
机动式S模式航管二次雷达结构设计
2019-06-28 00:20李杨王兴
科技经济市场 2019年4期
关键词:结构设计
李杨 王兴


摘 要:车载式二次雷达设计的难点之一是如何提高二次雷达的机动性能,针对这个问题本文论述了车载式航管二次雷达机动性设计中的关键技术及实现方法,并对机动式航管雷达的结构设计进行了总结归纳,提出了天线阵面折叠的新方法。同时指出了设计要点和设计过程中应该着重注意的问题,供同行其他人员参考。
关键词:机动式;航管雷达;结构设计
2014年全国低空空域管理改革工作会议在北京闭幕,并且我国自2015年已经全面开放低空空域管制,此举将加速推进通用航空产业以及空管综合系统的快速发展[1]。
伴随着低空空域的逐步放开,种类繁杂的各类通用航空器充斥于整个空域。空域管制员依据二次雷达很容易获取通用航空器的编号、高度、方位等参数,未来空管二次雷达在民航空中交通管制的作用将愈发显著[2,3]。
机动式航管二次雷达是机场航管雷达的补充保障,机动式航管雷达机动性高,越野运输、架设及撤退时间短,可在战时或应急时迅速开赴到指定区域实现空中交通管制保障任务。
目前国内机动式航管二次雷达已实现手动及半自动架设或撤退天线,全自动方式还未实现。本文将大口径阵列天线高机动举升、自动调平以及自动折叠技术应用于机动式航管雷达,大大提升了航管二次雷达的机动性能[4,5]。
1 雷达总体设计
1.1 系统构成
机动式航管二次雷达主要由天线、设备箱、转台、举升机构、液压调平系统以及车载平台等组成。本系统由多个分系统组成,设计包括总体结构设计、人机工程设计还有安全性设计以及三防设计。
1.2 技术指標
本文的技术指标包括天线架设、环境条件和机动性等。这些技术指标也是系统的设计依据。
1.2.1 天线架设
工作状态下天线阵面顶端距载车平台最大高度是5.7米,并可在任意高度停留。天线方位可在0~360°内调整,并且工作状态天线需满足±5°范围内调整并可锁定。
1.2.2 环境条件
(1)环境温度:
室外设备:工作时-35~+55℃;运输、存储时-45~+70℃
室内设备:工作时0~+45℃;运输、存储时-45~+70℃
(2)抗风能力:阵风≤40m/s时能够正常工作;阵风≤55m/s时停机不破坏;
(3)抗冲击及振动载荷:满足GJB1621.7-935.7节中要求[6];
(4)三防措施:设备系统具有防潮气、防烟雾、防霉菌的能力。
1.2.3 机动性能
(1)运输方式:车载方式,单车或两个运输单元运输;
(2)架撤时间:全系统架设35min/4人,撤收25min/4人;
(3)特定功能:自动寻北、定位、调平、倒竖、升降、锁紧;
(4)运输条件:满足公路运输、铁路运输、空运及海运要求。
2 结构设计
根据市场调研,用户对雷达总体布局的要求是集成度高,空间利用率高,架设及撤收方便、快捷、稳定可靠,即能够在规定时间内完成由卧倒运输状态转为工作状态 [7]。针对用户的实际需求,结合机动式航管二次雷达的结构特点和功能,将伺服控制机柜、液压控制系统集成于一辆军用越野载车平台上,显控处理平台与发射机柜集成于另一辆方舱载车平台内。公路运输状态下,天线载车平台的外形尺寸为长8845mm,宽2450mm,高3350mm,整车通过性好。工作状态下,连杆举升机构能够将天线阵面举升至5750mm,提高了二次雷达的阵地适应性,图1为机动式航管二次雷达工作状态示意图。
