基于虚拟现实技术的产钳操作模拟训练系统的研究和设计
2019-04-22 07:16李力唐昊霞
科技与创新 2019年7期
李力,唐昊霞
基于虚拟现实技术的产钳操作模拟训练系统的研究和设计
李力,唐昊霞
(湖南工业职业技术学院,湖南 长沙 410208)
针对当前产钳助产培训手段落后、效率低下的问题,提出了一种产妇分娩过程中产钳使用技术的培训、评估手段及其模拟系统。此系统基于虚拟现实技术,结合了产科技术和计算机图像处理技术,是一套兼具高科技和高成效的产钳模拟操作系统及评价方法。
产钳;助产;模拟训练;虚拟现实
现阶段,医科院校及医院在训练产科医生的产钳操作技术时主要利用产妇盆腔模型,而这种传统的训练方式,在评估标准和反馈途径上不够精确,在教学和培训效果上也是不尽人意的。因此,产科学界急需一种能提高产科医生产钳术的培训手段。本文提出的产妇分娩过程中产钳使用技术的培训、评估手段及其模拟系统,将现代高度发展的计算机技术应用到产钳术的培训中,改变了传统的、低效的产钳术培训方式。
1 系统硬件组成
在临床应用中,使用产钳助产时需要将产钳置入产妇体内,因此,助产者只能通过积累的经验估计产钳所到达的婴儿头部的位置,也难以恰如其分掌握产钳牵引力道。为解决产钳操作培训中遇到的上述问题,本文提出一种产妇分娩过程中产钳使用技术的培训、评估手段及其模拟系统。本系统采用基于计算机的三维可视化技术,可以在显示设备上从多个角度指示和观察产钳在产妇体内的实时姿态和位置,操作者通过画面反馈从而对钳叶的位置和力度进行修正,通过产钳给胎头施加一个与产妇产力同频同步的牵引力来达到助产的目的。本系统由高性能计算机及显示器、产妇骨盆模型及婴儿模型、数据采集传感器、产钳以及胎头驱动机构5大部分组成,系统组成框架如图1所示。
本系统中,在产钳的钳叶片前段安装了压力传感器,用于检测助产时产钳对胎头施加的压力以及产钳的位姿;在产钳的钳叶片把手端安装了三维空间跟踪器探头,用于检测产钳叶片的空间位置及产钳姿态。如图2所示,压力传感器21设置于产钳叶前段内侧处,三维空间跟踪器探头22位于钳叶把手端。婴儿系统机械连接结构如图3所示。31为胎头,由医学模型组成;32为胎头位姿检测探头,它为三维空间跟踪定位器的一部分,用于实时检测胎头的位姿数据;33为拉力传感器,用于检测在助产过程中产钳施加在胎头上的牵引力;多自由度机械关节34支撑胎头与驱动轴的连接,使得胎头模型在移动过程中能以关节中心点为原点进行任意方向的活动;柔性管35套接在前述多自由度机械关节上,起支承胎头作用;36为传动杆,传递动力源的驱动力;37为驱动动力源,可为电机或者气动液动机构。

图1 系统结构框图
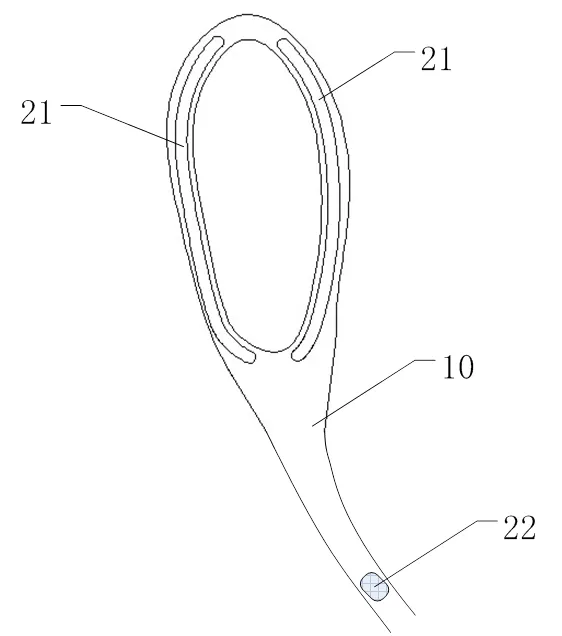
图2 产钳传感器布局示意图
产妇系统与胎儿系统结构布局如图4所示。41为产妇盆腔模型,是产妇系统的基础,采用医学助产模型;柔性橡胶气囊42设置在产妇盆腔及产道两侧,用于模拟产妇的盆腔及产道肌肉。

