
基于概率计算的双站无源定位误差分析
2019-01-15 03:35余建宇
火控雷达技术 2018年4期
郭 磊 余建宇
(西安电子工程研究所 西安 710100)
0 引言
无源侦察是指通过截获目标辐射源的信号获取目标特性的技术[1]。与其他探测手段相比,无源侦察具有隐蔽和探测距离远的优点,同时也存在探测精度较低,获取目标参数维度少的缺点。随着近年技术的发展,无源侦察参数获取维度逐步增多,其中无源定位技术可对目标位置进行探测,为无源侦察技术的发展提供了新的应用方向。
当前目标定位精度的指标主要为圆概率误差(CEP)[1],而对圆概率误差的考核方式主要依据实际产品目标定位的实测数据进行分析后进行考核和评价,缺乏切实有效的计算方法从产品设计之初对产品的定位精度进行有效的评估与预测。同时有效的计算模型也可以为不同应用场景下,不同布阵方式条件下的定位精度计算、最优化布阵及使用等提供理论支撑。
当前主流的无源定位方法主要包括三角定位、相位差变化率定位和时差定位法,三种定位方法[2]虽然采用不同的特征参数实现定位,但其定位原理均为通过多维信息测量后的曲线相交实现交叉目标定位,因此其误差分析方法相似性较高。因此本文以三角定位为例对其定位误差进行分析。
1 模型建立
三角定位的主要原理为通过单站运动或双站对目标信号进行到达角进行测量[2],根据多个达到角参数实现对目标的定位,如图1所示。
在三角定位方法中,能够对目标实施定位的前提条件为双站或单站在运动轨迹中可对目标进行多次到达角测量,到达角测量精度通常采用均方根误差进行评价[3],因此在单站测角情况下,测角值符合以真实角度为均值,测角精度为标准差的正态分布,当真实到达角为45°,标准差为5°时的到达角概率密度分布如图2所示。
基于图1和图2所示结果,当对目标进行三角定位时,两站均存在测角误差,目标的真实位置应位于两站测角值的交叠位置[4],如图3所示。
考虑到目标位置与两站定位的关系为根据两站测角值联合测算目标方位,即目标位置同时取决于两站的测角值,如图1中,目标所处位置应同时满足探测站1测角值为θ1且探测站2测角值为θ2,因此实际目标位置的概率密度分布应符合两站测角概率密度分布的联合概率分布[5]。因此目标位置的概率分布如图 4所示。
圆概率误差定义为以目标实际位置为圆心,探测位置落入指定半径圆内的概率为50%时,该圆的半径即为圆概率误差[6],由图4的概率密度分布可知,求取定位的圆概率误差即变为求取指定圆内的概率分布函数问题。
2 圆概率误差计算
根据上文所述模型,以真实目标位置为圆心,以半径R画圆,探测位置落入圆内的情况如图5所示。
在图5中,两条实线代表两站测量到达角方位,分别为θ1和θ2,其交点则为两站探测到的目标位置,圆实点位置为目标实际所在位置。由此可得,探测目标位于pi的概率与两站测量角度θ1、θ2的概率关系[1]如式(1)所示。
p(pi)=p(θ1θ2)
(1)
由于两站测量角度互相独立,令探测站1测量角度概率为p1,探测站2测量角度概率为p2[1],其关系简化为式(2)。
p(pi)=p1(θ1)p2(θ2)
(2)
由式(2)可知,要求得探测目标位置位于指定圆C内的概率只需在圆内所有位置的概率求积分即可,如式(3)。
(3)
由前文可知,测角值通常符合高斯分布,真实目标位置和探测站位置确定,因此测角值期望已知,同时在测向系统中误差通常为均方根误差,因此在确定的测向系统中,测角值的标准差也已知。为计算得出式(3)中定位值落入指定圆内的概率值,只需确定其积分边界,即两站在指定圆范围内的角度取值范围。首先确定单站的角度取值范围,如图6所示。
