后装机源缆传送机构的改进设计及精度研究
2019-06-12 03:58杨志永谢贤诗李思远
天津大学学报(自然科学与工程技术版) 2019年9期
杨志永,谢贤诗,李思远,姜 杉
后装机源缆传送机构的改进设计及精度研究
杨志永,谢贤诗,李思远,姜 杉
(天津大学机械工程学院,天津 300350)
本文旨在改善近距离后装式放射治疗机在使用过程中易出现的放射源卡源的问题,同时为了提高后装治疗机放射源的源到位精度,针对后装放射治疗机的关键治疗机构——源缆传送机构,进行了结构改进设计.首先,针对机构中的关键零部件绕丝轮的槽形进行了改进设计,经过对比分析,选用三角形槽的设计方案,并通过计算60°夹角的三角槽对源缆的摩擦驱动力,证明三角形槽能够提供足够的摩擦驱动力.基于以上所做出的改进,实现了源缆传送机构中片基带对源缆的完全包覆,保证了源缆在出丝和收丝的过程中不出现乱丝的问题;其次,对源缆传送机构的弹簧张紧力进行了设计与计算,通过摩擦传动受力模型计算出张紧弹簧的最小张紧力值,确定了片基带与绕丝轮之间不出现滑移的条件;再次,设计了一种浮动导向管用于辅助源缆的出丝、收丝过程,分析了浮动导向管对提高源到位精度的影响;最后,基于电磁定位仪、光纤传感器以及直线导轨等元器件,创新搭建验证改进结果的实验平台,通过设置使用不同的弹簧张紧力、绕丝轮槽形以及浮动导向管的实验组别,进行对照实验.实验得到的数据显示,改进后的后装治疗机的源到位精度得到了提升,其精度为≤±0.6mm,同时,后装治疗机出丝、收丝过程中的卡源现象显著减少.
后装治疗机;源到位精度;源缆传送机构;绕丝轮
近距离放射治疗配合手术治疗以及药物治疗,在癌症治疗方面能起到显著临床疗效[1].内放疗作为当前的主要放射治疗手段之一,是把放射源输送到人体自然管腔或者植入到肿瘤内部,以此起到放射治疗作用的方法[2].近距离后装治疗机(后装机)就是用于腔内放疗的机器,该机器的治疗原理是通过人体的自然管腔或组织间插植导管,将放射源输送至病灶处,继而依靠放射源192Ir衰变产生的高能γ射线对病人肿瘤靶区进行短时近距离放射治疗,起到消灭肿瘤细胞的作用[3].在后装机的临床应用中,备受医学界关注的是如何避免放射源在后装机中出现故障卡住的问题(称之为卡源),以及后装机的放射源到位精度.