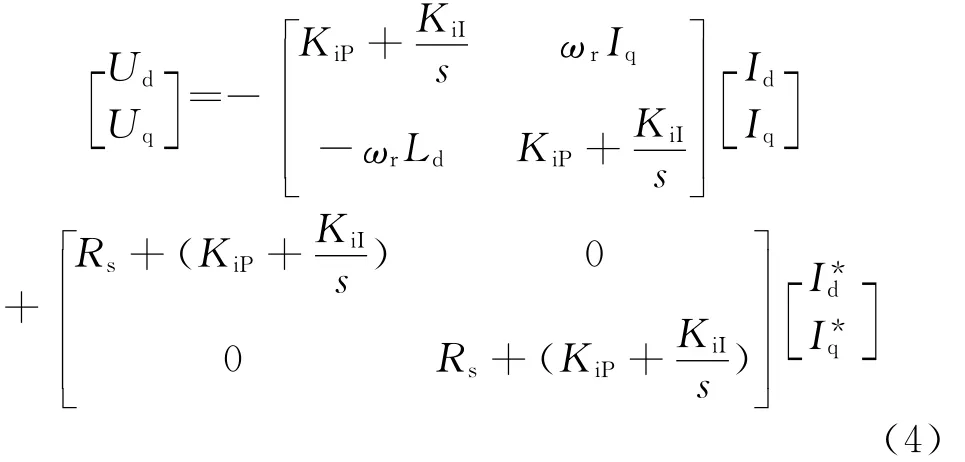
将式(4)展开且忽略发电机内阻Rs可得ud、uq的控制方程如下。
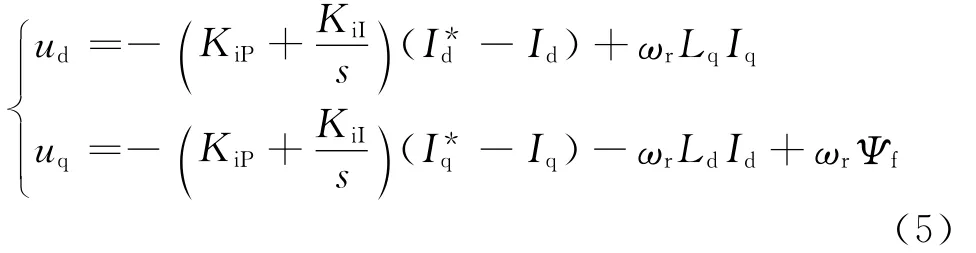
基于前馈解耦的控制算法使整流器电流内环(id,iq)实现了解耦控制,如图3所示。
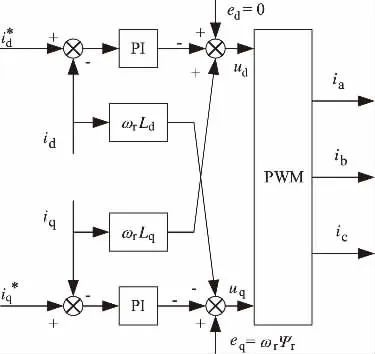
图3 电流内环解耦控制结构
由于d轴和q轴对称,因此电流环的PI控制器设计以d轴为例进行分析。考虑电流内环信号的采样延迟和PWM控制的小信号特性,已解耦的id电流内环结构如图4所示。
图4中,KiP,KiI为电流内环控制器比例、积分系数,Kpwm为PWM等效增益,Tif为采样和给定延时。

