圆弧轨迹拟合的步进电机模糊控制系统
2019-06-27 01:48许钊
科技创新与应用 2019年8期
许钊
摘 要:制作高闪耀角一致性的曲面闪耀光栅需要工作台能够进行曲线拟合运动,而工作台的运动控制是由步进电机完成的,因此为了得到高精度的运动轨迹,需要对控制工作台运功的步进电机控制算法进行研究。首先,介绍了曲面闪耀光栅离子束刻蚀机三维工作台的原理方案和一种适用于工作台的圆弧拟合算法,提出了一种适用于步进电机的模糊控制算法。随后,开展了三维工作台运动轨迹拟合实验,并对不同控制方法下的拟合轨迹进行了对比。实验结果表明:工作台进行15个周期的凸面曲线拟合运动的累积定位误差小于0.15mm,角度误差小于0.02°。进一步提升了三维运动工作平台的稳定性和精度。
关键词:步进电机;模糊控制;轨迹拟合
中图分类号:TM383.6 文献标志码:A 文章编号:2095-2945(2019)08-0073-02
Abstract: In order to make curved blazed gratings with high flash angle consistency, it is necessary for the worktable to be able to carry out curve fitting motion, and the motion control of the worktable is completed by the stepping motor. So in order to obtain the high precision motion track, it is necessary to study the stepping motor control algorithm which controls the operation power of the worktable. Firstly, the principle and scheme of 3D worktable of curved blazed grating ion beam etching machine and an arc fitting algorithm suitable for worktable are introduced. A fuzzy control algorithm for stepping motor is proposed. Then, the fitting experiment of three-dimensional worktable motion trajectory is carried out, and the fitting trajectory under different control methods is compared. The experimental results show that the cumulative positioning error is less than 0.15 mm and the angle error is less than 0.02°for 15 periods of convex curve fitting motion of the worktable. The stability and accuracy of the three-dimensional motion working platform are further improved.
Keywords: stepping motor; fuzzy control; trajectory fitting
1 刻蝕轨迹拟合理论模型
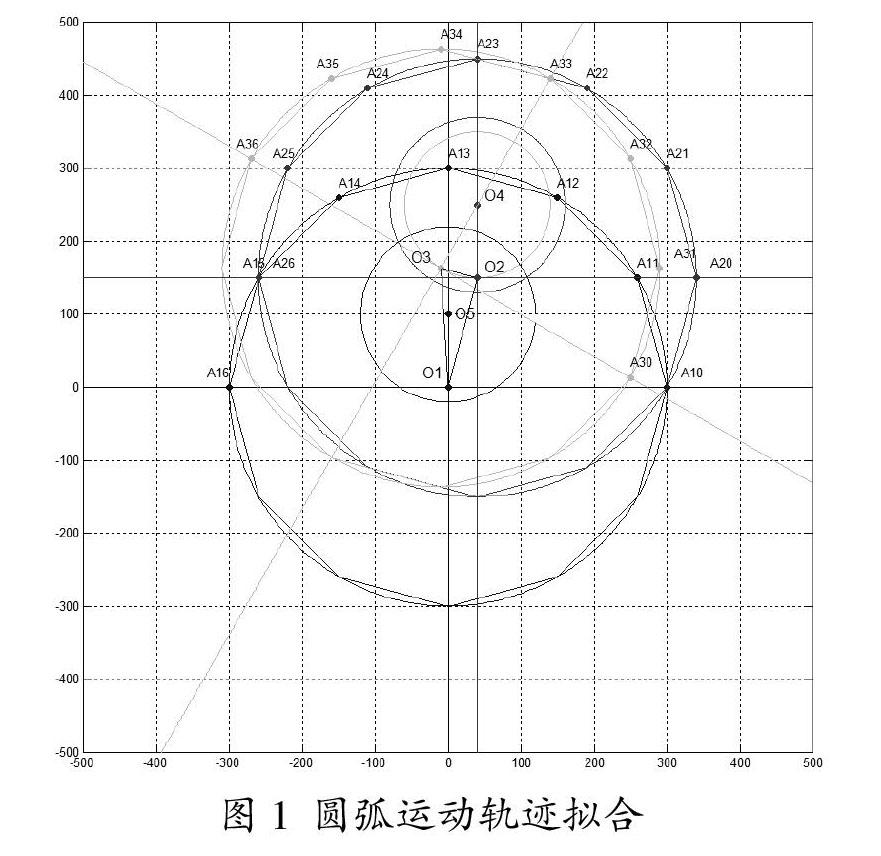
由于所需应用的工作平台无法实现直接的圆周运动,想要圆的正内接x边形无限接近于圆,只需拟合次数x足够大即可。而且这个多边形的每一条边均为直线,并可以通过X-Y运动合成,角度误差还可以通过θ轴调整,从而使工作平台可以在误差范围内实现满足要求的类似于圆的运动轨迹。图1是其运动轨迹拟合过程。
2 步进电机模糊控制的实现
图2为所应用的步进电机控制系统结构图,e为步进电机速度偏差,u为步进电机脉冲频率控制量。积分控制器输出为ui=kI∑iei,模糊控制器的总输出为二维模糊控制器输出控制量u与积分控制器输出叠加,即uf=u+ui。以上所述系统不仅可完全将系统稳态误差消除,还可以消除自激振荡。
