三维激光扫描技术在矿山边坡变形监测中的应用
2019-01-03 02:03张灯军
西部资源 2019年4期
关键词:工作流程
张灯军

摘要:三维激光扫描技术作为一种新技术,它被称之为由“单点测量”到“面测量”进化的革命性技术突破。本文中,笔者归纳了“三维激光扫描技术”的工作流程,基于此,探讨了“三维激光扫描技术”获取DEM模型的方法,着重讨论了外业数据采集和数据处理过程中的关键技术,如点云数据匹配、数据绝对定位及拼接等。试验结果初步说明了,该技术较为适合大变形边坡监测,能够为边坡灾害提供真实、客观、有效的预警信息。
关键词:三维激光扫描技术;工作流程;DEM模型
三维激光扫描技术能够提供扫描物体表面的三维点云数据,而相比较而言,传统的“地表建模工具”的作业效率低下,且已经有了逐步被三维激光扫描技术替代的趋势。新时期,三维激光扫描技术是一项已经逐渐成熟的新技术,它应用于矿山边坡变形监测中,既能够实现矿山边坡坡体的快速数字化,还能够获取矿山边坡坡体表面的三维影像,从而切实实现“见=测”[1]。下文中,笔者归纳了“三维激光扫描技术”的工作流程,并探讨了“三维激光扫描技术”获取DEM模型的方法,着重讨论了外业数据采集和数据处理过程中的关键技术,如点云数据匹配、数据绝对定位及拼接等,具体如下:
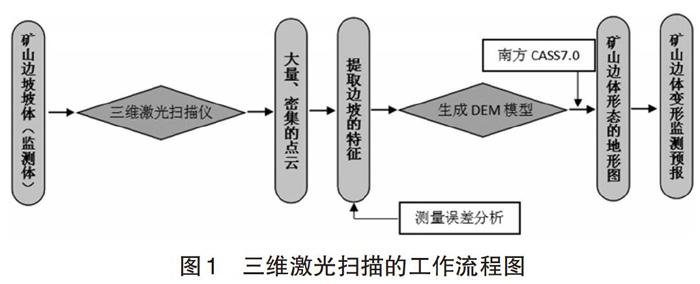
1.三维激光扫描的工作流程
目前,三维激光扫描技术已经引起了研究领域的关注,而三维激光扫描仪的工作原理就是激光测距,通过记录被测物体表面“点”的三维坐标、反射率以及纹理等信息,进而快速生成被测物体的三维模型及点、线、面等各种图间数据。这里需要注意的就是,该技术测量的“点”呈现大量、密集的特征。运用三维激光扫描技术监测矿山边坡的变形,能够获取大量的点云数据,并且每个点的位置信息都可以通过极坐标(α,ξ,d)清晰地展现于扫描坐标中。扫描前,要结合矿山边坡坡体的具体情况,设置恰当的“扫描控制点”,并通过GPS( Global Positioning System)获取每一个“扫描控制点”的大地坐标,为将“点云坐标”转化为“大地坐标”奠定基础,同时也能够为分析矿山边坡变形提供一份客观、标准的数据。结合三维激光扫描技术获取的数据,提取矿山边坡坡体的特征,进而生成精确度较高的DEM模型。
2.三维激光扫描技术在矿山边坡变形监测中应用的方法与流程
2.1外业数据采集
结合矿山边坡具体的地理位置,利用CYRA2500三维扫描仪对监测体进行大面积的扫描,而CYRA2500三维扫描仪工作时,要按部就班地逐站进行数据扫描,并且在此次三维激光扫描数据获取的过程中,采用“分站一分景”的扫描过程,即分别在矿山边坡坡体的上、中、下三个位置建立分站,并且每个分站都要通过“圆形区域”完成扫描。这里需要注意的就是,扫描仪器采集到的信息,并不能够直接运用,而是要对信息进行预处理,剔除误差信息,确保信息的客观性与可操性,为建立精确度高的DME模型提供数据支持。
2.2数据处理
采集数据工作完成后,紧随而来的就是数据处理工作,结合多年一线的实践经验,精确处理数据并非一项简单的工作,而是要通过多个技术环节共同协作完成,主要有点云数据匹配、各景扫描数据以及坡体DEM生成,具体如下:
