基于LSTM的内河船闸主动防撞系统研究
2019-01-06 03:41夏春荣
中国水运 2019年12期
关键词:系统
夏春荣


摘 要:本文提出了一种基于长短期记忆(LSTM)神经网络的内河船闸主动防撞系统。面向复杂条件下船闸主动防撞技术这一关键问题,围绕多普勒雷达、毫米波雷达及船用阻拦系统的零部件及产品产业化要求,分别从系统硬件、软件与算法、装置设计与性能优化等方面着手,开发研制了内河船闸主动防撞系统。
关键词:内河船闸;主动防撞;LSTM;系统
中图分类号:TM71 文献标识码:A 文章编号:1006—7973(2019)12-0056-04
作为内河航道重要的通航设施—船闸,在航道条件改善、防洪抗旱等方面发挥了重要作用,其运行效率直接制约着内河航运的发展。近年来, 随着交通运输事业的飞速发展,船舶过闸需求增加, 内河船舶与船闸间的碰撞事故发生频率不断增多,极易引发断航、堵航、甚至土方坍塌等次生事故。如果是危险货物的运输船舶发生碰撞船闸事故,不仅是简单的维修和经济赔偿问题,还会带来难以预料的生态灾难和社会危害。碰撞导致的船闸断航、大量船舶滞航常带来生态环境污染和社会不稳定,给航运企业带来巨大的经济损失。政府、交通部门不得不协调、应对、处置由此带来的负面影响。因此,内河船闸主动探测技术与防碰撞装置的研究工作尤为迫切和必需。内河船闸过境船舶的自动识别及其主动防撞技术,国内外许多科技工作者进行过该领域的研究,在中国,船闸防撞研究正处于初级阶段,取得了一定的研究进展,但仍然没有解决内河船闸交通运输中的根本难题。
长短期记忆神经网络(Long Short-Term Memory,LSTM)是一种改进的深度学习算法,系改进循环神经网络(Recurrent Neural Network,RNN)的计算单元而得来。其对于处理时间序列相关的数据有良好的效果。本文提出采用船舶自动识别系统与雷达融合信息的船闸主动防撞系统,可以有效的解决单一设备目标识别不准确与目标信息不丰富的问题,提高了进出船舶识别的准确性,可以对过闸船舶实施有效的跟踪,实现船舶过闸安全可靠,确保船员、运输船、船闸等的安全。
1 LSTM网络的原理介绍
RNN是一类用于处理序列数据的神经网络。该网络的内部状态,能够展示动态时序的行为,和BP神经网络不同。RNN处理任意时序的输入序列可以利用其内部的记忆,常常被利用来处理连续序列数据问题,因此适用于本课题的内河船舶信息采集。RNN的神经网络模型结构如图1所示。
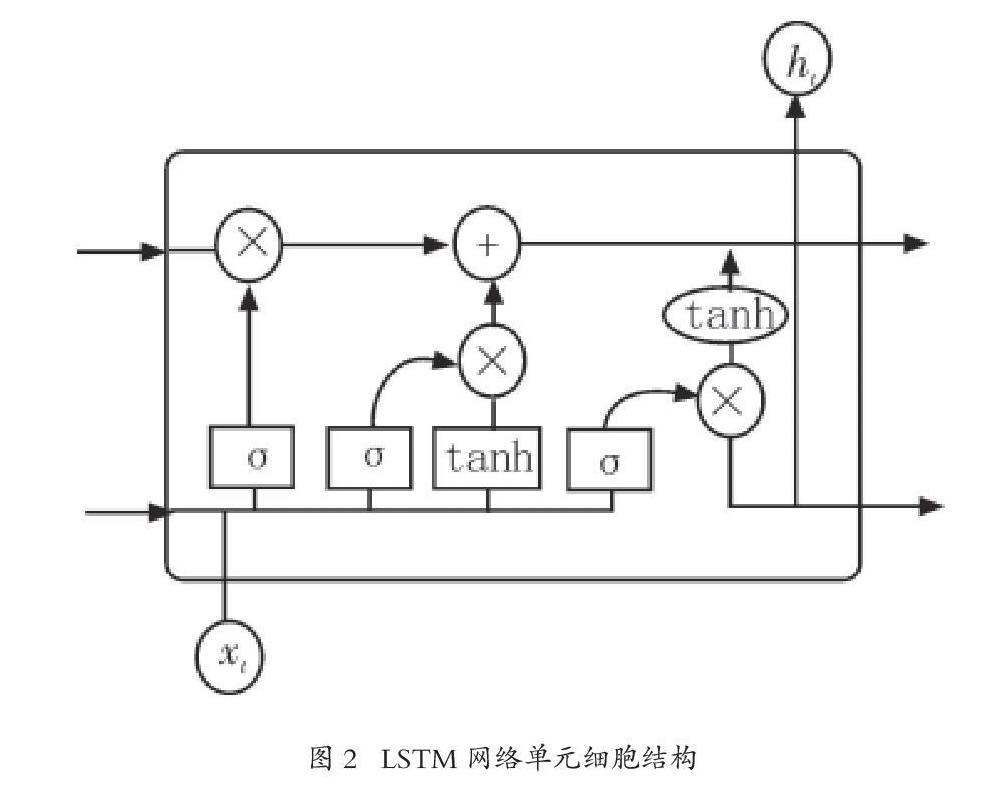
长短期记忆网络LSTM是一种特殊的RNN。可以學习长期依赖信息。LSTM与RNN最大的区别在于,LSTM中最顶层多了一条名为“cell state”(细胞状态)的信息传送带,其实也就是信息记忆的地方。该记忆模块被利用来替代循环神经网络中普通的隐含节点。当梯度在跨越多个时间间隔以后,确保其不会消失或者爆炸,传统RNN在训练中所存在的一些困难被一一加以克服。LSTM 神经网络的网络模型结构如图 2所示。