图3 婴儿系统连接结构图

图4 产妇系统与胎儿系统结构布局图
本系统的电气结构如图5所示。高性能计算机系统负责整个系统的控制以及人机交互,是整个模拟器系统的核心。三维空间跟踪定位器由机盒以及传感探头组成,传感探头把收集到的产钳和胎头位姿信号传送至主机盒,再由主机盒将信号处理后通过串口发送至计算机系统。下位机控制器为单片机系统,可直接通过串口与计算机系统连接,用于处理和传送产钳夹紧力及牵引力的传感器数据,同时负责执行计算机系统发出的驱动机构驱动指令。

图5 系统电气结构图
2 系统软件组成
软件系统由数据采集模块、图形驱动模块、产妇骨盆及婴儿3D模型、数据信息显示模块、产钳操作技能训练模块、产钳操作技能考核模块、胎头驱动控制模块组成。软件系统结构如图6所示。

图6 系统软件结构图
3 系统工作原理
如上所述,本系统主要具有产钳钳叶放置技能的训练及评估和产钳助产过程中产钳操作技能的训练及评估两项功能。产钳钳叶放置技能训练及评估的工作原理:操作者将产钳拆分为左右两叶并将其充分润滑,然后根据产钳助产临床操作流程分别将左叶产钳和右叶产钳经产妇产道放置于抬头左右两侧并锁合锁扣。在此操作过程中,安装在钳叶上的三维空间跟踪定位器探头检测到钳叶的空间位置和姿态的变化,该数据被实时经由计算机系统的数据采集模块传送至虚拟3D图形驱动模块,计算机系统的图形引擎根据该数据来对虚拟场景中的3D钳叶模型进行位置和姿态的刷新,从而使虚拟场景中的产钳模型与操作者操作的真实产钳进行同步动作。在计算机的显示端,采用基于虚拟现实的多视窗显示技术从多个角度对产妇骨盆及胎头进行监视,通过这项技术,操作者可以很直观地观察到钳叶在产妇产道内的位置及动作轨迹,计算机软件将同步记录此数据。在后期的训练中,可将新手的操作关键技能点数据与正确的钳叶放置位置和规范操作路径进行对比、评估,从而实现对新手操作的评估和考核。此外,从新手训练的角度出发,虚拟场景中还以图形或者文字的形式提供参考的钳叶移动路径和位置,初学者可根据相应提示进行练习,从而达到训练产钳钳叶放置技能的目的。
产钳牵引助产技能训练及评估的工作原理:在前述产钳钳叶放置正确并锁合锁扣后,再通过产钳助产协助产妇生产。产钳助产的基本原理:通过操作产钳给抬头施加一个牵引力来辅助产妇进行生产,该牵引力需要与产妇自身的产力同频同步,因此,产钳牵引助产技能的关键就在于准确把握产妇宫缩的频率。
本系统中,产妇宫缩力数据由医学临床采集或者计算机软件模拟产生,由胎头驱动装置来模拟真实临床情况下产妇在生产时的宫缩情况,并在显示设备上用曲线的方式来描述宫缩变化,初学者根据该曲线的变化规律在产妇宫缩时通过产钳向胎头施加一个同步的牵引力来达到助产的目的,位于胎头与驱动杆之间的力传感器实时检测该牵引力的大小并传送至系统的数据采集模块,计算机软件根据产钳施加的牵引力向胎头驱动机构输出指令驱动胎头产生相应移动,直至将胎头牵引至产科临床所需位置,从而完成助产过程。在此过程中,三维空间跟踪定位器获取的胎头以产钳的位姿数据被实时的传送至图形模块,从而驱动相对应的3D模型位置更新。在助产过程中,产妇的产力以及产钳施加的牵引力被显示在同一时间坐标系中,操作者可以由此来修正自己的动作以期达到训练目的。通过一定的评估算法来对比此牵引力与产妇产力,实现对操作者的考核评价。
