激光诱偏干扰技术在车载主动防护系统中的应用
2019-03-23 03:33茹志兵雷海丽郭玉玉
应用光学 2019年2期
高 玮,茹志兵,雷海丽,汤 磊,郭玉玉
(1.西安应用光学研究所,陕西 西安 710065;2.中国兵器科学研究院,北京100089)
引言
现代战场上,激光半主动制导导弹、激光驾束制导导弹是现役装备量最大、技术最成熟,具有精确打击能力和强杀伤力的威胁源,也是车载主动防护的重点防御目标。如何提高车载武器系统在战场上的生存能力,是现役和未来车载主动防护系统面临的重大挑战[1,15]。为了防御和对抗激光、红外半主动制导、激光驾束制导等武器的攻击,各国发展了激光、红外、烟幕干扰技术,其中激光干扰技术主要有激光诱偏干扰对抗系统和激光压制对抗系统。如美国的AN/GLQ-13车载激光诱偏系统、LATADS激光对抗诱饵系统等是已经装备的激光欺骗性对抗系统,主要用于干扰激光制导武器。在作战时,当被保护区域探测到有来袭威胁的激光信号逼近时,车载主动防护系统通过激光诱偏干扰技术向假目标发射覆盖或等同于被干扰目标的光电频谱信号,并且在很短的时间内完成有效的干扰时机,诱导敌方激光制导导弹攻击假目标,起到了欺骗干扰的作用。
现代车载主动防护系统通常由3部分组成:探测系统、控制系统和对抗系统[2]。它的工作原理是通过探测系统获取来袭目标的特征信号,利用控制系统对特征信号进行分析,同时发送控制命令对目标信号进行对抗防御,降低车辆被命中的概率,达到防护的目的。本文通过实验装置模拟了来袭威胁目标照射、目标信号的探测识别、干扰信号的产生、控制和跟踪过程,实现激光诱偏干扰技术。
1 目标特性分析
半主动制导导弹作为车载主动防护系统的典型威胁源,其工作原理是:目标指示器装备在车载、单兵或其他移动单元1上,其输出的激光指示信号2指向预攻击目标。装备在导引头里的探测系统3探测到目标表面漫反射的回波信号,接收器对回波信号进行处理后得出导弹的偏角信息,进而形成控制指令、改变弹体飞行姿态,使弹体沿着反射激光信号飞行,最终命中目标,其示意图见图1所示。
对半主动激光制导技术的工作原理分析可以发现半主动激光制导的2个缺点:1) 指示激光信号对目标进行指示时,对方布置在目标附近的光电告警系统就能够感知到,通过一定的信号处理过程,进而提取出目标指示激光的码型信息;2) 激光指示器装备在装甲车、单兵或者其他运动单元上,而信号接收器放置在武器系统上,两者是分离的,信息不可能做到完全同步,而且制导的过程也需要时间,这是对其成功对抗的关键[3-4]。
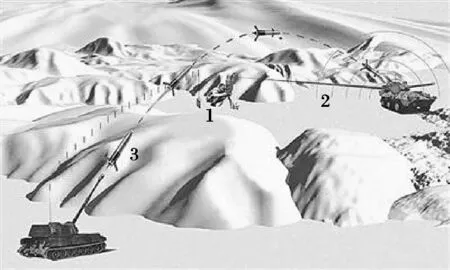
