
基于MTM和灰色关联的椒盐噪声滤波算法
2019-04-19 05:24沈德海
计算机技术与发展 2019年4期
沈德海,鄂 旭,侯 建
(渤海大学 信息科学与技术学院,辽宁 锦州 121013)
0 引 言
在许多科学研究领域,数字图像是信息获取的主要来源。由于图像采集设备、传输介质及成像设备等的不完善,获得的图像信息中往往存在不同程度的噪声,造成图像质量下降[1],其中对图像质量影响最大的主要是脉冲噪声。在所有的脉冲噪声中最常见的是椒盐噪声,椒盐噪声在图像中表现为随机出现的黑点或白点,直接对图像的分割、特征提取及图像识别等处理结果产生较大的影响。因此,如何有效地滤除图像中的椒盐噪声一直是国内外很多学者热心关注和积极探索的热点问题。
中值滤波算法(MF)是当前应用最为广泛的一种去除椒盐噪声的有效算法,算法对椒盐噪声滤除效果较好,滤波过程不进行噪声判断,对图像中每一像素点均采用窗口内所有像素点的中值替换,在滤除椒盐噪声的同时,也造成图像信号点的改变,导致图像中的边缘及细节等处产生模糊,影响图像的边缘提取及分析等后续工作。因此,一些改进的中值滤波算法相继提出,如开关中值滤波算法[2-7]、极值中值滤波算法[8]等。这些算法先检测噪声点,只对噪声点采用改进的中值滤波算法进行处理,能较好地抑制噪声,同时能较好地保护图像的边缘细节。灰色系统理论(grey system’s theory)[9]是由邓聚龙提出的,用于研究信息部分清楚、部分不清楚并带有不确定性现象的特殊领域问题。灰色系统理论在当前的工业、农业、经济、气象、地质勘察、过程控制、环境保护等众多领域[10-11]应用广泛。近年来,灰色理论也应用到了图像处理领域,为图像处理开辟了一种新思路,并取得了不错的效果。在去噪研究方面,一些学者提出了许多新的算法,如文献[12-15]提出的去除椒盐噪声和混合噪声的滤波算法有效地利用了灰色关联理论,在去噪问题上进行了积极的探索和实践,取得了较好的效果。借鉴MTM滤波原理,结合灰色理论,文中提出了一种利用灰色理论去除椒盐噪声的滤波算法,并通过实验进行验证。
1 文中算法基础
1.1 MTM滤波算法
MTM(modified trimmed mean)[14]滤波算法借鉴了中值滤波和均值滤波算法分别对椒盐噪声和高斯噪声良好抑制性能的特点,在对第i个像素进行处理时,先选取以第i个像素为中心的滤波窗口内各像素的灰度中值mi。以mi为中心选取一个灰度区间[mi-δ,mi+δ],然后计算所有像素值落在选定灰度区间范围内的像素点的平均灰度值,将平均灰度值作为滤波输出。MTM算法的滤波输出可表示为:
fi=average{(xi)|mi-δ≤xi≤mi+δ,i∈Si}
(1)
其中,fi为滤波输出;Si为滤波窗口内的像素点灰度值集合。
算法采用中值作为选取的灰度区间的中心点,能够有效地抑制椒盐噪声,同时也对所选灰度像素区间[mi-δ,mi+δ]内的像素点进行平均处理,在一定程度上抑制了高斯噪声。算法也存在一定不足,即在选取灰度区间时,没有考虑去除椒盐噪声点,随着噪声密度增大,选取灰度区间可能存在噪声点。因此,算法对较低密度的椒盐噪声抑制效果较好,但随着椒盐噪声密度的增大,算法性能下降较快,对于较高密度的椒盐噪声抑制效果不佳。
1.2 灰色关联度原理
在灰色系统理论中,灰色关联分析是一种重要的系统分析方法,该方法利用系统中因素间的相互关联及发展态势的接近程度,进而度量各因素之间的关联程度。灰色关联分析方法在众多科学领域应用广泛,取得了显著的效果。灰色关联分析中常用的关联度的计算方法如下:
ζi(k)=

(2)