卡源,即在后装机运行时,放射源在输送或返回过程中出现运动停滞,不能正确运行到治疗计划中的安全位置,发生医疗事故[4].而放射源的到位精度决定了后装机对肿瘤的治疗效果,若放射源在病区停留的位置与治疗计划所设定的位置出入较大,则不能达到预期的治疗效果.当前,临床上对后装机的源到位精度要求为≤±1mm[5].本课题组已完成了后装样机的制作,样机的源到位精度及卡源问题仍有待改善[6-7].笔者针对后装机的关键机构——源缆传送机构进行了改进,改善卡源情况,提高了源到位精度,并进行了相应的精度测试实验.
1 后装机的工作原理
后装机工作原理如图1所示.放射源步进电机和模拟源步进电机上各有一个绕丝轮,轮上绕有放射源缆和模拟源缆.在放射源缆的末端焊有微型放射源192Ir.绕丝轮的步进电机带动绕丝轮的旋转,驱动微型源穿过“Y”导管,通过分度头的指定通道,在放置于人体内的治疗导管或者施源器中行进和驻留,进行照射,起到杀死病区肿瘤细胞的作用.由于所用放射源具有的高剂量近距离的治疗特点,即放射源的照射剂量大小与治疗位置和放射源中心的距离有关,距离较小时,照射剂量较大,但随着距离的增长,剂量较快衰减[8].源缆传送机构需要具备的功能是能够准确驱动柔性源缆并使其精确到位.
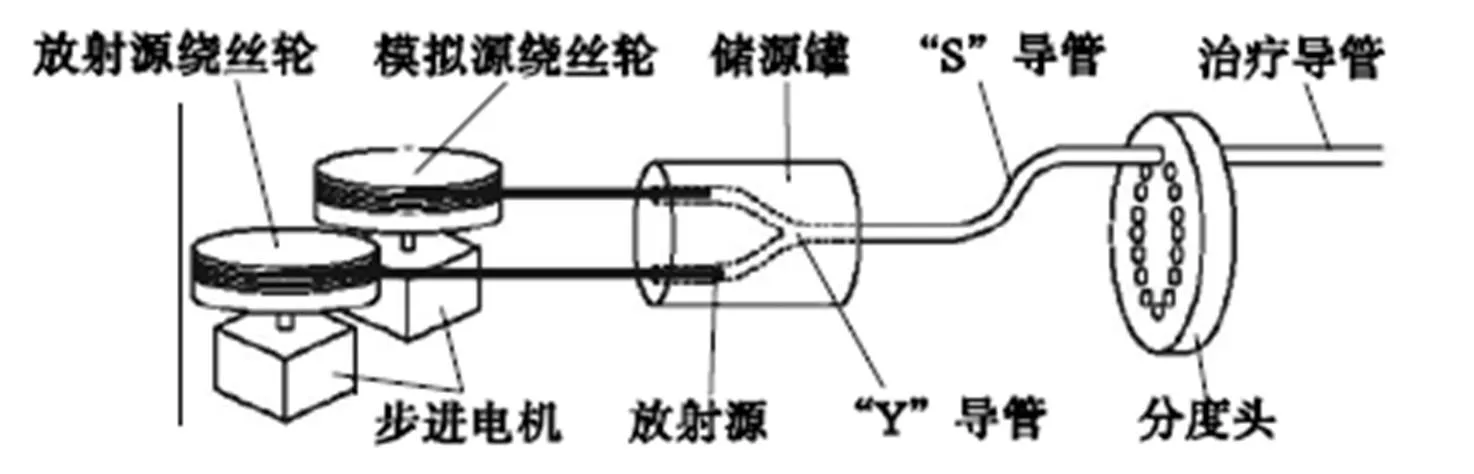
图1 后装机工作原理
2 源缆传送机构的设计
本文中,源缆传送机构采用张紧带摩擦驱动源缆的设计方案.源缆传送机构的具体结构为:机构上装有4组导轮,这些导轮固定着片基带,将其中一个导轮进行偏心安装.通过调整张紧弹簧的预紧圈数,实现该导轮与绕丝轮相对位置的调整,从而张紧片基带.片基带包裹着绕丝轮,使得缠绕在绕丝轮上的源缆紧密贴合在轮的螺旋槽壁上.驱动步进电机,绕丝轮旋转,带动片基带运动.模拟源与放射源驱动部分的结构是对称的,单侧源缆传送机构的具体情况如图2所示.
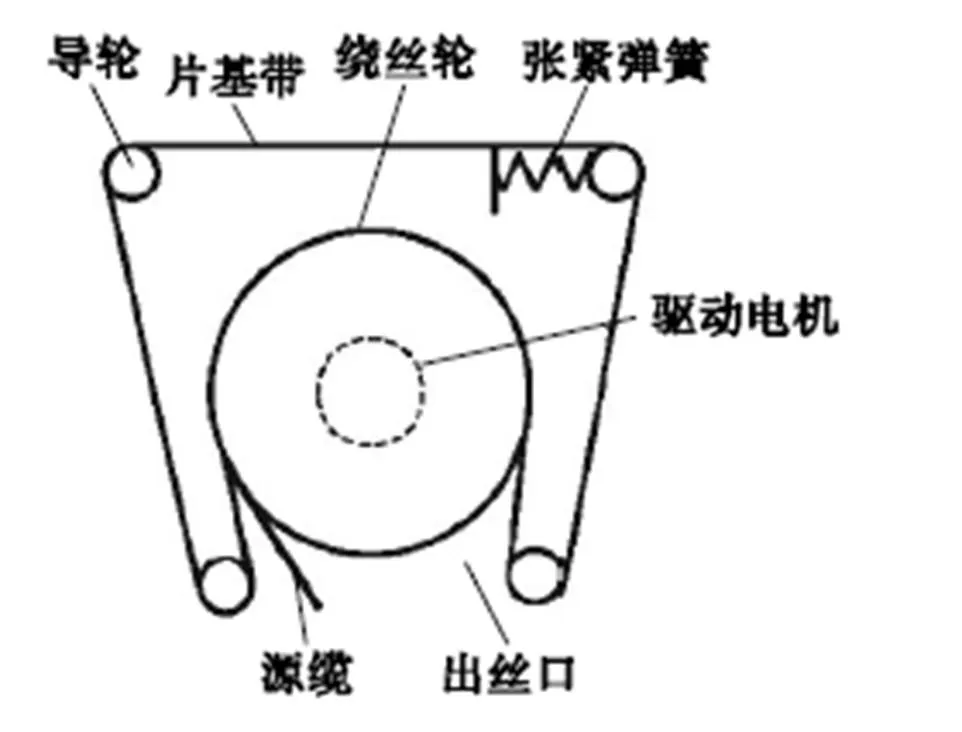
图2 槽轮摩擦传送机构
2.1 绕丝轮槽形的设计及分析
2.1.1 槽形设计
为增加源缆传送机构的可靠性,笔者设计了一种新型绕丝轮槽形,如图4所示.在收丝过程中,三角形槽为源缆回归槽内提供了一个更大的开口空间,同时槽的倾斜壁面使得源缆在收丝回归槽内时,有一种滑入槽内的趋势.
图3 半圆形槽绕丝轮与片基带配合