2.1 天线设计
天线的结构设计是机动式航管二次雷达结构设计的关键之一。为保证机动式航管二次雷达相较于固定式航管的探测威力相当,机动式依然沿用了原有航管的列线源,单根列馈长度为1800mm。35根列线源及反射棒组成的整个天线阵面尺寸为8000mm×1500mm。这为天线的折叠反转保证满足公路铁路运输限制带来了很大难度。
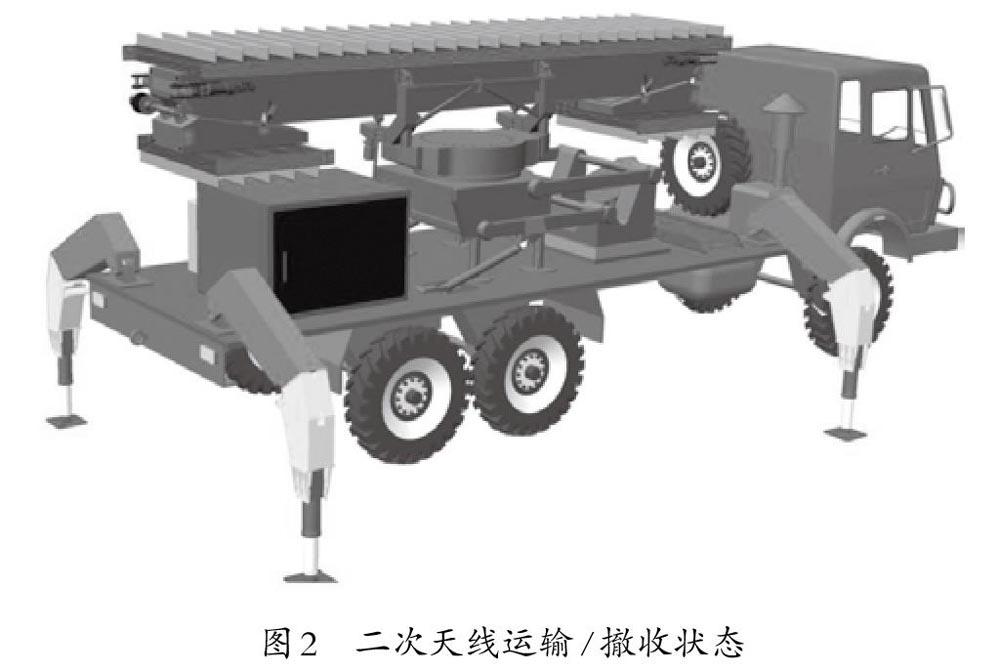
2.1.1 天线折叠
为满足雷达的整车运输条件,整个天线阵面分为3块,主阵面由25根列线源及反射棒组成,振子间距为225mm,左右边块阵面均由5根阵子组成。运输状态时两侧变快阵面向背侧折叠180°并锁定,天线整体在两支撑的滚珠丝杠动作下倾倒90°至水平位置,完成天线阵面的折叠,天线拼接到位由定位销及定位面完成定位,折叠与展开均是自动完成,电动锁紧机构完成边块之间的锁定以保证天线阵面的精度要求。图2为天线折叠示意图。
2.2 液压系统结构
举升机构是实现雷达架撤自动化和机动性的重要组成部分。系统中天线车的调平、架撤机构均采用液压驱动,为了使系统冲击压力最小,液压回路需要简化。通过设定过压保护以及互锁检测来确保液压系统安全可靠,整体机构动作和安全连锁需要通过控制电路及软件来实现。
2.2.1 举升机构
天线阵面与设备箱以转台支座为支撑,以背向两电动滚珠丝杠为俯仰支撑。天线支座与转台的架高举升机构依靠平行四连杆机构,采用油缸驱动举升,举升到位后连杆机构上的横向伸缩销完成对天线的举升机构的锁定。
2.2.2 液压自动调平系统设计
液压调平系统主要由泵源、调平执行机构、水平仪等组成,其主要指标:
(1)调平时间 ≤3min;
(2)调平精度 ≤6;
(3)单腿承载 ≥10t。
液压自动调平系统可以对承载平台连同载车一起调平,水平仪安装在载车平台上,根据水平仪的指示,通过控制四只调平撑腿的升降实现调平精度达到6。液压调平系统原理图见图4。
调平执行机构是实现液压自动调平系统的另一个关键机构。工作状态下调平执行机构示意图见图5左侧,该执行机构由液压马达、蛙腿、液压油缸和调平撑腿四个部件组成,当雷达完成撤收处于运输状态时见图5右侧。
2.3 载车平台
工作状态下载车平台同时要承受装备重量、车底盘重量以及风力矩载荷的作用。根据总体设计要求,平台的最大变形量不能超过15mm。针对平台的刚强度要求,需要建立骨架的有限元模型,并借助ANSYS软件对平台进行力学分析。
2.3.1 有限元模型
载车平台结构如图6所示,长8410mm,宽2500mm,
高300mm。由两根主大梁、若干横梁及边梁构成骨架式结构,固定方式为焊接,主大梁选用工字钢,横梁选用槽钢,边梁选用矩形方管梁。
有限元单元类型选择beam188,单元数2721,每个调平撑腿分别进行Ux、Uy、Uz、ROTx、ROTy方向约束,施加载荷包括设备自重以及沿X、Y方向的风力矩。在平台上代表性选择10测点,测点分布如图7所示,通过分析对应点应力值可基本评估载车平台受力情况。
2.3.2 工况与分析结果