图2 LSTM网络单元细胞结构
本文使用此模型进行研究,是因为内河船舶信号的时间依赖特性极其强大。根据记忆特性,LSTM 神经网络模型可以对时序信息进行很好的动态分析。
2 船闸防撞系统组成
基于深度学习平台的船闸主动防撞系统,从环境感知技术着手,针对中国船闸复杂水路状况,研究船舶感知关键技术与系统;基于人类病毒免疫机制,设计出入闸船舶碰撞船闸威胁判别的核心决策算法;基于面向船闸的主动防撞特点,开发多普勒雷达网络测速节点、毫米波盲区探测装置及船闸主动阻拦系统。如图3所示。
图3 船闸主动防撞系统示意图
3 内河船闸主动防撞系统关键技术研究。
3.1入闸船舶数据采集处理
如图4所示。
船闸的防撞材料上设置无线加速度传感器网络节点,通过网关节点实时向监控中心传递监测数据,如图5 中的实际传输路径所示。同时采用自行开发的多普勒雷达测速节点、毫米波探测盲区装置。针对多普勒雷达测速网络的数据处理,进行入闸船舶的单/组合测速、航迹预测、特征提取及威胁评估算法的开发。针对阻拦系统的底层控制系统,利用鲁棒控制技术,对阻拦索/网的全自动机械结构进行提升、制动、下沉等关键动作进行测试。
3.2软件架构设计
在软件架构上,主要解决了即插即用的统一软件架构以及多核实时多任务分解机制。通过提取控制系统共性特征,抽象各环节的物理模型与行为特征,采用基于Model-base建模方法和状态机理论,建立输入、输出、控制等信号流、控制流、动力流、状态流表达方式及操作原则,规范信息传导与控制协调与公共区访问的时序逻辑关系,避免严重的控制冲突问题,确定完整的控制架构体系与相应的故障诊断与安全监控体系。采取虚拟机技术与符合AUTOSAR标准的多核实时操作系统相结合的方法,结合各相关控制系统的资源占用情况,采用并行触发任务协调、分配机制,实现多任务分解及负载均衡,使得智能控制中的各个策略、算法、安全防护得到有效协调并高效、实时、可靠运行。如图6所示。
3.3 船舶运动姿态预测及碰撞预警
在船舶出入闸的过程中,各种因素的干扰,往往会使船舶的运动姿态受到影响,表现出相对复杂的非线性状态,如各种噪声信号、混沌特性等因素。拟准确地预测短期姿态序列,常常比较困难。LSTM网络属于一种改进的深度学习算法,对历史信息具有保存能力,特别在时间序列的预测上,优势更加明显。其凭借当前值和历史数据,能够对时间序列进行非常好的预测。
基于以上考虑,本课题采用LSTM模型,对过闸船舶运动姿态进行预判和研究。系统整体框图及算法步骤,如下图7所示。
其中iterator表示一个周期迭代的次数,epoch表示当前模型迭代的周期数。
关于就流程图中的步骤与细节,做简单介绍:
第一步:进行数据预处理
船舶运动姿态时间序列在连续时间上是离散值。本着更好地训练数据的目的,本文将船舶运动姿态待输入的相邻时间序列差值,转换为正向输入差值向量。为了提高训练速度和便于分析,避免各个数据间因为量纲的不同,对长短期记忆神经网络模型带来的影响,本文在船舶姿态差值数据的基础上,对数据向量采用了归一化处理方式,即将有量纲的表达式,经过变换,化为无量纲的表达式,成为纯量。从而将输入数据向量和输出数据向量,限制在[-1,1]之间。
