基于真空吸附的桥墩病害检测机器人
2019-06-27 01:48兰京黄文韬廖国美苏海林习慈羊
科技创新与应用 2019年8期
兰京 黄文韬 廖国美 苏海林 习慈羊

摘 要:文章运用真空吸附原理,设计一种真空吸附式桥墩病害检测四足爬壁机器人,用于桥墩病害的检测。该机器人利用气泵作为真空产生装置,设计一种带球阀的气路管道对吸盘内的空气压力进行控制,使机器人运动腿末端的吸盘吸附在桥墩上。机器人每条运动腿上都有两个舵机,由单片机控制其在桥墩上运动。通过机器人主体上安装的高清摄像头,可实时采集桥墩壁面的状况,帮助工作人员更准确、快速的判断桥墩病害的存在,可以代替人在危险的桥墩上对桥墩进行检测,提高工作效率,降低风险。
关键词:真空吸附;四足;桥墩病害;爬壁机器人
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2019)08-0044-02
Abstract: Based on the principle of vacuum adsorption, a four-legged climbing robot for pier disease detection is designed in this paper, which can be used to detect pier diseases. The robot uses the air pump as the vacuum generating device, and designs a kind of air pipe with ball valve to control the air pressure in the sucker, so that the sucker at the end of the robot's moving leg is adsorbed on the pier. The robot has two steering gears on each moving leg, which is controlled by a single chip microcomputer to move on the pier. The high-definition camera installed on the main body of the robot can collect the condition of the pier wall in real time, help the staff to judge the existence of the pier disease more accurately and quickly, and can replace the person to detect the pier on the dangerous pier, so as to improve work efficiency and reduce risk.
Keywords: vacuum adsorption; quadruped; pier disease; wall climbing robot
引言