图4 三角形槽绕丝轮与片基带配合
2.1.2 三角形槽参数设计

设定源缆与片基带之间的摩擦系数为1,源缆与槽之间的摩擦系数为2,则根据图5可得

(1)

(2)

(3)

(4)
片基带的包裹力给定后,1保持不变.由式(1)、(3)、(4)可以看出,随着的减小,3和4逐渐增大,故绕丝轮带动源缆前进的驱动力3和4也逐渐增大,有利于源缆的传送更精确.但是若过小,槽的深度将会过大,致使绕丝轮的直径过大.
选定=60°,则3=4=1,1=11,3=4=21.查表得,1=0.3,2=0.18.因此

(5)

(6)
式中1是片基带对源缆的摩擦力.由式(5)和(6)可以看出,此时半圆槽壁面无法为源缆提供克服来自片基带摩擦阻力的摩擦驱动力,而=60°的三角槽壁面为源缆提供的驱动摩擦力要大于源缆受到来自片基带的摩擦阻力,源缆能够顺利传送.
2.2 源缆传送机构张紧力计算
槽轮摩擦传送机构运行时,依靠绕丝轮与片基带之间的摩擦力,将轮与带有机地联系起来,以实现二者间的同步运动.由于片基带存在黏弹性,在源缆传送机构正常运转、启动和制动时,片基带在绕丝轮上经常会发生打滑现象.为了保证机构的正常运转,通过张紧弹簧向片基带施加张紧力,确保源缆传送的精确性.启动、制动时的张紧力一般应为正常运行时的1.2~1.6倍,若此时张紧力太小,容易使片基带打滑,源缆传送精度下降,需要较大的张紧力以增大片基带和绕丝轮的摩擦力,从而使片基带在启动时有足够大的启动加速度.若片基带的张紧力太大,则需要提高片基带的强度,同时增大绕丝轮的直径[9-10].因此,确定合理的片基带张紧力对于提高源缆传送机构的精度是十分关键的.该机构的摩擦传动原理如图6所示.