图1 半主动激光制导技术示意图Fig.1 Schematic diagram of semi-active laser guidance technique
2 激光诱偏干扰技术
当车载光电告警系统在监视范围内探测到有威胁目标的激光信号照射时,告警器对发现的光信号经过探测识别和数据处理算法,提取出该指示激光的编码信息,将编码信息输出给干扰机,并据此发射干扰激光照射假目标,实现对半主动制导武器的干扰。干扰系统主要由激光告警器、探测识别系统、控制系统、激光干扰发射器和假目标等组成,工作示意图见图2所示。
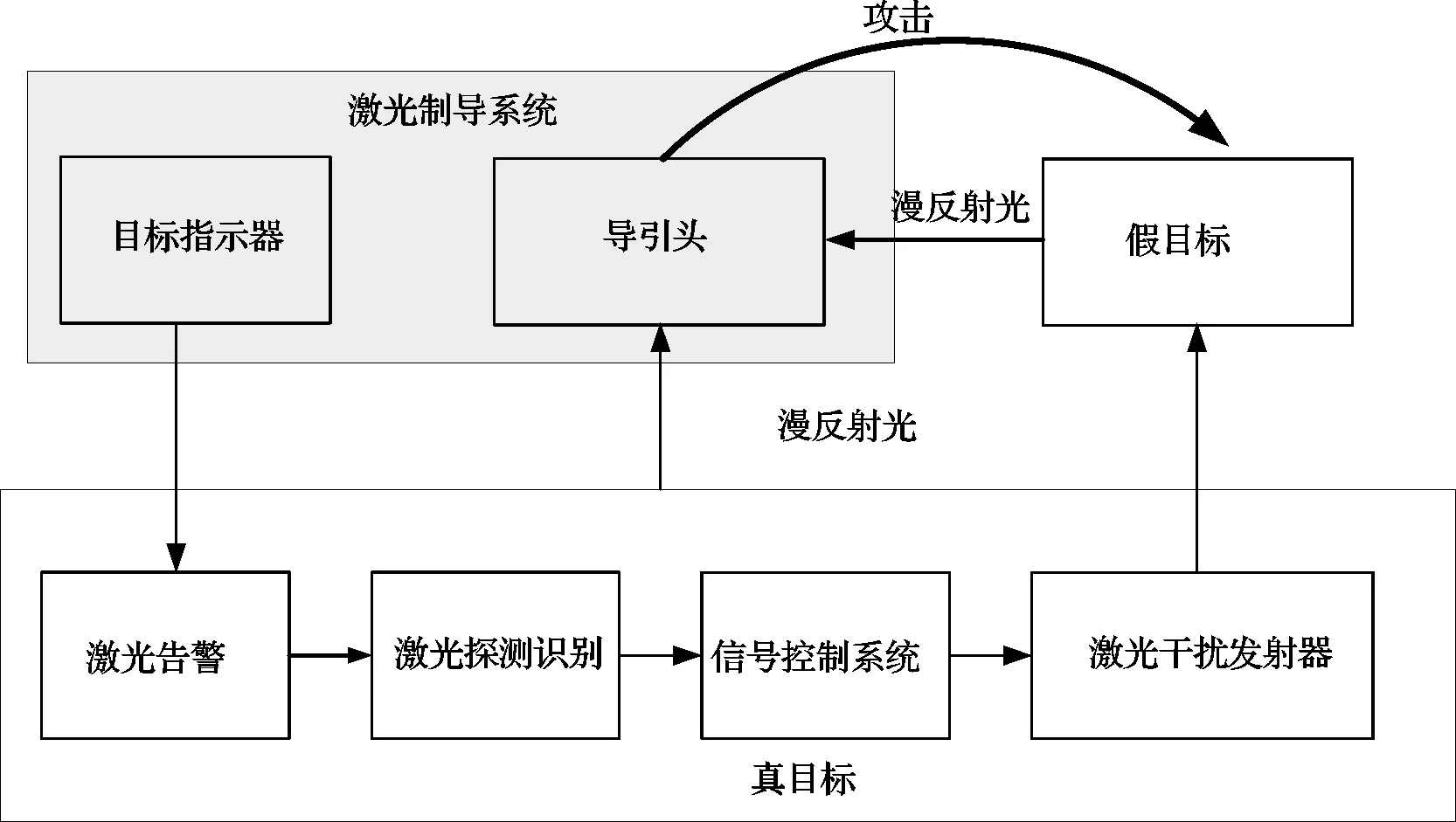
图2 激光诱偏干扰系统工作示意图Fig.2 Schematic diagram of laser incduced bias and interference system
激光诱偏干扰技术包括回答式干扰和同步转发式干扰2种方式:1) 回答式干扰。该技术通过一定的数据处理算法提取出信号的编码信息,以第一次接收到信号为起始点,计算出下一次照射的时机节点,使干扰信号在时序上同步或先于指示信号,发出与指示光编码信息一致的干扰光,照射假目标,进而实现对导弹的干扰目的。2) 同步转发式干扰。该技术通过将接收到的光信号经过一定的放大展宽后,在极短的时间内输出触发信号激活己方的干扰机工作,输出干扰信号指向假目标。该方式要求干扰机的响应时间极快,使干扰脉冲进入导引头的选通波门内,且能量要大于威胁目标指示激光能量,以便能够被对方接收机采样达到识别干扰的目的[5-7]。
实际应用中,激光目标指示编码脉冲的宽度达到ns级时,激光干扰和敌方目标指示信号几乎不能同步,激光干扰信号不能通过抗干扰波门,回答式干扰无法实现。为了有效实施激光诱偏干扰,本文采用同步转发式干扰工作模式,通过调整激光干扰机的输出能量和假目标的激光反射率,使敌方导引头更易认同和接收干扰信号为激光制导信号。
3 激光诱偏干扰演示实验
为了验证同步转发式激光诱偏干扰系统对目标指示器的快速识别、跟踪及干扰能力,设计了一套激光诱偏干扰演示系统,如图3所示,分别为漫反射板、激光跟踪系统和诱偏干扰系统。其中漫反射板的真目标和假目标区域涂层反射率不同,假目标反射率高于真目标;激光跟踪系统用于模拟激光半主动制导的工作方式,诱偏干扰系统用于激光告警器的探测识别目标特征信号和控制干扰激光光斑的指示。
工作流程:1) 跟踪系统中目标指示器发射激光照射目标;2) 跟踪平台开始工作,解算出目标的偏角信息,并驱动电机跟踪目标光斑;3) 目标附近激光干扰机探测到回波信号,通过同步转发工作模式激发干扰机工作,在极短时间内输出同步干扰激光指向假目标;4) 干扰激光进入跟踪平台光学视场,跟踪平台偏离对目标光斑的跟踪轨迹,转向假目标,从而实现干扰功能。

