岸桥关路无人化作业可行性措施
2019-06-27 01:48刘长兴
科技创新与应用 2019年8期
刘长兴
摘 要:改革开放后,我国经济呈现了高速增长的态势,国际贸易也日益频繁,在此背景之下,港口货运量也不断增长,港口机械化程度也在不断提高,但随之而来的,还有安全管理上的问题。文章介绍了集卡定位系统、智能理货系统、集装箱扭锁工作站这三种措施,以此来探讨港口岸桥关路无人化作业的可行性,降低作业人员的安全风险。
关键词:岸桥作业;无人化;集卡定位;智能理货;扭锁工作站
中图分类号:U695 文献标志码:A 文章編号:2095-2945(2019)08-0128-02
Abstract: After the Reform and Opening up, China's economy has shown a trend of rapid growth, and international trade is becoming more and more frequent. In this situation, the volume of port freight is also increasing, and the degree of port mechanization is also increasing, but with it, and there are security management issues. This paper introduces three measures: card positioning system, intelligent tally system and container twisting lock workstation, in order to explore the feasibility of unmanned operation of Qiaoguan Road at port and reduce the safety risk of operators.
Keywords: quayside crane operation; unmanned; collecting card positioning; intelligent tally; twisting lock workstation
引言
随着港口装卸技术的不断提高,码头集装箱装卸设备也在不断的更新与优化,其中较为常见的设备有:岸边集装箱起重机、门机、轮胎式起重机、正面吊、堆高机等共同组成的一种港口装卸机械组合[1]。岸边集装箱起重机通常被人简称岸桥,是一种复杂而又全面的装卸设备,也是目前人们工作中研究和探讨较多的一种,岸桥吊具或集装箱所经之路通常简称为关路。
