
一种三维纳米定位台控制系统设计
2019-01-08 08:37何坚夏宏颜锦耀范贤光
数字技术与应用 2019年10期
何坚 夏宏 颜锦耀 范贤光

摘要:这篇文章描述了一种三维纳米定位台控制系统。本系统采用双处理器架构,将ARM在逻辑控制、人机交互的优势同FPGA硬件可编程、并行处理的优势互补,再搭载自行设计的高精度ADC电路及DAC电路,完成了对三维纳米定位台的高精度运动控制。
关键词:控制系统;纳米定位;ARM;FPGA
中图分类号:TH74 文献标识码:A 文章编号:1007-9416(2019)10-0171-02
随着科学技术的飞速发展。从微生物、细胞、到分子、原子,人类对微观世界的探索逐渐提高到纳米、埃米量级,纳米控制技术成为尖端科技研究中的迫切需要。
目前主流的纳米定位平台主要是基于压电陶瓷来实现,控制系统主要以PC板卡或嵌入式系统为控制核心。采用单片微控制器来实现,会导致占用系统资源太高,难以提高多维度的定位效率。本文设计一种ARM和FPGA相结合的嵌入式控制系统,给出其硬件电路原理和程序实现流程,实现了闭环控制的纳米定位台控制系统。
1 系统硬件
1.1 系统硬件架构
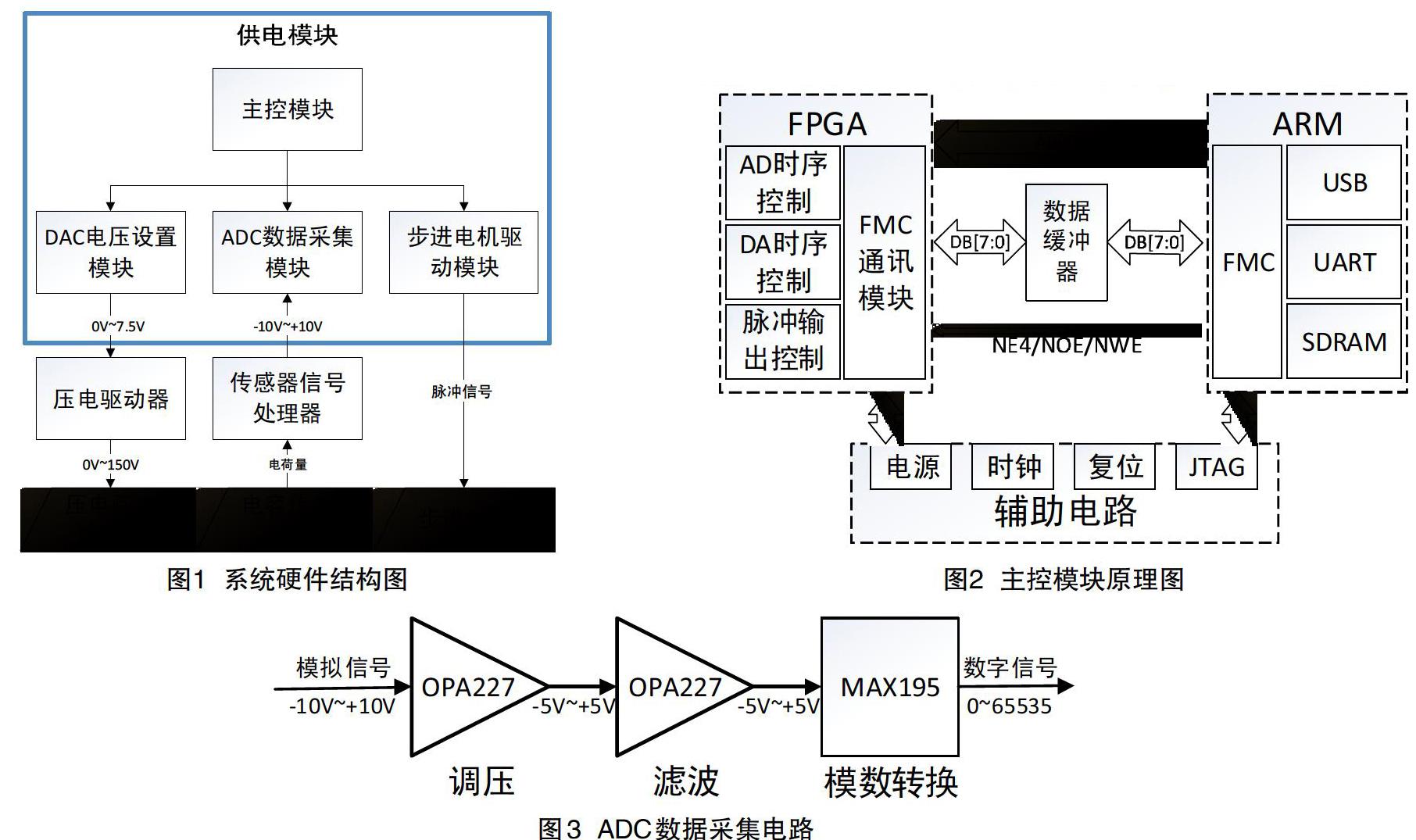
系统硬件结构如图1所示,由主控模块、ADC数据采集模块、DAC电压设置模块、步进电机驱动模块及供电模块等共同构成。步进电机驱动模块完成对步进电机的控制实现位置的粗调整,DAC电压设置模块输出控制电压,经过压电驱动器驱动压电陶瓷伸缩实现定位,ADC数据采集模块将经过信号处理器处理过的电容传感器的位置信号采集并传至主控模块,主控模块完成各模块逻辑、时序控制并与上位机通信。
1.2 主控模块
在主控模块中,选用ARM公司的STM32H743IIT6作为主控制核心,选用Alter公司的EP3C25Q240C8型号的FPGA作为从控制核心。ARM完成与上位机进行USB通信、任务控制及实现PID控制,FPGA完成对ADC和DAC模块的时序控制以及步进电机的控制。ARM通过FMC接口与FPGA进行并行数据传输,FMC接口电路如图2。
1.3 ADC数据采集模块
在该模块中,选用美国Maxim公司推出的一种16bit逐次逼近的串行模数转换器MAX195,它转换速度快、精度高、低功耗。ADC数据采集模块原理图如图3,两级运算放大器OPA227构成信号调理电路,-10V~+10V输入模拟信号首先经过前级放大器降压至-5V~+5V,后级放大器再进行信号滤波。滤波得到的模拟电压量再通过MAX195进行模数转换,得到16位数字量以串行方式传输到FPGA。