模糊控制系统采用二维控制器,通过齐格勒-尼科尔斯法得出了PID控制所需的初始值。速度偏差e和偏差变化率ec作为输入。预定的目标速度v作为本系统的输入,反馈输入是通过光电传感器测得的步进电机实际转速,之后代入公式得出转速偏差e和偏差变化率ec,经模糊化和量化后作为模糊控制器的输入信号,根据模糊规则判定后发出相应的模糊控制量,模糊控制量需再经过解模糊这一关键步骤后再输出步进电机转速v的精确增加量,与前一个系统周期的步进电机转速相加后输出实时转速。本控制系统运用两输入单输出结构,所有输出控制采用同样的模糊控制规则表和系统参数,实际输出速度为v′(k)=v′(k-1)+u(k)。
模糊控制规则的选择:
本控制系统采用的是模糊控制,其中有三个关键的模糊变量:偏差e、偏差变化率ec和输出u。对于模糊控制系统来说,控制语言,即模糊变量越多,描述就会越精确,也会有更高得控制精度,控制效果也会越好。但是相对而言,太细的划分会使控制规则变得复杂,计算量变大,控制系统的实现也会变得更加困难。因此在本控制系统中选取了数量适中的三个模糊变量。在本模糊控制系统中,Ee、Eec和U的模糊子集取相同的语言值,即{NB,NM,NS,ZO,PS,PM,PB},对应的论域[-3,-2,-1,0,1,2,3]。
隶属度函数在模糊控制系统中的作用就是将实际的输入量(如本系统中的转速v等)转变为模糊量。隶属度函数的特征也反映了其系统特性,比如,隶属度函数的形状越陡,其分辨率也就越高,控制灵敏度也就越高。相对的,形状平缓的隶属度函数的控制特性相对平稳,系统稳定性相对较好。除以上之外,速度反馈量中的噪音也是实际系统设计中必须要考虑的问题。根据上述描述,三角形函数形状的隶属度函数形状简单,计算难度也不大,分辨率相对于复杂隶属度函数相差不大,具有很好的性能,因此,在本系统中,Ee、Eec和U的隶属函数都采用三角形函数,如图3所示。
在模糊控制系统中,模糊规则需根据情况随时改变,以求达到比较好的控制效果。当步进电机转速偏差比较大的时候,模糊控制规则应该使系统的输出尽量减小偏差。而当速度这一特征稳定后,模糊控制规则应该保证系统的稳定性,避免超调量。中位数法,最大隶属度法是最常用的解模糊方法。
3 实验结果及讨论
为检验三维工作台的定位精度、重复性及稳定性,工作台的运动轨迹通过光栅尺以及编码器记录,通过记录刻蚀不同刻蚀角度和曲率半径的凹面光栅和曲面光栅运动轨迹并导入Matlab中分析,并得到拟合轨迹以及误差。
图5为经典的PID控制的步进电机控制的工作平台刻蚀角度10°,曲率半径为100的凸面光栅轨迹。而图6为模糊的PID控制的步进电机控制的工作平台刻蚀角度10°,曲率半径为100的凸面光栅轨迹。
4 結束语
笔者提出了一种步进电机的模糊控制算法,加快了响应时间,减少了超调量,通过对步进电机的精确控制,达到了对曲面闪耀光栅刻蚀中三维工作台精确控制的效果,提升了三维工作台曲线拟合运动的运动精度。记录了在不同情况下的三维运动工作平台的运动轨迹,并对实验结果进行对比,实验结果表明,通过模糊控制的步进电机控制的三维工作平台减小了累积的定位偏差和每次的角度误差,在刻蚀角度10°,曲率半径为100的凸面光栅时累计的定位偏差小于0.15mm,每次的角度误差小于0.02°。进一步提升了运动精度的要求。
参考文献:
[1]潘强,鞠玉涛.一种步进电机模糊自整定PID闭环控制系统设计[J].机床与液压,2013(13).
[2]刘虎,张仁杰,刘振,等.基于ARM和TMC262的步进电机运动控制系统[J].仪表技术与传感器,2015(10).
[3]茌宏理,窦金生.基于模糊PID的永磁同步电机矢量控制系统的仿真研究[J].电子设计工程,2017(05).
[4]翟雁,郭阳宽,祝连庆,等.步进电机模糊PID闭环控制系统仿真研究[J].现代电子技术,2015(11).
[5]徐煜明.步进电机速度控制的研究与实现[J].工矿自动化,2007(02).
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学家(2016年3期)2016-12-30
电子技术与软件工程(2016年22期)2016-12-26
科学与财富(2016年26期)2016-12-01
科技视界(2016年24期)2016-10-11
科技视界(2016年15期)2016-06-30
科技视界(2016年7期)2016-04-01