目前,隨着科技的日益发展,各式各样的桥梁进入我们的视野,为人们的出行带来巨大便利。但是,众多的桥梁病害带来的安全问题也不容小觑,为此需要对桥梁的安全状况进行检测,以保障国家和人们的财产生命安全。但是,对于桥梁的病害检测我国主要采取人工检测为主,以桥梁检测车、桥梁检测系统为辅,这些方法检测效率低、成本高、检测的精度差。为此,爬壁机器人的出现为桥梁病害检测带来巨大的改变。
爬壁机器人的吸附方式主要有仿生吸附、负压吸附、真空吸附、旋翼吸附、磁力吸附和振动吸附等几种[1]。真空吸附作为一种发展比较早,吸附可靠、稳定,结构比较简单的吸附方式,得到广泛的使用。但是,这种吸附方式对于壁面的平整度和光洁度要求较高,因此需要设计一种适应性良好的吸盘。为了让机器人可靠地吸附在桥墩壁面,保持壁面行走时有良好的稳定性,可将几个吸盘串联形成吸盘组。这样,当其中某一子吸盘不起作用时也不会让机器人发生脱落,减小机器人脱落的可能性。
文中将利用真空技术,基于真空模块设备,结合一种爬壁机器人平台[1]。利用气泵来充当真空产生装置,同时结合带球阀的真空气道传输装置,让吸盘吸附在桥墩上。将舵机安装在每条机械腿的关节处,利用单片机进行控制,实现机器人在桥墩壁面上运动。对于桥墩的病害检测主要通过机器人的高清摄像头,将桥墩壁面的实时情况传送给工作人员,帮助工作人员对桥墩进行观察分析。提高了桥墩病害检测的速度、精度和安全性。
1 机器人的结构
该桥墩病害检测机器人是以单片机为控制核心,实现在桥墩壁面上进行移动。利用仿生学原理,设计机器人为四足,每条运动足的运动末梢都带有吸盘。爬壁机器人运动足过少,容易发生脱落和倾覆现象;运动足过多增加了编程控制的复杂性,机器人成本升高不利于机器人的推广利用。因此,机器人采用多吸盘的四足结构。
壁面机器人是集机构学、传感技术、控制和信息技术等科学为一体的高技术产品[2]。本文设计的机器人的结构包括机器人主体1、摄像头2、运动腿3和吸盘结构4。机器人主体1结构包含电路板、单片机、电源和真空产生装置,摄像头2由控制电路连接控制。在机器人的主体1的左右两侧对称布置有两条运动腿3,且运动腿3的活动关节处都安装有舵机,这样的运动腿3运动都具有多个自由度,机器人可以在桥墩壁面多方向的移动。每个运动腿3由舵机控制其运动,舵机通过单片机进行控制。运动腿3的运动末梢上均设置吸盘结构4,吸盘结构4通过机器人主体1内置的真空产生装置控制吸盘吸放。为保证机器人在壁面吸附的紧密性和结构的牢固性,该桥墩病害检测机器人的运动腿用铝合金材料,其他部分采用工程塑料以减轻重量,降低机器人运行过程中脱落的可能性。
2 吸附工作原理
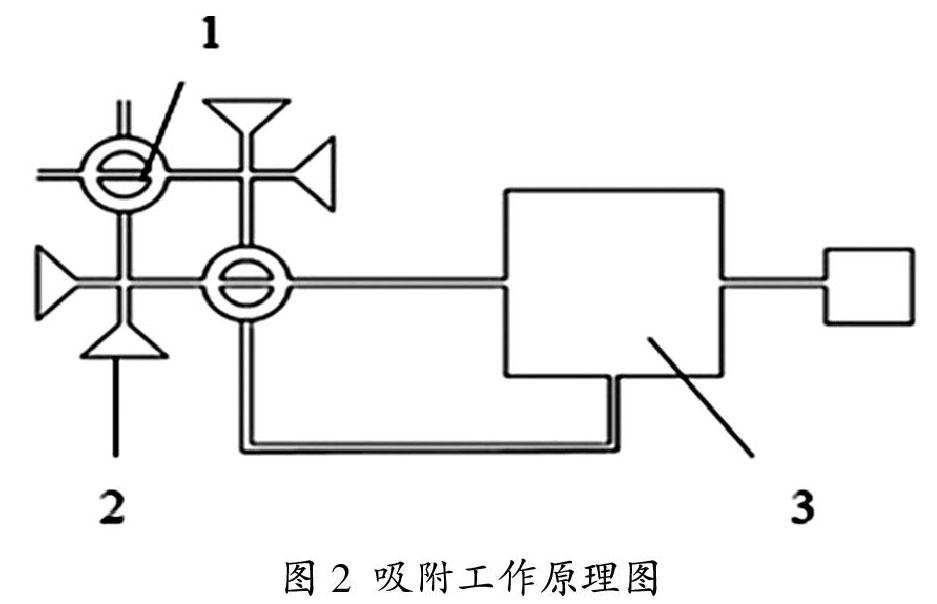
该桥墩病害检测机器人采用了真空吸附原理。由真空泵产生真空,配合吸盘以及带有双球阀的气管回路将机器人的吸盘吸附在桥墩壁面上,以实现机器人吸附在桥墩壁面上的目的。
机器人吸附工作原理图如图2所示。图中1构件为球阀,2构件为吸盘,3构件为真空腔,机器人采用吸盘吸附墙壁,使吸盘与壁面的吸附力大于摩擦力,以达到机器人在墙壁上不脱落的目的。如图2所示,真空产生装置通过气管与吸盘连结,球阀安装在气管中,控制吸盘内空气。当需要吸盘进行吸附时,球阀转动一定角度,使得机器人前左运动腿与后右运动腿(图左下方两吸盘)进气管导通而其余两条运动腿的进气管关闭,通过气泵抽气,促使左下方两吸盘内的空气通过连接管被抽走,形成真空,让吸盘吸附在墙面,当球阀再次转动时,另外两个对向的吸盘进行吸附,此两吸盘脱落,最终实现吸附目的。