1 集装箱装卸作业流程
目前集装箱卸船的一般流程如下:船靠岸后,通过岸桥对船上的集装箱进行吊装,劳务人员人工定位集卡车后将集装箱放上集卡车,理货人员对集装箱进行登记核对,然后再由劳务人员在集装箱底部拆/装集装箱扭锁,而后运送到堆场内,再通过龙门吊进行吊装堆垛。装船流程则是将此顺序颠倒,不再赘述。
2 集装箱装卸作业风险
2.1 坠物风险
在进行集装箱装卸作业时,岸桥机下作业人员所处的位置大部分位于关路下方,一旦发生钢丝绳断绳、吊具旋锁脱离、高处螺栓疲劳剪断、金属构件疲劳脱焊/撕裂等高空坠物事故,很容易造成作业人员的伤亡。
2.2 遇溺风险
进行装卸作业时,经常在码头和船附近行走,会有意外落水导致遇溺的风险。
2.3 坠落风险
进行集装箱转锁的装卸操作时,作业人员需要上到集装箱顶,逐层进行操作,遇到摇晃或是绳索断裂等异常情况,作业人员会有从集装箱顶跌落的风险。
2.4 车辆伤害风险
运送集装箱需要用到码头集卡车,在进行人工的集卡定位时,集卡驾驶员往往需要反复多次才能准确定位,不仅容易出现视野受阻、疲劳驾驶等异常情况,装卸货时附近又聚集了大量的工作人员和作业车辆,这种情况下容易撞伤附近的作业人员或者撞上其他车辆。
3 风险防范措施
综上所述,集装箱装卸作业过程中出现的风险危害大部分是由于作业人员处于危险区域造成的,而随着技术的不断发展,目前已经出现一些新技术来解决此类问题,让作业人员不必在高危区域进行集装箱装卸作业。
3.1 集卡对位系统
一直以来,岸桥吊具与集卡之间对位都是根据工人摆放定位杆或者反光锥为参照物,供集卡驾驶员的目测对位,驾驶员需要反复移动集卡车位置才能完成对位操作,不仅影响作业效率,同时也存在很大的安全隐患。近几年来,集卡对位技术不断发展,出现了许多提高作业效率的方法,例如基于光幕光电接受原理的对位系统、基于红外光反射原理的对位系统、采用图像软件分析测距的对位系统等等,但这些还无法完全满足装卸集装箱作业需求,存在无法多车道作业、无法适应异常天候情况等问题。
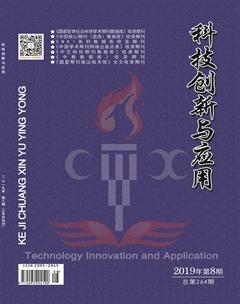
不过目前最新的岸桥集卡对位系统很好的解决了这些问题,采用激光扫描测距技术、模式识别和自动控制技术,能够根据作业类型及时指示集卡司机调整停靠位置,做到集卡预先准确停在岸桥起吊位置,减少岸桥吊具对位集卡的时间,提高码头岸边作业效率。该系统是在车道上方岸桥的横梁上安装一个云台,云台可以通过编程控制转动角度,激光扫描测距仪就安装在云台上,对多条车道扫描测距(如图1)。
对比传统对位方式,激光扫描测距技术具有以下优点:
(1)集卡对位精度:<10cm,精准确定集卡停车位置。
(2)自动判断集卡作业方向,支持多车道双方向的集卡对位。