图4 id电流环结构
在永磁同步发电机PWM整流器中,忽略三相PWM整流桥自身损耗,则整流桥交流侧有功功率pac和直流侧功率pdc平衡,即

根据式(6)、(7)可得,电压外环控制结构如图5所示。
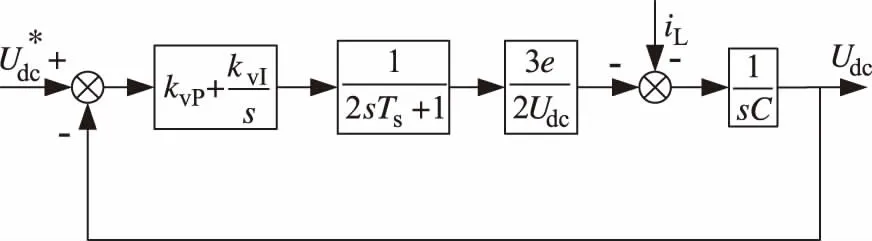
图5 电压环控制框图
3 无位置传感器控制
3.1 滑模观测器法
一般而言,滑模观测器的设计分为以下两步,首先选择滑模切换面,其次设计控制输入,使系统轨迹向滑模切换面运动,确保系统满足滑模可达性条件。
永磁同步发电机在两相 - 静止参考坐标系下的电压方程如下:
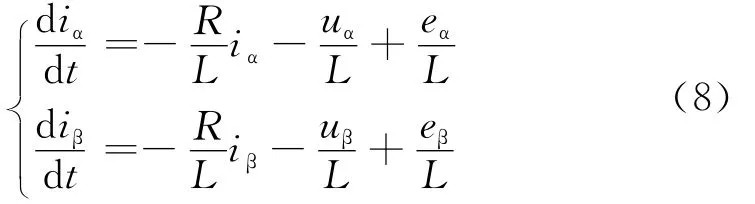
由式(8)所描述的反电动势方程可知,在两相静止坐标系下电机反电动势中包含了电机转子位置与电角度信息。因此,为了获取电机转子位置和转速信息,根据滑模变结构控制理论,定义切换函数如下:
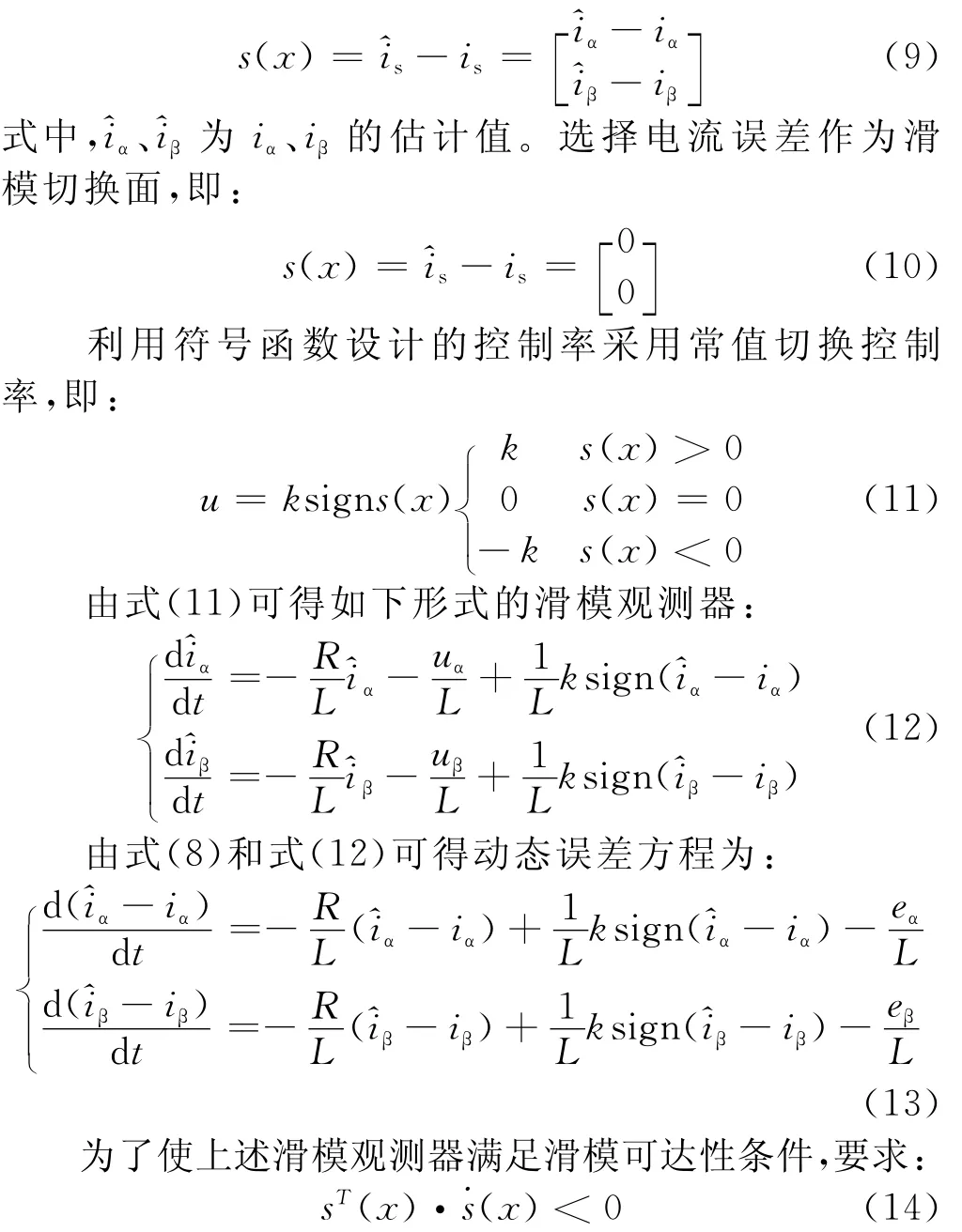