2 基于MTM和灰色关联的椒盐噪声滤波算法
可以把带有椒盐噪声的数字图像看作一个系统,各像素间具有较为复杂的联系,同时具有突出的灰色性。即邻域内一些未受噪声干扰的像素点是已知的,而受椒盐噪声干扰的像素的原始值是未知的。因此,在去除图像噪声时,采用灰色关联分析法计算噪声图像邻域像素之间的关联程度,进而对被噪声干扰像素的原始像素值进行预测。标准中值滤波算法(SMF)不做噪声检测,所以导致图像细节模糊。MTM算法没有去除所选取灰度区间内的噪声点,虽然较好地利用了邻域相关性原理,但对于区间的定位还不理想,且将椒盐噪声点选取进来,造成计算区间灰度均值时出现较大误差,在椒盐噪声密度较大时,存在一些未滤除的噪声点,滤波效果不佳。文中对MTM算法中的灰度区间选取方法进行了改进,并结合灰色关联度思想对噪声点原始像素值进行预测,排除了椒盐噪声对像素原始值预测的干扰,并利用了灰色关联原理计算了各非噪声像素的权值,有效地预测了噪声像素的原始灰度值。具体步骤如下所述。
2.1 灰度区间选取
文中算法采用3×3滤波窗口,由于椒盐噪声点灰度值呈现极值特性,将灰度值为0或255的像素点判断为椒盐噪声点,对于滤波窗口中心点为噪声点的像素,进行以下滤波处理,非噪声点保持原值不变。选取非噪声点像素的值作为集合Si,然后以集合S中的中值mi为中心,选取灰度区间[mi-δ,mi+δ],将落在该区间内的像素值作为集合Ck,δ为区间选取阈值,可根据不同图像进行调整。经过实验测试,该值取30时滤波效果最佳。
2.2 比较序列和参考序列的确定
将集合Ck内的像素值确定为比较序列,计算集合Ck内的像素值的平均值Ca=mean{Ck}作为参考序列。
2.3 数据变换处理
在计算关联度前对比较序列进行变换处理,消除数据因量级大小不同带来的影响。文中采用均值化方法进行数据变换,如式3所示:
(3)
2.4 计算关联系数
图像处理中,参考序列和比较序列一般都采用一维向量,所以算法采用式2的简化公式作为关联系数计算公式,如下:
ζ(k)=
k=1,2,…,n
(4)
其中,x0(k)∈Ck是比较序列元素变换处理后的元素,k为集合Ck内的像素值个数,x1(k)为参考序列,即Ca=mean{Ck}。ζ(k)是比较序列x0(k)与参考序列x1(k)之间的关联系数。
2.5 滤波输出
采用min-max方法将灰色关联系数ξ(k)进行归一化处理,将得出的vk作为权值,再将比较序列Ck内的各元素值和其对应的权值vk进行加权运算,结果fi即作为滤波输出。
(5)
3 实验效果验证及分析
为了验证文中算法的性能及对各算法的效果,在Matlab 2010仿真环境下,采用256×256灰度图像Lena作为测试图像,依次采用SMF(标准中值滤波)算法、EMF(极值中值滤波)算法、MTM算法及文中算法对不同噪声干扰图像进行性能测试,其中MTM算法和文中算法的区间选取阈值δ均为30。滤波结果对比如图1~图3所示,表1为各算法的客观评价尺度PSNR对比。

图1 1% salt and pepper noise滤波效果

图2 50% salt and pepper noise滤波效果
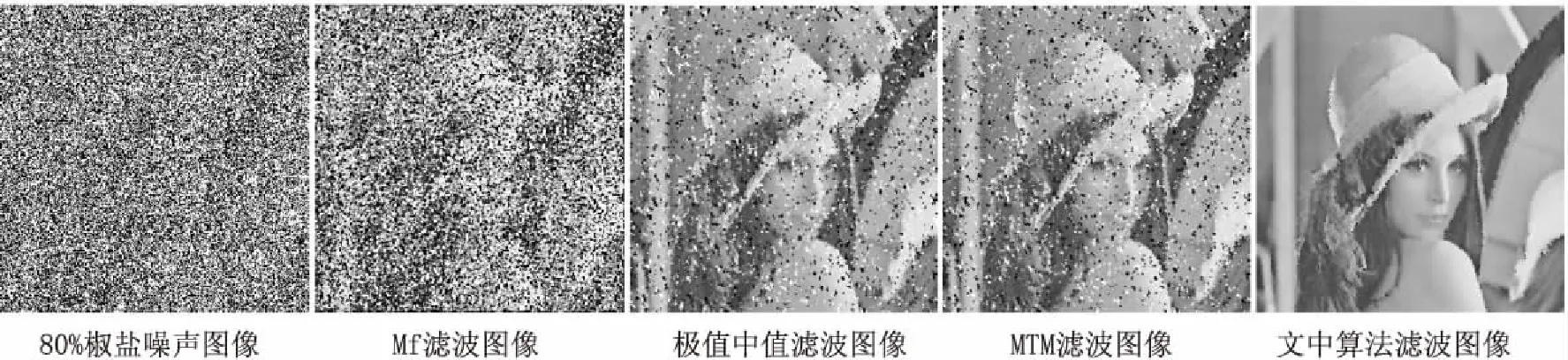
图3 80% salt and pepper noise滤波效果
对比图1~图3的滤波效果能够看出,三种滤波算法对噪声污染较轻的图像均具有较好的去噪性能,输出图像比较清晰;但当噪声污染增大到50%时,标准中值滤波算法的去噪性能下滑较快,输出图像中有较多的椒盐噪声点未滤除,极值中值算法和MTM算法的滤波图像去噪性能略有下降,图像中出现一些椒盐噪点,文中算法的输出图像依然比较清晰,无噪点。当噪声污染达到80%时,标准中值滤波算法几乎完全丧失了去噪能力,极值中值算法和MTM算法的去噪性能也大幅度降低,输出图像中有很多未滤除的噪声点,边缘细节也开始模糊,而文中的算法滤波图像仍然比较清晰。

表1 算法的客观评价尺度PSNR对比
从表1中不难看出,在不同密度噪声干扰情况下,文中算法的PSNR均高于其他几种算法,随着椒盐噪声密度不断增大,文中算法的PSNR值下降较慢,极值中值算法和MTM算法的PSNR值下降较快。可见,文中算法具有较为良好的去噪能力和边缘保护效果。
4 结束语
基于灰色关联理论,结合MTM算法,提出了一种抑制椒盐噪声的滤波算法。该算法选取滤波窗口内非噪声点的中值作为灰度区间选择的中心,然后,采用选定区间内非噪声点作为比较序列和参考序列计算关联系数,将关联系数作为区间各像素点的加权值,将加权值替换中心噪声点的像素值。实验结果表明,该算法对受不同程度污染的椒盐噪声图像在去噪性能及图像细节保护两方面具有较为理想的性能。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
集装箱化(2021年1期)2021-04-12
少年文艺·开心阅读作文(2020年4期)2020-03-28
中国信息技术教育(2020年2期)2020-02-02
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
科技视界(2018年3期)2018-04-02
饮食科学(2014年5期)2014-06-18
英语学习·阳光英语(2013年2期)2013-07-04