其映射表达式为:
(1)
这里,代表时间,代表时刻的输入信号,和分别代表时刻输入信号的最大值和最小值,和对应该时刻输入信号的映射范围,取值分别为1、-1。
第二步:长短期记忆神经网络模型参数初始化
有些因素对模型的预测性能会产生很大的影响,主要是:权值初始化方法Xavier,激活函数ReLU及选取的防止过拟合方法。另外,在长短期记忆神经网络模型对船舶姿态数据训练前,需要配置初始化方法与参数,因为在模型中,窗口函数宽度、学习率等因素,也会影响长短期记忆神经网络模型。
第三步:确定权值的梯度训练
长短期记忆网络模型的主要训练过程,一般是运用梯度下降法,对ANNs节点连接权值使其不断更新,然后结合验证误差率的要求,取得适当的权值。具体做法是求出数学表达式(1)的梯度。
第四步:训练输出
根据前述设置的窗口宽度,依据最后一批输入数据,未来短期内各个时刻数据值可以预测得到。在这之前,由LSTM模型的初始化参数,达到权值更新训练提前结束,也可以等到训练迭代结束。 [1]
第五步:反归一化处理
结合未来实际姿态序列值,运用各项指标分析预测结果,进而得到需要的结论,最后得到船舶运动姿态时间序列的未来预测值。做法是针对模型的预测序列,进行反归一化处理。
预警时间的阈值的设定,需要考虑到船舶行进的安全、操纵体验等因素。预警效果差往往因预警时间阈值设置较晚,结果无法保障安全;预警过于频繁一般是预警时间阈值设置过早,操纵体验效果不好。可见,预警时机是否合适,主要取决于行驶过程中预警阈值的选择。预警阈值设置得好,对船员干扰小,不会因预警显示过晚而出现无法避险的情况。
本文提出了一种不同船速下的安全预警时间阈值的计算方法,可以有效解决这个问题。当行驶船舶发出发生碰撞的危险预警信号,从船员做出的反应,到采取措施制动,直到船舶停止,安全防撞预警时间阈值Tc计算公式如下:
(2)
根据表达式(2),安全预警的时间阈值和船舶的行进速度相关联。借助对船速动态变化的实时检测,船舶安全预警的时间阈值可以及时的加以改变。同时,根据船速的不同,形成防撞的安全预警时间阈值大小。如果船舶直线碰撞、侧面碰撞的预设条件满足时,系统就会通过船载设备,不间断地接收到船舶的实时行进状态等信息,计算出船舶发生碰撞的大概时间,通过与安全预警的时间阈值及时比较作出判断。一旦确认会发生碰撞,就通过应用设备发出预警的相关提醒。[2]
3.4船闸主动防撞及拦阻装置设计
本课题采用的船闸主动防撞及拦阻系统,参考了目前现役航空母舰大量使用的阻拦装置——缓冲式液压阻拦系统。该系统主要由:拦阻网(拦阻索)及其支撑机构,滑轮缓冲装置、阻拦器装置、钢索末端缓冲系、复位系统、冷却系统等。阻拦器装置包括主液压缸、定长冲跑控制系统、蓄能器、膨胀气瓶、定滑轮组等,如图8所示。
图8 船闸主动拦截示意图