图6 摩擦传动原理
设绕丝轮此时的输出牵引力为u,片基带在与绕丝轮即将分离点处,其张紧力为1,在即将相遇点处,其张紧力为2(2≥1).为片基带在绕丝轮上所对应的围包角,在片基带包弧段上选取微弧段作为研究对象,段所对应的围包角为d,其受力分析如图6所示.
由微弧段力的平衡可得

(7)

(8)
式中:和+d分别为片基带在点和点的张力;3为绕丝轮与片基带之间的摩擦系数;d为微弧段所受的法向反力.
将式(7)和(8)联立解方程,由于d很小,可以认为sin(d/2)=d/2,cos(d/2)=1,得

(9)

(10)
忽略式(9)中的二次微量项d(d/2),得

(11)
两边同时积分,可得

(12)
式中是常数.由边界条件(=0)=1,得

(13)
由式(13)可知随着增大而增大,所以在绕丝轮包弧段上,2为片基带最大张紧力,此时,=,

(14)
绕丝轮输出的圆周牵引力u是通过摩擦传递到片基带上的(见图6),为保证片基带运转时不打滑,需保证1的最小值满足下列条件[10]:

(15)
式中umax为源缆传送机构启动或制动时出现的最大圆周牵引力.
因此,张紧弹簧需要提供的张紧力[11]为

(16)
2.3 浮动导向管的设计
为保证源缆传送机构准确将源缆输送到“Y”导管中,在图2所示的出丝口与“Y”导管入口之间设置了一种浮动导向管,其作用是约束源缆的前进方向,使得源缆只能够沿着设定的方向准确进入“Y”导管.浮动导向管的工作原理如图7所示.该装置与源缆传送机构的配合关系如图8所示.