图3 激光诱偏干扰实验结构示意图Fig.3 Schematic diagram of laser induced bias and interference experiment
3.1 激光跟踪系统
激光跟踪系统工作示意图如图4所示。目标指示器输出激光照射漫反射板,四象限探测器将回波信号转换成电信号,放大器对微弱电信号进行放大,以实现精确测量的目的[8-9]。放大后的信号脉宽在几十纳米量级,通过高速A/D转换器将模拟信号转换成数字信号,通过ARM处理器对数据进行运算得到角偏差量,控制电机始终指向光斑中心位置[10]。

图4 跟踪系统工作原理图Fig.4 Working principle diagram of tracking system
3.2 激光干扰系统
激光干扰系统的工作流程如图5所示。光电探测器探测到跟踪系统的目标指示信号,通过放大电路将信号放大到干扰机的触发电平,把放大后的信号整形成数字信号送入激光器的驱动电路来触发干扰激光器输出干扰激光,这要求干扰激光器具有较快的响应时间,以保证干扰信号可以被导引头采样到,进入采样选通窗口[11]。

图5 干扰系统工作原理图Fig.5 Schematic diagram of interference system
4 实验数据及分析
本实验中目标指示器选用的是905 nm的半导体激光器,为了直观地观察实验过程,本文将632 nm的红光激光笔固定到激光跟踪平台水平面,激光笔跟随平台同步转动,光斑在有十字分划线的刻度板上同步移动,旁边用摄像机记录下数据,同时解算出跟踪平台转动的角度。

图6 激光干扰实验示意图Fig.6 Schematic diagram of laser interference experiment
为了实验方便,将目标指示器光斑的初始位置设定在刻度板的0°位置,目标指示器开始工作→激光跟踪平台跟踪目标光斑→激光干扰系统输出干扰光斑→跟踪平台跟踪干扰光斑,激光笔跟随激光跟踪平台的运动轨迹得到图7和图8的实验数据图。
图7中从曲线b点激光跟踪系统开始工作,系统进入正向搜索阶段,此时跟踪在-4°左右的位置。c点为正向扫描完成,平台开始反向扫描,反向扫描在d点完成,跟踪平台开始跟踪目标,跟踪平台迅速移动到0°光斑位置,即实验中设置的指示激光初始位置。在e点启动干扰机,干扰系统照射假目标,ef段,跟踪平台偏离初始0°位置,跟踪干扰光斑,整个过程持续了大约7 s的时间。

图7 跟踪平台方位移动轨迹Fig.7 Track of platform azimuth movement
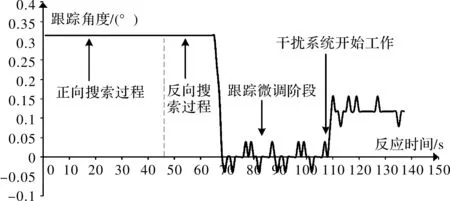
图8 跟踪平台俯仰移动轨迹Fig.8 Track of platform pitch movement
图8为俯仰方向的移动记录,跟踪平台在搜索扫描过程中记录目标光斑的位置信息,扫描完成后迅速转向跟踪到目标光斑位置,成功跟踪到目标。从图中可以看出,前期跟踪搜索时间为40 s,从跟踪到干扰用时大约7 s。
综上所述,本文通过跟踪系统和干扰系统模拟了真假目标的激光光源的实现,建立了指示激光和干扰激光的时序关系,实时控制跟踪系统对光斑的稳定跟踪[8],记录了目标光斑和干扰光斑的跟踪运动轨迹。通过对跟踪轨迹图形的分析,可以看出跟踪系统能够实时跟踪目标信息,当干扰系统探测识别到目标光斑后,迅速解算并驱动该系统的激光器输出假目标光斑,当干扰光斑进入到跟踪系统的光学接收视场时,跟踪系统偏离之前的运动轨迹,转而跟踪假目标,从而实现了同步转发式的激光诱偏干扰技术[12]。
5 结论
通过激光跟踪系统模拟半主动激光制导武器的制导过程,建立了目标模型,验证了同步转发式激光干扰系统对目标的诱偏干扰,可装备在车载主动防护系统中用于提升作战中的自我防护能力。目前车载主动防护系统的反应时间要求在10 s以内[13-14],本系统从探测识别到干扰的反应时间为7 s,能够满足使用要求。后续会根据目标模型、大气传输模型和目标距离等参数,解算和控制干扰光斑的能量和束散角,通过提升探测系统和信息处理系统的响应时间、伺服跟踪系统的精度和带宽等措施来提高干扰系统的工作性能,从而提升车载主动防护系统在战场上的抗制导能力。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
航天电子对抗(2019年4期)2019-12-04
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
北京航空航天大学学报(2017年9期)2017-12-18
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10