由于估算电流值和实际电流值产生的误差信号中包含大量高频开关信息,需要用低通滤波器从开关信息中提取连续的等效信号,即为反电动势估算值。
由两相静止参考坐标系下反电动势方程式(8)及反电动势信息估计值式 (19)可知,对反电动势估计值经过式(20)的数学处理后便可提取出转子位置与速度信息。

由于式(18)所估计反电动势过程中需要进行低通滤波,导致得到的反电动势估计值有一定的相位延迟,进而影响转子位置与速度的准确估计,在实际应用中需要进行相应的相位补偿,补偿公式为:

最终可得经过相位补偿的转子位置为:

3.2 位置跟踪算法
对反电动势进行反正切运算得到转子位置的方法在数值实现时精度不高,噪声干扰明显。为了提高转子位置的观测精度,本节采用了转子位置跟踪算法从观测得到的反电动势中提取转子位置信息。图6为转子位置与速度跟踪算法结构框图。
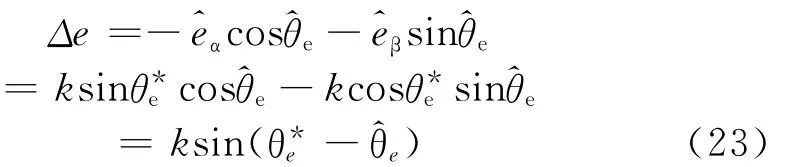
式(23)中,k代表反电动势系数;θe*为反电动势相位角。若转子位置观测误差满足,则可将式(23)化简为:
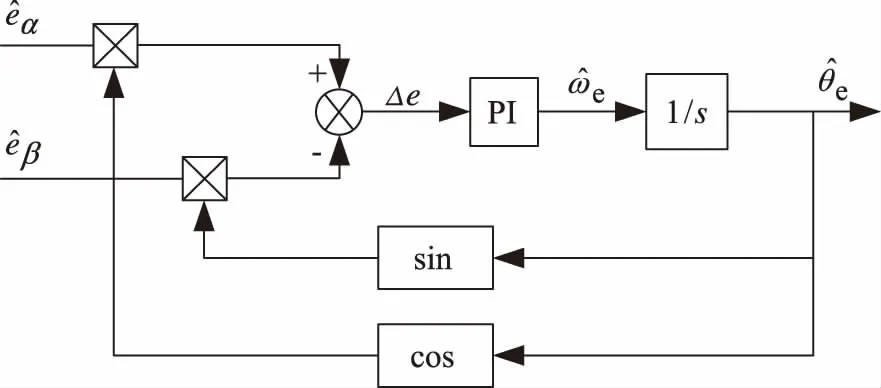
图6 转子位置与速度跟踪算法