图7 浮动导向管工作原理
图8 浮动导向管空间装配

(17)
式中:是浮动导向管的长度;是绕丝轮上出丝最高点与点在竖直方向上的距离.
在这种情况下,源到位精度的误差=Δ,要远大于临床上≤±1mm的要求.
为改善这一偏差对后装机源到位精度的影响,笔者对浮动导向管和绕丝轮的结构进行了改进,目的在于使浮动导向管随着绕丝轮的转动进行同步的精确运动.为此,笔者在浮动导向管的右端添加了一段钢丝,如图9所示.同时,在绕丝轮原有的槽形设计上增加了螺旋定位槽,具体的改进措施如图10所示.装配时,将浮动导向管右端处的钢丝放置于绕丝轮的定位槽中,当绕丝轮转动时,位于定位槽中的钢丝将驱动浮动导向管跟随着绕丝轮的转动而同步上下浮动.因此,导向管右端的通道口将始终位于当前源缆所在的槽位的高度,使得出丝和收丝过程中,导向管不再出现下垂的现象,故能够始终维持源缆在正确的传输轨迹上,消除了Δ带来的影响,保证了后装机的源到位精度.
图9 浮动导向管的改进设计
图10 绕丝轮槽形的改进设计
3 改进效果验证实验
3.1 精度实验方法及装置
现阶段所采用的验证后装机源到位精度的方法有直接测量法[12]、胶片法[13]以及电离室法[14]等.鉴于直接测量法在读数时是基于人眼读数,容易产生误差,同时,胶片法和电离室法成本较高,故在实验室条件下设计了一套用于测量后装机源到位精度的实验装置,其原理如图11所示.
图11 到位精度实验原理
后装机出丝,丝在透明导管中前进.透明导管固定在刻度尺上保持直线状态.导轨上安放有光纤传感器的探头以及电磁定位仪的传感器,用于反馈丝的行进距离.PLC控制器中的程序实现的功能是驱动导轨带动光纤探头以及电磁探头的启动、停止和前进、后退.初始时刻,导轨处于静止状态,将丝的末端与光纤探头中心调至平齐,此时位置为出丝零点.后装机出丝一段距离,光纤探头检测到丝,反馈一个高电平给PLC,PLC驱动直线导轨前进,由于丝的行进速度大于导轨运行速度,所以丝先停止运动,然后光纤探头再次检测到丝的末端,反馈一个低电平给PLC,使得导轨停止运动.在两次分别静止的时候,电磁定位仪通过电磁探头检测到对应的两个坐标,通过两个坐标可以计算出丝的前进距离,将多组计算所得值与设定的丝的前进距离进行比较,即可获得源到位精度.搭建的实验平台如图12所示.
3.2 精度实验数据采集系统
本文中所采用的数据采集系统由光纤传感器E3X-DA21F、电磁定位仪3D Guidance trakSTAR以及电磁定位仪配套软件Ascension组成的.电磁探头采集到丝末端的坐标数据,传给电磁定位仪,继而传给计算机.该电磁定位仪的精度是0.01mm.E3X-DA21F的动作响应时间是46μs,导轨的速度为2mm/s,故在光纤传感器检测到丝的末端并且反馈信号制动导轨的过程中,导轨前进距离理论上仅为0.92nm,对坐标采集的影响可以忽略不计,因此采集到的坐标数据可以表示丝的真实前进距离.
图12 实验平台
3.3 精度验证实验及数据处理
本文中后装样机所使用的治疗导管长度为1000mm,配合使用的宫颈癌施源器的宫腔管长度为330mm,宫腔管头部的壁厚为1mm.故最大出丝距离=1329mm.实验分为以下组别.
(1)实验a.弹簧张紧力=30N,分别验证在是否使用带有定位结构的浮动导向管情况下,槽形在改进前和改进后的后装样机的源到位精度.使用不带定位结构的导向管:半圆形槽绕丝轮(a-1),=60°的三角形槽绕丝轮(a-2);使用带定位结构的导向管:半圆形槽绕丝轮(a-3),=60°的三角形槽绕丝轮 (a-4).
(2)实验b.弹簧张紧力=41N,分别验证在是否使用带有定位钢丝的浮动导向管情况下,槽形在改进前和改进后的后装样机的源到位精度.使用不带定位钢丝的导向管:半圆形槽绕丝轮(b-1),=60°的三角形槽绕丝轮(b-2);使用带定位钢丝的导向管:半圆形槽绕丝轮(b-3),=60°的三角形槽绕丝轮 (b-4).
(3)实验c.弹簧张紧力=50N,分别验证在是否使用带有定位钢丝的浮动导向管情况下,槽形在改进前和改进后的后装样机的源到位精度.使用不带定位钢丝的导向管:半圆形槽绕丝轮(c-1),=60°的三角形槽绕丝轮(c-2);带定位钢丝的导向管:半圆形槽绕丝轮(c-3),=60°的三角形槽绕丝轮(c-4).
每次操作后装样机以最大出丝距离出丝10次,将10个计算所得值的平均值作为样机本次最大出丝距离的真实值r.每组实验中,操作后装样机以最大出丝距离出丝100次,计算获得10个r,定义出丝距离误差Δ=|-r|,以此分析本文中后装样机的源到位精度.
实验所得数据如表1所示.表1中所得数据已剔除发生卡源时候产生的数据,并且补齐实验次数.出丝距离误差及标准差直方图如图13所示.
表1 出丝距离误差数据

Tab.1 Cable feeding distance error data
3.4 卡源次数统计实验及数据处理
重复精度验证实验中的步骤.不同点在于:在卡源次数统计实验中,保留了卡源情况下的实验结果,实验中所得的卡源次数如表2所示.