带有双球阀的气路进行设计,能够实现吸盘吸附在桥墩壁面上。刚开始时,机器人的四个吸盘都能同时吸附;在运动过程中,则采用了两个吸盘为一组进行吸附。吸盘可靠吸附是机器人正常工作的关键,吸盘吸附和脱离桥墩壁面的时间影响机器人的运行效率。对单个吸盘及真空泵进行了实验,得到单个吸盘吸紧壁面时间为1.82s,吸盘受水平力安全系数为1.84,吸盘受铅锤力的安全系数为10.22,也就是当吸盘受竖直力作用时更容易脱离墙面。
3 机器人运动原理
机器人的运动是靠四条运动腿紧密配合实现的,模仿壁虎在墙面上爬行。首先,将机器人放置在桥墩壁面,使机器人的四足都吸附在桥墩上。其次,再通过单片机程序控制,让机器人左上足和右下足抬起脱离壁面,并向前(向后)运动,另外两足牢牢的吸附在桥墩壁面上。然后,左上、右下两足上的舵机运动,这样将拖动主体跟着运动。最后,让左上足和右下足吸附在桥墩壁面,完成一次运动。当机器人斜对向的两条运动腿运动时,另外两条斜对向的运动腿运动末端的吸盘吸附在桥墩上,这样机器人在桥墩壁面上既可以运动也能保证吸附在壁面上。四条运动腿协同作用,使机器人不仅在垂直壁面上具有良好的爬壁性能,而且在有一定倾斜角度的壁面也能轻松行走。突破了传统的多足爬墙机器人单关节设计的局限性,使得机器人获得了更大的避障空间[3]。
为保证机器人能够全面的检测到桥墩壁面,在机器人的“身上”还安装有传感器。传感器不仅可以检测到机器人距离桥墩边缘的距离,而且还可以检测到机器人距离桥墩下沿水源的距离和桥面的距离。通过编程控制,让机器人本体和吸盘尽量远离这些危险区域,保证机器人能够正常工作。当机器人的吸盘处于桥墩的边缘或者进入到桥墩下沿的水中,很可能让吸盘的吸附功能失效,机器人就会脱离桥墩壁面。
4 结束语
在爬壁机器人发展的早期,主要以单吸盘吸附为主,极易出现吸附不稳定的现象,严重时会出现机器人脱离桥墩壁面以及倾覆现象。近年来多吸盘吸附的爬壁机器人逐渐出现,填补了单吸盘机器人的缺点,但是对设计者的编程能力要求较高,运动结构较为复杂。
文中提出了一种多吸盘吸附的爬壁机器人,集合了单吸盘与多吸盘吸附机器人的许多优点。本文对该四足桥墩病害检测机器人的结构、吸附原理和运动原理进行了论述。通过理论分析,该四足桥墩病害检测机器人能够跨越较大的阻碍物及桥墩沟壑,紧密吸附在各种桥墩壁面上,在桥墩壁面能够灵活走动,抵抗倾覆的能力也很强。可以用于检测大多数桥墩,具有检测面积广、检测精度高、检测方便的优点,对桥墩的初步检测能起到巨大的辅助作用。
参考文献:
[1]吕鑫,王从庆.一种爬壁机器人真空吸附性能分析与运动切换策略[J].机械科学与技术,2014,33(2):164-169.
[2]何雪明,丁毅,朱明波.真空吸附式爬壁機器人设计[J].西北轻工业学院学报,1997(15):1-6.
[3]张博洋,赵紫薇,欧阳钧,等.基于真空吸附的双足爬墙机器人研究[J].液压气动与密封,2015(6):68-71.
[4]张国平,杨杰,高婧宇.爬壁机器人真空吸附及运动方式探讨[J].液压气动与密封,2007(01):11-14.
[5]陶龙,张国良,贾哲.仿人机器人分布式控制系统研究及实现[J].工业控制计算机,2008,21(9):71-72.
[6]宁思衡,金扬皓,刘凌.可变形爬壁机器人研究及对我国机器人标准制定工作的建议[J].中国标准导报,2016(2):53-57.