当入闸船舶失控将要撞向船闸时,启动阻拦网(索)。船舶撞上阻拦网后,滑轮索被拉动,通过滑轮缓冲装置、动滑轮组的拦网,主液压缸内部的活塞被带动。定长冲跑控制系统随即将主液压缸里的油液,擠压进蓄能器。通过控制阀的液体,压力会发生一定的损失,对液压油缸中的流动液体来说,会形成相应的阻尼,拦阻船舶继续行进,迫使船舶缓慢减速。最后,完全封闭控制阀的开口,停止了活塞及相连的运动滑轮组,最终控制船舶停止。
当船舶停止行进,拦阻网(拦阻索)与船头分开后,打开复位阀,蓄能器中的高压油液通过冷却系统,回流进主液压缸,拦阻网(拦阻索)返回至拦阻前的初始状态。在船舶挂索过程中,滑轮缓冲系统对钢索的张力峰值、应力波动充分消除或有效减退;拦阻过程中,船舶的动能被蓄能器吸收、存储;由于拦阻过程中存在滑轮转速不同,从而引起钢索的振颤,可充分钢索末端缓冲装置加以消除;主液压缸油液流入储能器的流量,由定长冲跑控制系统控制,拦阻过程中,主要控制的是主液压缸的压力、拦阻索的张力与船舶承受的拦阻力。根据船舶重量,借助重量选择器上的调节控制阀,控制其初始的开口面积,在相同距离上实现对不同船舶拦阻的目的。[3]
4 结束语
基于LSTM的内河船闸主动防撞系统,通过采用自行开发的多普勒雷达测速节点、毫米波探测盲区装置,完成入闸船舶数据采集处理;研究并行触发任务协调、分配机制,实现多任务分解及负载均衡,使得智能控制中的各个策略、算法、安全防护得到有效协调并高效、实时、可靠运行;将LSTM模型应用于船舶运动姿态预测,实现船舶运动碰撞预警;参考国内外现役航空母舰上普遍使用的拦阻装置,研究使用一种船闸主动防撞装置。从实验结果和应用情况来看, 该系统可以有效的提升内河船闸主动防撞的安全性, 能有效解决内河船闸中的预警及防撞避碰等问题。进一步,在产业化推进以后,船闸主动防撞系统在保障航行安全和人民生命财产安全、解决水路交通拥堵和水道环境污染、提升航道通行能力等方面,将给人们的工作生活带来切实的收益,具有重要和突出的社会效益。
参考文献:
[1]王国栋.基于LSTM的舰船运动姿态短期预测及仿真研究.江苏科技大学,2017.
[2]谢礼猛.基于DSRC车载通信的车辆防撞预警研究.江苏科技大学,2017.
[3]张丽伟. 对航母舰载机“阻拦索”的初步认识. 物理教学探讨, 2014.
[4]许宁等.改进型LSTM变形预测模型研究.江西理工大学学报,2018.
[5]郭冠呈等.基于双向长短时神经网络的水量预测方法研究.给水排水,2017.
[6]姚开一等.基于神经网络的地震震相自动拾取方法.电子设计工程,2018.
猜你喜欢
科学家(2022年3期)2022-04-11
小学阅读指南·低年级版(2020年11期)2020-11-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
现代兵器(2016年10期)2016-10-26
新高考·高一物理(2016年3期)2016-05-18
金融周刊(2015年1期)2015-08-24
爆笑show(2015年1期)2015-03-26