由式(24)可见,转子位置跟踪算法相当于图7所示的锁相环(PLL)结构。电机转子实际位置与估算位置信息相减后获得转子速度估计值,对转子速度估计值进行积分运算便可估算出转子位置信息。
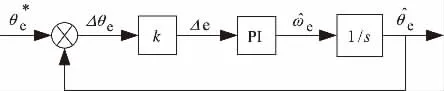
图7 锁相环原理图
3.3 电压重构技术
无位置传感器控制需要发电机输出电压量,若采用传统传感器测量方式无疑增加了硬件的成本,且直接检测量为PWM脉冲信号,需要设计滤波器,从而不可避免的产生相位延迟。本文采用电压重构技术,它依据直流母线电压Udc和逆变器功率开关管的状态(Sa,Sb,Sc)而计算出各相输出电压。发电机输出端相电压可以用式(25)表示:

4 仿真分析
为了验证设计方案的可行性,使用Matlab/Simulink软件对发射机性能进行了仿真研究,所采用的工具箱是SimPowerSystem,仿真的采样时间为50s。发电机仿真参数如表1所示,整流器仿真参数如表2所示。
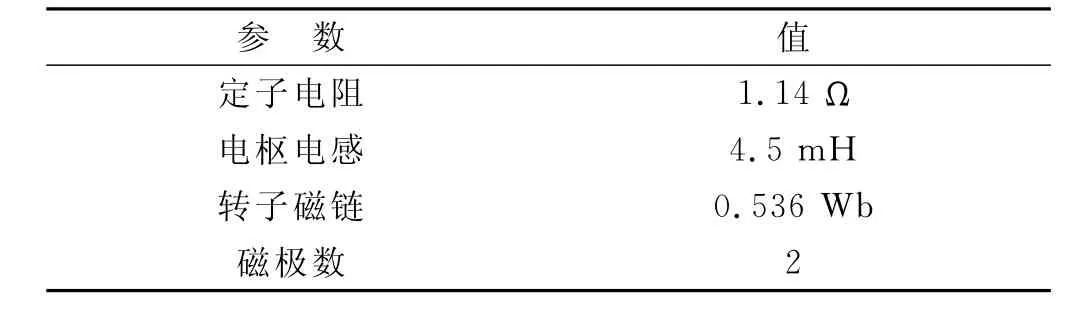
表1 发电机参数
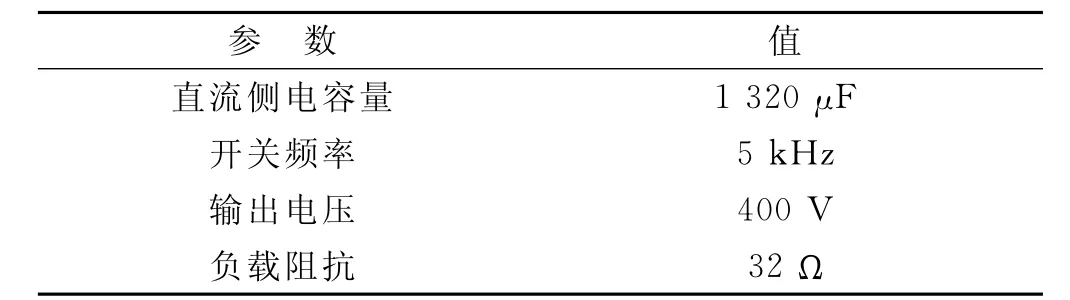
表2 整流器参数
图8给出了发射机工作在200 Hz时,PWM整流器的输入输出端波形。仿真结果表明,发电机输出端相电压接近正弦波,电流的THD为1.92%,如图8(a)和(b)所示。图8(d)为采用PLL得到的发电机转子位置,相比反正切法,得到的角度更加平滑,且在转角为90°时,没有太大偏差。由图8(a)和图8(d)可知,发电机相电流与发电机反电动势同相位。因此,发射机的瞬时无功功率(如图8(c))Q为0,发射机处于单位功率因数运行。