1.4 DAC电压设置模块
在DAC模块中,选用美国ADI公司的AD5541,AD5541是一款单通道、低温漂、16位串行输入、无缓冲电压输出的数模转换芯片。DAC电压设置模块原理图如图4,FPGA将16位的开关量经过TLP2630进行光电隔离,以串行方式输入AD5541完成数模转换,输出0V~+5V(VREF)模拟电压量,再经过AD8512放大后,最终输出电压范围在0V~7.5V。
2 系统软件设计
在程序设计上,系统上电直接完成软件和硬件的初始化,然后通过PC端上位机输入目标位置及移动速度等参数后传入ARM,再控制步进电机完成粗定位,到达目标位置附近,由DAC任务实现高精度定位,同时ADC进行实时采集位置传入反馈环,进行PID调整后对DAC进行控制。直到ADC检测达到目标位置后,定位任务结束。主程序流程图和PID控制流程图分别如图5和图6。
程序说明:r(n)目标位置值、e(n)当前误差、e(n-1)上一次误差、e(n-2)上上次误差,u(n)输出DA值。
3 测试结果
设计完成后,对系统硬件电路的主要指标进行测试。对于ADC数据采集电路,支持输入电压范围-10V~+10V,最大采样率为85ksps,灵敏度达到0.3mV。对于DA电压设置电路,输出电压范围在0V~7.5V,通过设定固定的一组码值,经六位半数字万用表测出电压分辨率和输出精度均达到16位,稳定性好,满足应用要求。
4 结语
文中设计了一个基于ARM和FPGA双核心架构的嵌入式控制系统用于控制三维纳米扫描台。克服了ARM顺序执行、FPGA逻辑控制不便等的缺点,采用16位的AD和DA芯片,设计了高灵敏度的数据采集电路和高精度的电压设置电路,在软件上采用PID算法完成了定位运动的闭环控制,整体达到了纳米定位控制系统的要求。
参考文献
[1] 魏强.纳米定位微位移工作台的控制技术研究[D].山东大学,2006.
[2] 李瑞君,赵文楷,何园涛,黄强先.一维纳米定位控制系统[J].红外与激光工程,2018,47(10):334-339.
[3] 嚴亮,舒志兵.基于ARM+FPGA的机器人多轴运动控制器的设计与研究[J].机床与液压,2019,47(11):12-18.
