一种嫦娥三号高程值的估计方法
2019-04-22 07:53周哲哲陈胜勇
西安电子科技大学学报 2019年2期
周哲哲,赵 萌,石 凡,陈胜勇,栾 昊
(1.天津理工大学 计算机科学与工程学院, 天津 300384;2.天津理工大学 计算机视觉与系统教育部重点实验室, 天津 300384)
2004年,中国正式启动了中国探测月球的第一步,并将其命名为嫦娥工程。其中,月球模型精确重建作为月球探测的关键性基础,受到了国内外学者的广泛关注。 2010年10月1日成功发射的嫦娥二号探测器,搭载了一台立体相机用于月球地表探测,可以实现前视和后视两个方向立体影像的获取,并获取了包含高程值信息的月球影像数据[1]。2013年12月14日,我国成功将嫦娥三号[2]探测器发射升空。嫦娥三号月球车对月球近月面进行了拍摄,传回了大量高清图像数据。
目前国内许多学者根据嫦娥一号和嫦娥二号数据,分别进行了全月重建和部分虹湾地区重建。对于嫦娥三号的研究多集中在着陆器和巡视器等方向,文献[3]在月球软着陆方面对着陆器进行了精确定位,具体介绍了着陆器的精确观测建模与统计定位方法。而国外的研究多集中在月球数字高程图(Digital Elevation Model, DEM)方向。文献[4]利用卷积神经网络来确定月球DEM中陨石坑的位置和大小的可行性。文献[5]提出由月球勘测轨道器上的激光测高仪构成DEM。文献[6]利用光度计的逐步算法(光电测量法)和激光测高计数据相结合来构建一个新的DEM,目的使其具有更少的缺陷和伪影。
相较于嫦娥二号,嫦娥三号月球图像清晰度高、特征明显,为高精度月球重建提供了基础。但由于其缺少激光高度计数据,重建更精确的全月三维模型成为了一个难题。为了解决上述问题,笔者提出了一种可实现高精度月球重建的新思路,充分利用嫦娥三号图像高清及嫦娥二号信息全面的特点,结合误差反向传播(error Back Propagation, BP)神经网络[7]的预测性能,构建了一个嫦娥三号高程值估计模型。具体方法是,首先利用尺度不变特征转换(Scale-Invariant Feature Transform, SIFT)[8-10]算法提取嫦娥二号的月球图像匹配点;然后采用前方交会算法计算月球的月面坐标系下的高程值,通过得到的左右图像的同名像点及其高程值作为输入值进行训练BP神经网络;最后,根据嫦娥三号的电荷耦合器(Charge-Coapled Device, CCD)中的图像特征对其高程值进行估计。
1 文中算法
