
弹簧振子简谐振动理论分析和数值模拟
2018-12-17 09:13陈欢
中国设备工程 2018年22期
陈欢
(浙江 杭州 310000)
对简谐运动的研究可以帮助我们更深入了解能量的变化形式。复杂的运动都能简化成简谐运动的线性叠加,例如人类声带所发出的声音,有音色、响度、音调的不同,但可以看作是20~2000Hz的各个频点所做简谐运动的线性叠加。而现代的无线电通讯、无限保真技术,则是将电磁波通过复杂的网络解析为多个简谐运动后接收其中包含的信息。简谐运动是信号处理传输的基本分析对象。综上所述,简谐运动在物理学、电子信息以及音乐等等方面都会涉及,用处广泛。简谐运动在大学课程中才会有系统、详尽的讲解。
本文通过理论分析和数值模拟相结合的方法对弹簧振子简谐振动运动方程及特点进行研究,用到的数学计算工具为matlab。matlab是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,它具有以下4个方面的突出优势:(1)高效的数值计算及符号计算功能,能使用户从繁杂的数学运算分析中解脱出来;(2)具有完备的图形处理功能,实现计算结果和编程的可视化;(3) 友好的用户界面及接近数学表达式的自然化语言,使学者易于学习和掌握;(4)功能丰富的应用工具箱(如信号处理工具箱、通信工具箱等),为用户提供了大量方便实用的处理工具。
1 不带阻尼的简谐运动
不带阻尼的简谐运动是一种理想的物理模型,它忽略了结构在做机械运动时的阻尼效应,本文以小球-弹簧振子为例,对简谐振动进行分析模拟。图1为弹簧振子的物理模型图,该模型由小球、弹簧、固定板3部分组成。小球质量为m,弹簧劲度系数为k,弹簧左端固定于固定板上,右端连接小球,弹簧中轴线与水平方向平行。小球与固定平板之间不存在摩擦,且系统没有阻尼。假设弹簧自然伸长状态下小球与固定板接触点如图中O点,以O点为坐标系原点,水平向右的方向为正方向,建立坐标系。
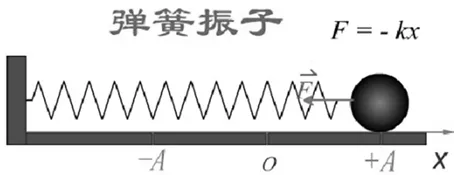
图1 弹簧振子物理模型
1.1 运动方程的建立
对小球进行受力分析:小球于竖直方向上受到两个力的作用:竖直向下方向上的重力G和竖直向上方向上固定板对小球的 Fp,且G=Fp,因此小球竖直方向上受合力为零。在水平方向上随着小球来回运动,会受到弹簧的回复力F,它的方向为从小球指向原点O。取小球任意某时刻的运动状态进行分析,设小球在x轴上坐标为x,则得小球水平受回复力F表达式为:
F=-kx (1)
其中负号表示小球受力方向与小球的运动方向相反。根据牛顿第二定律得:
F=ma (2)
其中a为小球在水平方向上的加速度大小,方向由小球指向原点。由(1)(2)两式可得:
kx+am=0 (3)
设小球位移为s,速度为v,已知位移对时间的求导等于速度,速度对时间的求导等于加速度,因此加速度是位移的二阶导数,用公式表示为:

将公式(3)和(4)联立可得:

解的形式为公式(6),其中为公式(7)所示。


1.2 方程解的关键参量
小球的简谐运动中主要的核心参量有振幅 A、角频率 ω、相位 φ。其中振幅 A表示是弹簧振子在振动过程中最大位移的绝对值,国际单位为m。弹簧振子的振幅A弹簧振子系统所具有机械能相关,在振动过程中小球位移的变化体现了系统动能与弹簧势能之间的转换。在相同条件下,当系统所具有的机械能总和越大时,弹簧振子的振幅A越大。角频率ω表示的物理含义是弹簧振子在振动过程中位移在参考圆上的相位变化速度,即单位时间内小球振动相位发生的变化量,用公式表示为(8),单位为rad/s。其中T代表振动周期,它表示的物理含义是弹簧振子完成一次全振动所需的时间,国际单位为s,f为振动频率,它表示的是弹簧振子每秒完成的全振动的次数,国际单位为Hz。由公式(7)可知,周期T、频率f、角频率ω仅与弹簧振子系统本身的物理性质有关,如弹簧的材质、振子的质量、弹簧的匝数等,与弹簧振子小球的速度、初始位移等无关,是弹簧振子系统的固有属性。相位φ是界定弹簧振子在t时刻的运动状态的物理量,用公式表示为(9),其中φ0表示小球的初始相位,弹簧振子在开始观测和计时时所处于的位移x0 决定了弹簧振子的初相φ0。