图13 出丝距离误差及标准差直方图
表2 卡源次数统计

Tab.2 Number statistics of source sticking
4 实验数据分析
在分别考虑3个影响因素,即张紧弹簧张紧力、浮动导向管以及绕丝槽形的情况下,进行了精度验证实验.将出丝距离误差值视为源到位精度.由表1和图13可以看出,在不使用带有定位钢丝的浮动导向管时,出丝距离误差值较大,且变化范围大,不稳定.原因在于没有定位钢丝的浮动导向管在源缆传输过程中,出现下垂现象.而在使用带有定位钢丝的浮动导向管时,误差值要明显小于前者且呈现较稳定的状态,这是由于定位钢丝的存在使得导向管不再出现下垂的现象,从而大大减小了误差值.同时,在使用带有定位钢丝的导向管的基础上,使用=60°三角形槽绕丝轮的出丝距离误差小于使用半圆形槽绕丝轮时产生的误差.另外,当张紧弹簧张紧力<min,源到位精度不能满足≤±1mm的设计要求;而当≥min,源到位精度符合要求,达到≤±0.6mm,并且此时的增大对于提高精度无明显影响.
在分别考虑3个影响因素,即张紧弹簧张紧力、浮动导向管以及绕丝槽形的情况下,进行了卡源次数统计实验.表2数据表明,在使用带有定位钢丝的浮动导向管情况下,后装机卡源次数减少.此外,张紧力也是发生卡源的重要因素之一.当张紧弹簧张紧力<min,使用带定位钢丝的浮动导向管也不能有效减少卡源次数;而当≥min,配合使用带有定位钢丝的浮动导向管,卡源次数显著减少,并且此时的增大对于减少卡源次数无明显影响.同时,相较之下,使用三角形槽也能有效减少卡源的发生.
5 结 语
对后装治疗机的源缆传送机构进行了改进设计,设计了一种新的三角形槽绕丝轮以及浮动导向管,计算了最优的弹簧张紧力,使得出丝收丝的精确性得到提高,改善了卡源的情况.通过源到位精度实验,验证了使用最优张紧力、三角形槽绕丝轮以及新型浮动导向管提高了该后装治疗机的源到位精度,达到了 ≤±0.6mm,并且大幅度地减少了卡源现象的发生.经过分析,仍还有卡源现象发生的原因在于送丝过程中,源缆的头部在分度头处受到了阻碍,后续可通过设计更有助于源缆顺利通过分度头的用于连接治疗导管与分度头的机构,来进一步改善卡源现象.
[1] 程 杭. CT引导下食管癌高剂量率腔内后装放疗的剂量学研究[D]. 北京:清华大学医学院,2014.
Cheng Hang. Dosimetric Study of CT-Guided High Dose Rate Endoluminal Radiotherapy for Esophageal Cancer[D]. Beijing:Medical School,Tsinghua University,2014(in Chinese).
[2] Awunor O,Berger D,Kirisits C. A multicenter study to quantify systematic variations and associated uncertainties in source positioning with commonly used HDR afterloaders and ring applicators for the treatment of cervical carcinomas[J]. Med Phys,2015,42(8):4472-4483.
[3] El Gamal I,Cojocaru C,Mainegra-Hing E,et al. The fricke dosimeter as an absorbed dose to water primary standard for Ir-192 brachytherapy[J]. Phys Med Biol,2015,60(11):4481-4495.
[4] 黄永祥,李怀安,赵保民. 高剂量后装治疗机卡源原因及受照剂量分析[J]. 医疗装备,2000(8):58-59.
Huang Yongxiang,Li Huai’an,Zhao Baomin. Causes of high dose rate afterloader source sticking and analysis of exposure dose[J]. Medical Equipments,2000(8):58-59(in Chinese).
[5] De Werd L A,Jursinic P,Kitchen R,et al. Quality assurance tool for high dose rate brachytherapy[J]. Med Phys,1995,22(4):435-440.
[6] 李思远. 高剂量率后装放射治疗机结构设计及控制系统研究[D]. 天津:天津大学机械工程学院,2017.
Li Siyuan. Research on Structure Design and Control System of High Dose Rate Afterloader for Radiotherapy [D]. Tianjin:School of Mechanical Engineering,Tianjin University,2017(in Chinese).
[7] 方贤春. 近距离后装放射治疗机器人结构设计与控制系统研究[D]. 天津:天津大学机械工程学院,2014.
Fang Xianchun. Research on Design and Control System of Afterloading Robot for Brachytherapy[D]. Tianjin:School of Machanical Engineering,Tianjin University,2014(in Chinese).
[8] Rivard M J,Coursey B M,de Werd L A,et al. Update of AAPM task group No.43 report:A revised AAPM protocol for brachytherapy dose calculations[J]. Med Phys,2004,31(3):633-674.
[9] Zhang S,Xia X. Modeling and energy efficiency optimization of belt conveyors[J]. Appl Energ,2011,88(9):3061-3071.
[10] 吴春信,薛本峰. 带式输送机输送带的张紧与张紧装置[J]. 煤矿机械,2004(8):91-93.
Wu Chunxin,Xue Benfeng. Tensioning and tensioning device for belt conveyor[J]. Coal Mine Machinery,2004(8):91-93(in Chinese).
[11] 王爱芳,刘训涛,刘秀莲,等. 带式输送机输送带的张紧力分析、计算及张紧装置的选取[J]. 煤矿机械,2013(8):176-178.
Wang Aifang,Liu Xuntao,Liu Xiulian,et al. Analysis and calculation of tension force for belt conveyor belt and selection of tensioning device[J]. Coal Mine Machinery,2013(8):176-178(in Chinese).
[12] 倪玲琴,刘艳梅,徐彩霞. RL_HZJ18型后装机出源长度的测量[J]. 医疗卫生装备,2009,30(4):64-65.
Ni Lingqin,Liu Yanmei,Xu Caixia. Measurement of outlet length of RL_HZJ18 afterloader[J]. Chinese Medical Equipment Journal,2009,30(4):64-65(in Chinese).