对图7中的各应力点分别施加X方向和Y方向的风力距,风力大小分别1000N、1600N、2100N,设备重量按实际作用面以均布載荷施加在对应节点上。
根据两种工况下的载车平台的分析计算结果得出以下结论:
3 相关问题解决
3.1 操作安全性设计
机动式S模式航管二次雷达架撤系统与折叠动作比较复杂,须严格定义折叠动作流程。对于动作节点位置安装接近开关或红外对接测量装置,以此确保整个天线车系统架撤过程的安全有序。
3.2 设备三防设计
系统架撤动作的精度直接决定了雷达阵面的精度,定位面、定位件、导向件等需有很好的表面粗糙度和形位公差要求,因此架撤系统各折叠动作的执行机构不能出现生锈卡死现象。天馈系统设备箱内部安装有中心馈电网络、功分网络、波束控制、电源等电子设备,必须满足三防设计要求。为此对天线箱体进行煤油密封试验,排除箱体的焊接缺陷;在维修安装窗口设计密封槽;在箱体底部开有防水防尘透气塞,以免潮气在箱体内积聚影响设备可靠性。
4 结束语
4.1 结论
现阶段固定式民航空管一、二次雷达已经有了成熟的发展,机动式航管作为未来航管雷达发展的新方向,其机动性能是关键因素。文中论述了机动式航管雷达的整车布局,提出了天线自动折叠、架撤以及自动调平的新方法,并指出了设计中应该注意的问题,可供同行参考。
4.2 展望
如何改进以提升整个载车系统机动性能将是今后的工作重点。为保证天线有足够的威力,目前航管雷达列线源尺寸仍较大。后期可改进天线振子结构,将前端振子与后端功分网络垂直“L”形分布,在保证天线阵威力的同时可较大减小振子宽度方向尺寸,从而大大降低天线阵面通过性,提高整个天线阵系统的机动性。
参考文献:
[1]王小谟.雷达结构与工艺(上、下册)[M].北京:电子工业出版社,2007:65-75.
[2]林有才.高机动性地面雷达的现状和未来发展趋势[J].电子机械工程.1999,81(5):11-14.
[3]张增太.机动式雷达自动架撤系统的结构设计[J].雷达科技与技术.2004,2(6):345-348.
[4]王劲宣.高机动雷达天线快速举升系统结构的总体设计[J].现代电子.2001,74(1):1-3.
[5]胡长明,等.从结构设计角度探讨车载对空情报雷达机动性、可靠性、维修性、保证性提高方法[J].电子机械工程.2005,21(1):1-4.
[6]许平勇,等.高机动雷达大中型天线高架机构液压系统设计[J].空军雷达学院学报.2004,18(4):10-13.
[7]RobertP.Scary.A Compact Thermal Control System. IEEE MTT-S Digest.1997:1492-1496.
[8]崔军华.重型越野汽车质量参数的确定[J].专用汽车.2006,(1):40-42.
猜你喜欢
防爆电机(2020年4期)2020-12-14
中国核电(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
专用汽车(2016年5期)2016-03-01
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16
专用汽车(2015年2期)2015-03-01