运动状态由位移x、速度v和加速度a3个关键矢量来描述。当小球经过零点(O点)时,小球的位移绝对值等于零,速度绝对值最大,加速度绝对值等于零。当小球达到最大位移处(A点)时,它的位移绝对值最大,速度为零,加速度绝对值最大,且方向与位移方向相反。
2 带阻尼的简谐运动
2.1 运动方程的建立
当考虑系统的阻尼效应时,假设系统服从粘性阻尼模型,则小球在运动的过程中,不但受到弹簧对小球的回复力,而且还会受到阻尼力f的作用,阻尼力的作用是阻碍小球的运动,其中f的表达式如下:

v表示振子的运动速度(矢量),是表征阻尼大小的常数,称为阻尼系数,国际单位制单位为N·s/m。因此运动方程改写为:

此时令固有圆频率,令,则阻尼振动的微分方程为:

2.2 运动方程求解
在求解简谐运动的过程中,我们主要使用MATLAB软件中的dsolve函数来对建立的小球的运动微分方程进行求解。dsolve函数在MATLAB中有以下几种形式,根据输入参数的个数不同,dsolve函数会输出不同的返回值:
s=dsolve(eqn)
s=dsolve(eqn,cond)
s=dsolve(eqn,cond,Name,Value)y=dsolve(eqns)
y=dsolve(eqns,conds)
y=dsolve(eqns,conds,Name,Value)
[y1,…,yN]=dsolve(eqns)
[y1,…,yN]=dsolve(eqns,conds,Name,Value)
其中,eqn表示差分方程表达式,cond表示约束变量的条件,Name即变量名,value即变量的值。当我们求解小球带阻尼的简谐振动方程(12)时,假定小球的质量m=2kg,弹簧劲度系数k=2N/m,小球经过原点时开始计时,即x(0)=0,且此时小球的速度v(0)=1m/s,此时利用dsolve函数如下所示:
x=dsolve(‘D2x+2×0.1×Dx+(2/2)×x=0’,’x(0)=0’,’Dx(0)=1’,’t’)
其中,’D2x+2×0.1×Dx+(2/2)×x=0’为微分方程表达式,’x(0)=0’,’Dx(0)=1’为约束条件,’t’为变量名,求解该函数,得到位移x的表达式如下所示:
x=(10×11^(1/2)×exp(-t/10).×sin((3×11^(1/2)×t)/10))/33
由此可知,此时方程的解为一个准正弦振动曲线,振动幅值呈指数函数形式衰减。下面将利用作图法对方程的解进行讨论。在绘制小球位移-时间曲线时,定义时间t为一维数组,将得到的位移表达式通过plot(t,x)的方式进行绘制。
2.3 阻尼系数对小球运动状态的影响
当小球的质量、弹簧劲度系数及小球初始运动状态固定不变时,考虑阻尼系数对小球运动状态的影响,也即考虑对系统的影响。令在0.1~1之间等间距的改变,计算对应的小球运动方程,得到一系列小球位移曲线,利用plot函数将这些曲线绘制在一起进行对比研究,见图2。
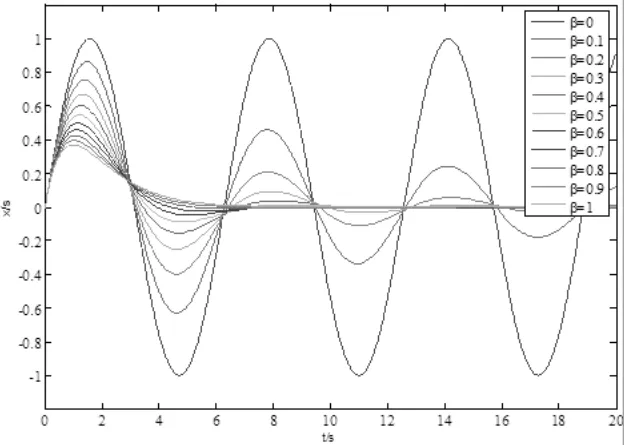
图2 不同阻尼系数对应小球的位移曲线
综上所述,当时,位移曲线为标准的正弦振动曲线,对应系统不带阻尼时的解。随着增加,位移曲线虽然仍近似“周期”振动,但振幅呈指数型函数衰减,且越大衰减越快,此时称为“欠阻尼”运动。当超过某一值时,小球机械能不等接近平衡点能量已经很小,不能产生准周期运动,此时称为“过阻尼”运动。由“欠阻尼”到“过阻尼”的临界点称为“临界阻尼”,此时小球初次回到平衡位置时机械能刚好为零。
3 结语
简谐运动作为一种在物理学、电子信息以及音乐等等方面都会涉及的物理模型,其重要性及研究价值决定了我们对其深入了解的必要性。本文详细叙述了弹簧振子做非阻尼及阻尼简谐振动的方程的建立过程及关键参量的物理含义,再结合求导等数学手段列出微分方程表达式,而后利用MATLAB软件中的dsolve函数对其函数进行求解,并绘制位移-时间图像,以研究其简谐振动的运动特点,并研究了阻尼对简谐振动的影响,以此来研究简谐运动、波在物理模型中的各类特性。
猜你喜欢
现代信息科技(2022年8期)2022-08-12
初中生世界(2020年47期)2021-01-07
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
安顺学院学报(2020年1期)2020-04-05
物理学报(2019年12期)2019-06-29
现代计算机(2019年6期)2019-04-08
学校教育研究(2018年4期)2018-10-21