相较于嫦娥一号和嫦娥二号探测器,嫦娥三号缺少激光高度计,无法直接获得对应月球点的高程值信息。但嫦娥三号拍摄的是近月的地表图像,清晰度较高,特征十分明显,可以准确地提取和匹配双目图像的特征。文中首先利用SIFT算法来实现嫦娥二号月球图像匹配点的提取和匹配,然后将双目图像的左右图的位置坐标也作为特征进行融合,并且通过层次聚类[11-13]的方法将离群点去除掉,最后得到的特征词典可作为BP神经网络模型的训练数据。根据嫦娥三号获得的数据输入训练完成的网络,实现嫦娥三号高程值的预测。将获得的预测值与同一区域的嫦娥二号高程值进行比较,最后得到误差均值。文中算法的整体流程如图1所示。
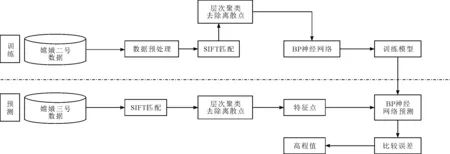
图1 嫦娥三号月球高程值预测
文中给出两轨相同区域的数据,包括嫦娥二号0 891轨的前后视图与嫦娥三号039轨的前后视图。将获得的嫦娥二号3 650组数据,经预处理后,剔除578组离群点后,将前2 048组数据进行训练,形成训练模型;然后在剩余1 024组中每次随机抽取600组数据测试,重复10次,以验证该方法的有效性。在嫦娥三号数据中,获得了1 650组数据,可进行高程值预测与精确度估计。
1.1 SIFT算法提取月球图像匹配点
首先利用嫦娥二号设备的图像信息与高程值信息,用SIFT算法对嫦娥二号CCD相机获取的前后视图像进行特征点匹配。文中SIFT提取月球图像特征的主要步骤包括:
步骤1 在输入的月球图像上构建尺度空间。即在月球图像上以每个特征点为中心,建立一个区域统计梯度直方图。
步骤2 检测多尺度空间极值点。利用图像在高斯差分空间进行极值点检测,得到特征点、几何位置和相应尺度信息。
步骤3 给特征点赋值一个128维方向参数,其中包括每个特征点上划分16个子域,每个子域统计出8个方向的梯度直方图。
步骤4 生成特征点描述子。
步骤5 特征点匹配。通过计算两个特征点的SIFT描述符之间的欧式距离作为SIFT特征点的相似度度量。找出某个特征点描述符欧式距离最近和次近的两个特征点。如果最近的距离d0与次近的距离d1的比值r=d0/d1小于阈值Tr,则该特征点与候选点距离最近的特征点匹配。
该算法中对嫦娥二号数据提取了大量的匹配点(3 650组),对嫦娥三号数据提取了1 650组匹配点,每组是128维特征向量,用于后续的工作。
1.2 匹配点坐标特征与SIFT特征融合
月球近地表的高程值不仅与SIFT算子提取的匹配点有关,也与其左右图的特征点坐标有关。故需要将双目图像的匹配点特征进行预处理:①将月球左右图的匹配点的融合;②将融合后的左右匹配点所对应坐标值的融合。
左右图匹配点特征的计算公式可表示为
(1)
其中,fl代表左图的匹配点128维特征向量,fr代表右图的匹配点128维特征向量,flr代表对左右图匹配点SIFT描述子运算后的特征向量。这里flr依然是128维。在匹配点融合后,得到(x1,y1)为月球左图匹配点坐标,(xr,yr)为右图匹配点坐标,则有融合坐标特征后的132维特征f可表示为