(1)点云数据匹配。点云数据匹配的终极目标就是完成“点云坐标”到“大地坐标”的转化,而实际运用中,往往会采用“标志点匹配法”实现,具体步骤为:首先,按照空间坐标与距离值,处理矿山边坡坡体的第一幅点云标志点的集合,同时还要动态进行分层划分,进而形成层嵌套;其次,将矿山边坡坡体的第一幅点云作为基准,并将第一幅点云标志点与第二幅点云标志点进行匹配,这里需要注意的就是:匹配点云标志点时,要结合运动规律预设出数据采集的区域,同时要选用“区域数据匹配法”,将已然处理好的数据引入到相对应的数据层,进行更深入的预测估计,并要结合实况不断地修改、更正数据层,进而实现最优化状态。
(2)各景扫描数据绝对定位及拼接。点云坐标就是以各分站位置原点的三维坐标系坐标,而要想建立精确度高的坡体DEM模型,就要将各景的“点云坐标”统一呈现于同一坐标下。多视点云拼接就是贯彻实测位置的原则,将不同坐标系中的“分景”点云数据,统一在同一个坐标系中描述出来,得到较为完整、写实的三维物体。目前,在数据处理过程中,一般会运用标定物拼接和ICP(It-erative Closest Point迭代最近点)算法这两种方法,实现点云拼接[2]。
标定物拼接:最大的优点就是速度比较快,仅仅需要解一组线性方程组就可以,而最大的缺点就是准确率较低,因为标定物往往都有一定的体积,进而导致标定物点、线、面等的反射率的一致性难以保障。
ICP算法:是一種点集对点集配准方法。该方法的精确性非常高,操作便易,且扫描不再需要借助反射体,但是迭代过程会耗费大量的时间,特别是初值选择不当的情况下,收敛的速度就会更为缓慢,甚至会出现“发散”的现象。
试验时,可以选用CPS和全站仪对坡体进行联合监测而扫描。
(3)矿山边坡坡体DEM的生成。为了生成矿山边坡坡体的DEM模型,可以选用CYCLONE软件,利用其具备的数据导出功能,完成扫描格式IMP向用户需求格式IMP的转化。无论任何时段的DEM都要通过坐标进行统一描述,呈现于同一个坐标系统中,目的就是采用求差方法,对矿山边坡变形进行客观的分析。当比较同水平坐标点的高程变化时,就要将初始化的DEM数据作为参考,并将后面的DEM进行内插计算,进而获取坡体变化的大小。
3.结论与讨论
将某矿山边坡作为研究对象,为了监测该矿山边坡变形的情况,明确三维激光扫描技术较于常规测量方法优越,笔者分别采用了三维激光扫描技术与常规测量方法进行了监测,并对两种方法测量的数据结果进行了对比,见表1。
结合表1发现,三维激光扫描技术能够获取大量的点云数据,是传统测量法所获得“点”的数十倍,精确获取了坡体表面变化的情况,更生成了直观、形象的三维影像,同时它降低了投入的人力与费用,更提高了监测的安全性,避免测量人员深入矿区。而由甲、乙、丙、丁四个区域变化量的测量结果得知,三维激光扫描技术测量的数据更客观与可靠。除此之外,三维激光扫描技术能够为边坡灾害提供真实、客观、有效的预警信息。
参考文献:
[1]王黎明,刘夫晓,王新生.三维激光扫描技术在矿山巷道变形监测中的应用U].矿山测量,2013(03):79-80+95.
[2]王伟忠,朱煜峰,王建强.三维激光扫描数据拼接质量改善方法研究——以新疆呼图壁煤矿为例卟现代矿业,2012(08):49-50.
猜你喜欢
河南图书馆学刊(2016年12期)2017-01-09
商场现代化(2016年25期)2016-11-15
财会学习(2016年19期)2016-11-10
科技传播(2016年13期)2016-08-04
广东教育·职教版(2016年4期)2016-05-11
科教导刊(2015年14期)2015-06-09