在指定圆形区域内,探测站2的角度取值范围为其所在位置与圆形区域切线间的夹角,其与单站法线方向的夹角分别为α1和α2。
当探测站2的测角值为任意值α时,探测站1的角度取值范围如图7所示:
由图7可知,在探测站2角度为α时,探测站1角度取值范围为与探测站2测角方向与指定圆形区域的两交点之间的夹角,与探测站1法线的夹角分别为β1与β2。
根据图6,圆形区域与过探测站2位置的直线的交点为式(4)的解:
(4)
其中xc、yc为圆心,x2、y2为探测站2的位置,根据坐标系定义,y2为0,带入求解,得式(5)。
(5)
当式(5)具有唯一解时,求得的点为线与圆的切点,因此有式(6)。
(6)

(7)
3 仿真及应用
根据式(5)和(6)进行仿真计算,在图1的探测站布阵方式及目标相对位置条件下,不同测角精度下的定位误差如表1所示:
表1 不同测角精度下的定位误差
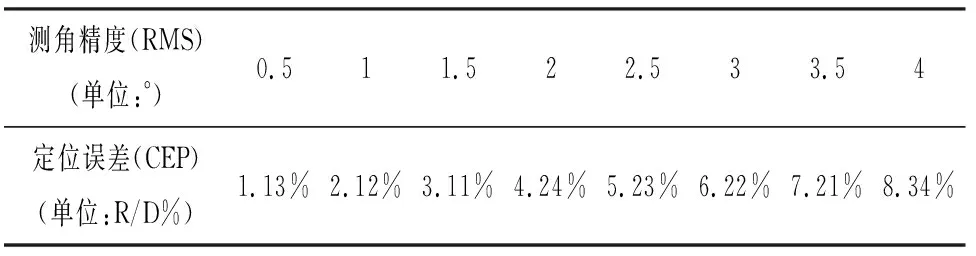
测角精度(RMS)(单位:°)0.511.522.533.54定位误差(CEP)(单位:R/D%)1.13%2.12%3.11%4.24%5.23%6.22%7.21%8.34%
根据表1可知,在相同的布阵方式下,固定的目标位置条件下,定位误差与测角误差为近似正比线性关系。
在相同的布阵方式下,测角误差为1°时,目标在不同位置时的定位误差绝对值如图8所示。
由于探测目标过于靠近探测站时,其探测误差增加较快,同时在实际使用中,不存在该情况,因此在计算中,将靠近探测站的点剔除,不进行误差计算。在图8中,横向距离轴上△点为探测站位置,其余位置的对应点的值即为该点位置下的定位圆概率误差值,从图中可看出,在探测站所夹的区域内,全局最优点位于两侧靠近探测站的位置,其为近区最小误差点,如图9所示;在距离目标较远时,其最优解位于两探测站中线位置,如图10所示。
由图9和图10综合分析可知,当远距离对敌方目标进行探测时,应首先考虑探测站部署于目标位于两站中线附近,而在实际使用中,如果具备单站突前逼近的条件,则可获得更高的测量精度。
4 结束语
本文通过理论推导、仿真分析的方式提出了基于概率计算的无源探测系统三角定位的圆概率误差的计算方法,改善了该问题目前没有通用化较好计算方法的现状,为无源定位误差分析以及应用提供了新的方法和思路。
后续在本文的计算模型场景下,针对不同无源定位方式,不同使用场景下的工作仍需继续开展,同时在针对三角定位条件下,更广阔的定位区域,更灵活的布阵条件下定位精度问题的研究仍需进一步细化。
无源定位技术以其先敌发现、高隐蔽性的特点,在未来必然有更大的应用前景,对其定位精度的研究也必然将更加细致和深入,本文提出的方法可以作为后续研究的基石,支撑更多的在工程和使用领域的研究。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高三版(2021年3期)2021-05-14
火控雷达技术(2021年1期)2021-04-20
舰船电子工程(2020年9期)2020-10-30
现代防御技术(2019年5期)2019-10-28
中国航海(2019年2期)2019-07-24
航天电子对抗(2018年3期)2018-07-14