f=[xl,yl,xr,yr|flr] 。
(2)
1.3 离群点去除与特征降维处理
由于月球图像像素高,获得的特征匹配点较多,存在很多的误匹配点或特征表示较差的点,文中利用层次聚类的方法去除一部分离群点,以确保高程信息学习训练的准确性,提高整体算法的精确度。具体步骤如下:
环偶极子以其独特的电磁特性与太赫兹波相结合,在太赫兹透明材料、吸波器、滤波器等功能器件上应用广泛。本文所提出的平面型太赫兹环偶极子超材料为环偶极子的后续研究提供了实验基础,为柔性环偶极子超材料的研究提供了一种新的思路。
步骤1 将每一个匹配点归为一类,以嫦娥二号为例,能够得到3 650类,每类仅包含1个对象。类与类之间的欧式距离是它们所包含的对象之间的距离。其中,两个132维向量a(x11,x12,…,x1n)与b(x11,x12,…,x1n)之间的欧式距离d12可表示为
步骤2 找到最接近的两个类合并成一个类,于是总的类数少了一个。
步骤3 重复计算新的类与所有旧类之间的距离。
步骤4 重复步骤2和步骤3,直到最后合并成一个类为止。
将去除离群点后的数据进行降维处理,可以有效地减少整个算法的复杂度,并且可以保证精确度。文中使用了主成分分析(Principal Component Analysis,PCA)[14]进行降维处理。将SIFT特征和坐标数据融合后的新特征向量进行主成分分析,在高维空间以计算马氏距离为标准,当部分特征达到95.5%的替代率时即可。文中通过实验选取73维特征数据代替132维特征。
1.4 月球高程值估计模型
利用嫦娥二号训练BP神经网络模型,验证模型的有效性。将嫦娥二号的匹配点中的离群点剔除后的数据分为训练组与测试组训练模型,使用嫦娥三号数据利用模型进行估计。


图2 文中5层BP神经网络结构
图2中输入层n为73个神经元,隐含层m有13个神经元,输出层是一维数值,即高程值。通过多次参数调试,选取了最佳的参数,规避了BP神经网络易出现的局部最优的问题。
经过实验后,得到嫦娥三号的数据有1 650组,用训练好的BP神经网络模型对嫦娥三号数据进行高程值估计。估计结果与对应相同经纬度地理位置的嫦娥二号高程值进行误差结果分析。
2 实验结果
所有实验的运行环境为3.2GHz,Intel Core i5 CPU,8GB RAM和Matlab2016。
经过SIFT匹配之后,得到嫦娥二号匹配点3 650组,经过离群点剔除剩余3 072组,嫦娥三号匹配点1 650组,同时得到每个匹配点128维的SIFT特征,此特征与坐标点进行融合,得到132维特征,再经过PCA降维,最终得到73维特征。将此特征作为BP神经网络的输入,高程值作为神经网络的输出。以嫦娥二号5组匹配点特征及高程值为例,其数据形式如表1所示。