[13] Evans M D C,Devic S,Podgorsak E B. High dose-rate brachytherapy source position quality assurance using radiochromic film[J]. Med Dosim,2007,32(1):13-15.
[14] Syam Kumar S A,Gangadharan S P,Cheruparambil A P,et al. To determine the source dwell positions of HDR brachytherapy using 2D 729 ion chamber array[J]. Journal of Radiotherapy in Practice,2015,14(4):403-409.
Improved Design and Study of the Accuracy of the Source-Cable Transmission Mechanism of Afterloader
Yang Zhiyong,Xie Xianshi,Li Siyuan,Jiang Shan
(School of Mechanical Engineering,Tianjin University,Tianjin 300350,China)
The goals of this paper are to mitigate the situation involving the radioactive source being attached to an undesired location during the operation of an afterloader and to increase the source-to-position accuracy of the radioactive source. An improved structural design was developed for the source-cable transmission mechanism,which is the key treatment mechanism of the afterloader. First,the design of the groove shape of the reel,which is the key component of this mechanism,was improved. In this paper,after performing a comparative analysis,the design scheme of the triangular groove was selected,and the friction driving force of the source cable was calculated based on a triangular groove angle of 60°;this result proved that the triangular groove can provide sufficient friction driving force. To prevent the source cable from appearing disordered during the process of cable feeding or winding,it was completely wrapped in the tension belt based on the aforementioned improvement measures. Second,the spring tension of the source-cable transmission mechanism was designed and calculated. The minimum tension value of the tension spring was calculated using the friction transmission force model;for the conditions determined by the model,no slip was found to exist between the tension belt and the reel. Third,a floating guide tube was designed to assist in feeding or withdrawing the cable,and the influence of the floating guide tube on improving the source-to-position accuracy was analyzed. Finally,based on components such as the electromagnetic locator,the fiber optic sensor,and the linear guide rail,an innovative experimental platform was set up for improved verification of results. The control experiments were performed by setting up experimental groups using different values of spring tension,different grooved reels,and different floating guide tubes. The experimental data show that the source-to-position accuracy of the afterloader has been improved to be ≤±0.6mm. Moreover,the occurrences of the source being attached to an undesired location are significantly reduced when the cable feeds or withdraws.
afterloader;source-to-position accuracy;source cable transmission mechanism;source reel
the Key Program of the National Natural Science Foundation of China(No. 51775368),the Technology Planning Project of Guangdong Province,China(No. 2017B020210004).
TH122
A
0493-2137(2019)09-0900-08
2018-10-15;
2018-12-29.
杨志永(1972—),男,博士,教授,meyang@tju.edu.cn.
谢贤诗,xsxie@tju.edu.cn.
国家自然科学基金重点项目(51775368);广东省省级科技计划资助项目(2017B020210004).
10.11784/tdxbz201810018
(责任编辑:金顺爱)
猜你喜欢
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
核安全(2021年6期)2021-12-31
石油石化节能(2021年5期)2021-01-11
能源研究与信息(2020年3期)2020-11-25
能源(2018年8期)2018-09-21
能源(2018年8期)2018-09-21
西部论丛(2018年8期)2018-09-03
军事运筹与系统工程(2018年3期)2018-03-26
中国新技术新产品(2018年4期)2018-02-23