图8 发射频率为200 Hz时,整流器输入端和输出端波形
5 实验验证
为了验证本文提出方案的可行性,搭建了一个实验平台,主要包括以下几个部分:一台改造的定励磁发电机组(与永磁发电机等效),PWM整流器(3个型号为FF150R12RT4的IGBT),发射电路(2个型号为FF150R12RT4的IGBT),负载。系统的控制算法及PWM生成由DSP28335实现,发射电路控制信号由FPGA实现。系统的实验参数与仿真参数完全一致。
图9、图10分别给出了新型发射机输出低频(32 Hz)和高频(4 096 Hz)方波时的波形,输出波形平滑稳定,满足地球物理探测的要求。由于发射机在输出不同频率时,PWM整流器的输入端和输出端的波形相同,因此以32 Hz发射频率为例,给出PWM整流器的输入输出端的波形。
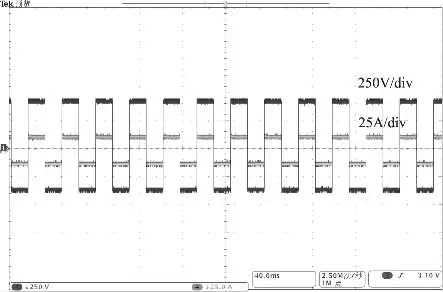
图9 发射频率为32 Hz时,新型发射机输出电压电流

图10 发射频率为4 096 Hz时,新型发射机输出电压电流
由图11(a)可以发现,新型发射机输入电流近似为标准的正弦波,波形畸变小,PWM整流器输出直流电压稳定在400 V左右。
图11(b)为发电机转子位置和发射机输入电流波形,对比两者波形可以发现,电流和转子位置保持一致。
图12给出了发射机的有功电流和无功电流波形,此波形是DAC8562输出得到。经过计算可以得到有功电流iq稳定在25 A左右,无功电流稳定在0左右。
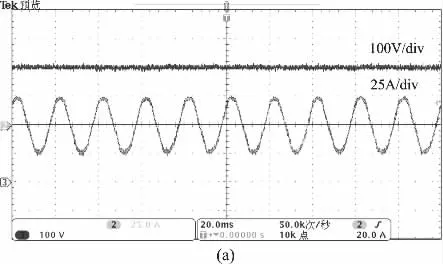
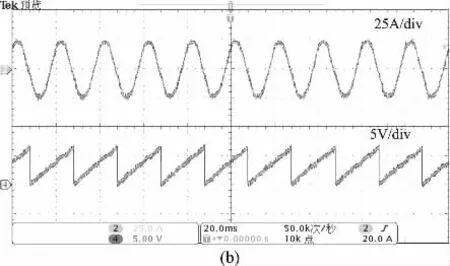
图11 新型发射机PWM整流器输入输出波形
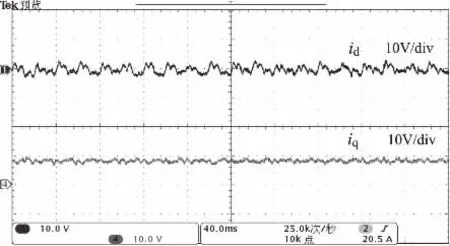
图12 新型发射机有功电流无功电流
6 结 论
本文基于PWM整流技术设计了一种可以满足地球物理探测需求的新型高功率因数电磁发射机,给出了发射机的拓扑结构,建立了发电机PWM整流器的数学模型,提出了基于前馈解耦的双闭环控制策略,采用基于滑模观测器的无位置传感器法对发电机转子位置进行观测,克服了位置传感器的缺陷,并通过PLL方法提取得到转子的位置角。最后,对设计方案进行了仿真和实验研究。仿真和实验结果表明,采用本文提出的方法,发射机可以实现高功率因数运行。
猜你喜欢
微电机(2022年8期)2022-10-12
科学家(2021年24期)2021-04-25
郑州大学学报(工学版)(2020年2期)2020-06-16
自动化学报(2019年12期)2020-01-19
汽车电器(2019年2期)2019-03-22
西部论丛(2018年12期)2018-11-28
电子制作(2018年16期)2018-09-26
科教导刊·电子版(2017年16期)2017-07-21
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