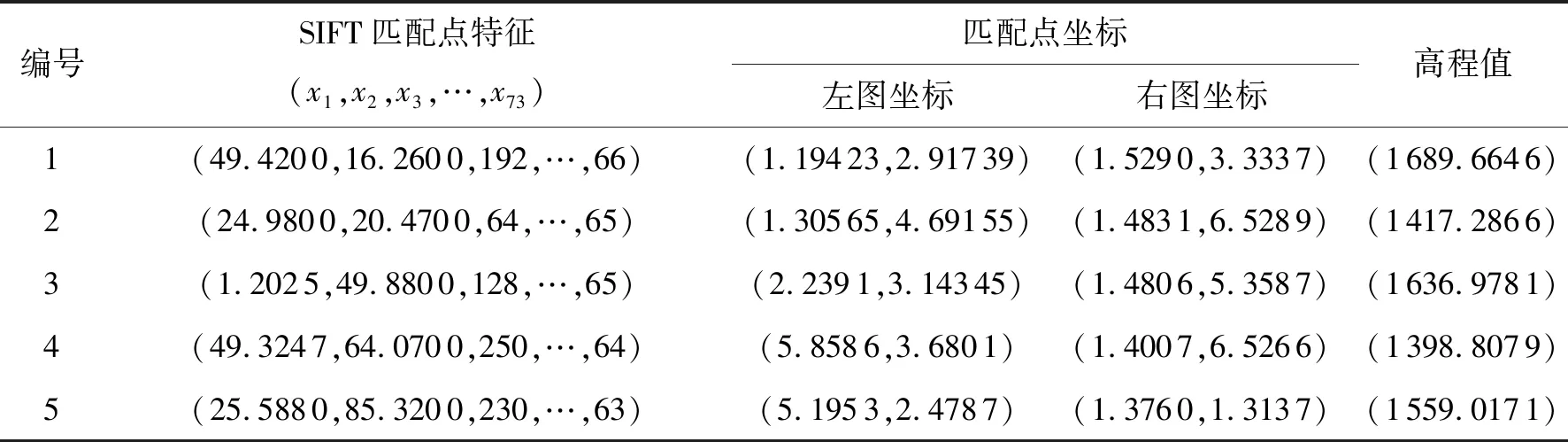
表1 嫦娥二号匹配点特征、坐标值及预测高程值

(3)

对上述获得的3 650组匹配点进行两次层次聚类,两次层次聚类将所有匹配点分为50层,共剔除了578个离群点,并在剩余的3 072组特征匹配点中,选取前2 048组匹配点作为训练数据进行模型训练。BP神经网络为5层,隐含层每层节点数为13个,本实验设置数据显示刷新频率为50,训练次数为1 500,训练目标误差为0.001,学习速率为0.01。在剩余1 024组匹配点中随机抽取600组作为测试数据,重复10次,得到的测试结果如图3所示,证明了该模型的有效性。然后将训练好的模型进行嫦娥三号高程值估计。在嫦娥三号中获得1 650个匹配点,得到相对误差值,如图4所示。
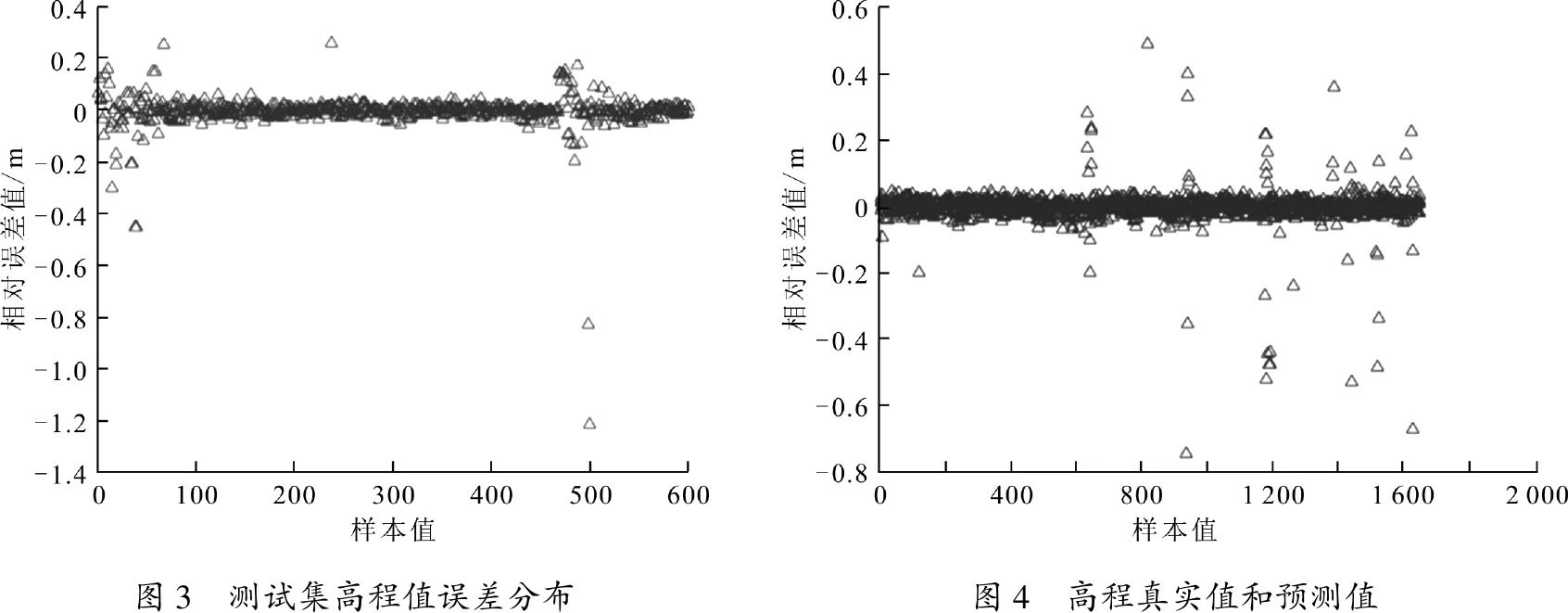
图3 测试集高程值误差分布图4 高程真实值和预测值
加速稳健特征(Speed Up Robust Feature, SURF)是一种经典的、常用的稳健局部特征点检测和描述算法,将文中算法与以下两组经典算法进行实验对比,其中一组为SURF算法结合BP神经网络算法,另一组为SIFT算法结合BP神经网络算法。实验结果表明,文中提出的分层聚类结合SIFT算法和BP算法的结果最佳。表2给出了3组实验的最低误差及运行时间。
文中充分利用嫦娥三号拍摄到的月球近月面的高分辨率的地表图像,实现双目特征提取与匹配,进行匹配点特征及高程值的训练和预测。实验结果显示,通过BP神经网络算法估计的高程值准确度高、速度快。将训练好的模型应用于其他的嫦娥三号图像,便可快速获得其高程信息,可以更准确、迅速地还原月球近月面的地形地貌,进而实现全月的精确重建有较大的优势。
3 结束语
文中针对嫦娥三号月球图像高清晰度、特征点明显,但缺乏高度信息的情况,引入嫦娥二号立体相机图像信息和激光高度计数据,结合分层聚类、SIFT特征描述子提取和BP神经网络方法,有效提高了嫦娥三号高程值预测准确率问题。文中所提出的算法使月球遥感图像结合机器学习算法相结合,可以快速地批量学习图像特征及其对应的高程信息,能较为准确地获得月球的全月高程值,为进一步获得月球的全月模型打下基础。
猜你喜欢
学与玩(2022年6期)2022-10-28
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
全球定位系统(2015年4期)2015-02-28
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10
太空探索(2014年1期)2014-07-10