4 总结
本文提出的产钳模拟操作系统及其评价方法基于虚拟现实技术,将计算机图形处理技术、机电控制技术应用到产钳操作技能培训中,能对产科临床产钳操作技能进行直观、科学的技术引导,进而能对产钳助产过程中的产钳使用技术进行科学准确评估,从而能够直观精确地帮助广大产科从业者快速高效掌握产钳助产技术,与传统的手把手教学、机械模型练习相比,提高了产钳术的培训效率和质量,更能促进产钳助产术的发展。
[1]陈刚,李力.一种产钳操作模拟训练器及其操作方法:中国,CN201210297090.6[P].2014-09-03.
[2]许运梅.改良式低位产钳术联合无保护会阴助产对母婴预后的影响[J].基层医学论坛,2018,22(29):4098-4099.
[3]包永华.基于VR技术的分析仪器虚拟维修拆装教学训练系统设计[J].现代食品,2017(24):7-10.
[4]芦甜.虚拟现实技术在室内设计教学中的应用研究[J].建材与装饰,2017(52):114-115.
[5]杨江涛.计算机虚拟现实关键技术研究[J].南方农机,2017,48(24):136.
[6]董浩,盖帅,高湛.基于虚拟现实的双臂机器人运动仿真系统研究[J].天津科技,2017,44(12):51-54,57.
[7]姜云兰.产钳在头位困难剖宫产术中的应用价值[J].中国妇幼保健,2017,32(23):5885-5887.
[8]曾晓明,欧阳安.双手旋转胎头纠正持续性枕横(后)位的临床观察[J].江西医药,2017,52(10):1040-1041.
[9]马卫星.阴道分娩产钳助产76例分析[J].世界最新医学信息文摘,2017,17(82):68-69.
[10]李容芳,徐燕媚,邓琼.新产程标准与助产措施对产钳助产、中转剖宫产和新生儿窒息发生率的影响[J].海南医学,2017,28(19):3227-3229.
[11]夏凤芹,纪彬彬.产钳助产术154例临床分析[J].世界最新医学信息文摘,2017,17(80):151-152.
[12]李莉.剖腹产术后再孕阴道分娩产钳助产的应用价值研究[J].临床医药文献电子杂志,2017,4(71):13919.
[13]李雯,刘明.大S拉钩及单叶产钳在剖宫产术中助娩胎头的对比分析[J].世界最新医学信息文摘,2017,17(67):54-55.
2095-6835(2019)07-0146-03
TP399
A
10.15913/j.cnki.kjycx.2019.07.146
李力(1983—),男,湖南长沙人,硕士研究生,讲师,主要研究方向为机电一体化技术、虚拟现实仿真技术。
〔编辑:严丽琴〕
猜你喜欢
中国典型病例大全(2022年13期)2022-05-10
中国应急管理科学(2022年1期)2022-04-18
当代医药论丛(2022年2期)2022-01-27
养猪(2021年1期)2021-02-22
环球时报(2020-04-09)2020-04-09
学习与科普(2019年12期)2019-09-10
科技创新与应用(2017年26期)2017-09-12
中国实用医药(2017年25期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19