(3)无需工人人工定位,减少关路下作业人员。
(4)在集卡未停到位的情况下,对吊具下降采取限制措施,主动防护,以保证人车安全。
(5)能实现对45ft、40ft、双20ft、单20ft集装箱装车和卸车的对位。
(6)对位信息通过四个LED显示屏显示,亮度和字幕大小满足全天候工作。
3.2 智能理货系统
传统的理货方式是由理货员使用理货终端、照相机等设备,在集装箱装卸现场露天作业进行数据采集,作业时不光需要面对烈日严寒等气候,理货时还经常需要上下集卡车架,劳动强度大、工作环境恶劣,很容易发生安全事故。
随着计算机技术的发展,目前出现了一种智能理货系统能解决传统人工理货问题。新型集装箱码头智能理货系統,主要由数据采集系统、数据传输系统、图像识别系统、贝位识别系统等组成[2]。这套系统在实际作业中,先由数据采集系统来采集数据,其原理是通过多台球体摄像机采集集装箱和车顶号的图像,之后通过数据传输系统传输拍摄到的图像数据,再通过图像识别系统和贝位识别系统识别出图像中的箱号、车号、船图贝位等信息。
对比传统理货方式,智能理货系统具有以下优点:
(1)大部分理货流程由计算机程序自动运行,工作效率大幅提升。
(2)节约人力资源。
(3)无需人员露天作业,没有安全风险。
3.3 集装箱扭锁工作站
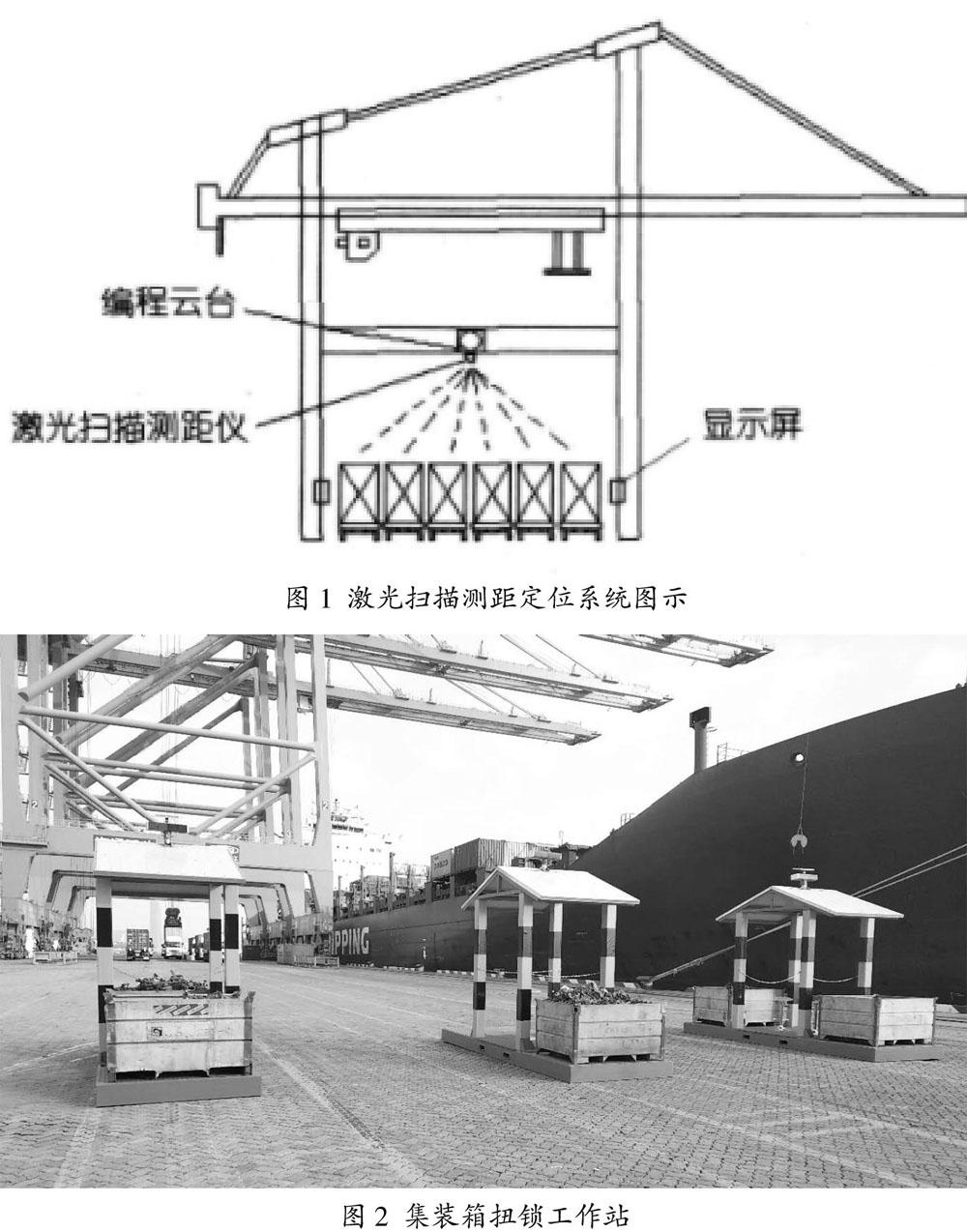
传统的装卸作业中,集装箱装船前需要在底部安装转锁,卸船前则需要先拆下转锁,这一操作都是通过人工进行,平均一台岸桥需要2名作业员来进行拆装锁这一重复性很强的机械操作,不仅耗费了大量人力,还埋下了不小的安全隐患,国内和国外发生了许多起拆装锁作业人员的伤亡事故,主要是高空坠物引起。
为了解决这一问题,目前已经有一些解决措施。这里要介绍的是集装箱扭锁工作站(如图2),传统作业模式中集装箱装卸船时扭锁均在对应作业岸桥关路下,待集装箱到位稳定后再由作业人员进行拆/装扭锁,而扭锁工作站是把该工序移到作业岸桥的关路外,一般工作站设立在集卡车进口或出口处,作业员在工作站中进行拆/装扭锁工作,避开岸桥作业关路,远离了高空坠物的高风险区域,实际生产中确实有效降低了事故发生风险。
4 结束语
随着港口装卸技术的不断发展,岸桥关路无人化作业已是必然趋势,这些新出现的技术投入实际使用后,不仅节约了大量人力成本,提升了集装箱装卸作业效率,作业地点也远离了危险高发位置,在安全风险上也比传统化作业低了许多,集装箱装卸作业也将随之完成劳动密集型向知识密集型的转型。
参考文献:
[1]周东.码头集装箱装卸系统管理应用简介[J].城市建设理论研究:电子版,2013(16).
[2]张华,李东,梁万敏,等.港口集装箱智能视频数字理货信息技术研究[J].珠江水运,2015(15).