基于双环轨迹跟踪控制的移动机器人控制器设计
2019-07-01 03:40周力夏愉乐唐慧
科技创新与应用 2019年18期
关键词:移动机器人
周力 夏愉乐 唐慧

摘 要:为实现稳定的内环滑膜控制,通过调整内外环控制增益系数,使其内环收敛速度远大于外环的收敛速度,即通过姿态角度θ快速跟踪θd使闭环系统的稳定得以实现。控制仿真结果表明该方法是一种可行、有效的寻优方法,这一控制方式使移动机器人系统具有良好的跟踪性能。
关键词:移动机器人;双闭环控制;轨迹跟踪;滑膜控制
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2019)18-0022-03
Abstract: In order to realize the stable inner loop synovial control, by adjusting the gain coefficient of the inner loop control, the convergence rate of the inner loop is much faster than that of the outer loop, that is, the stability of the closed loop system can be realized by quickly tracking θd through the attitude angleθ. The control simulation results show that the method is a feasible and effective optimization method, and this control method makes the mobile robot system have good tracking performance.
Keywords: mobile robot; double closed loop control; trajectory tracking; synovial control
1 概述
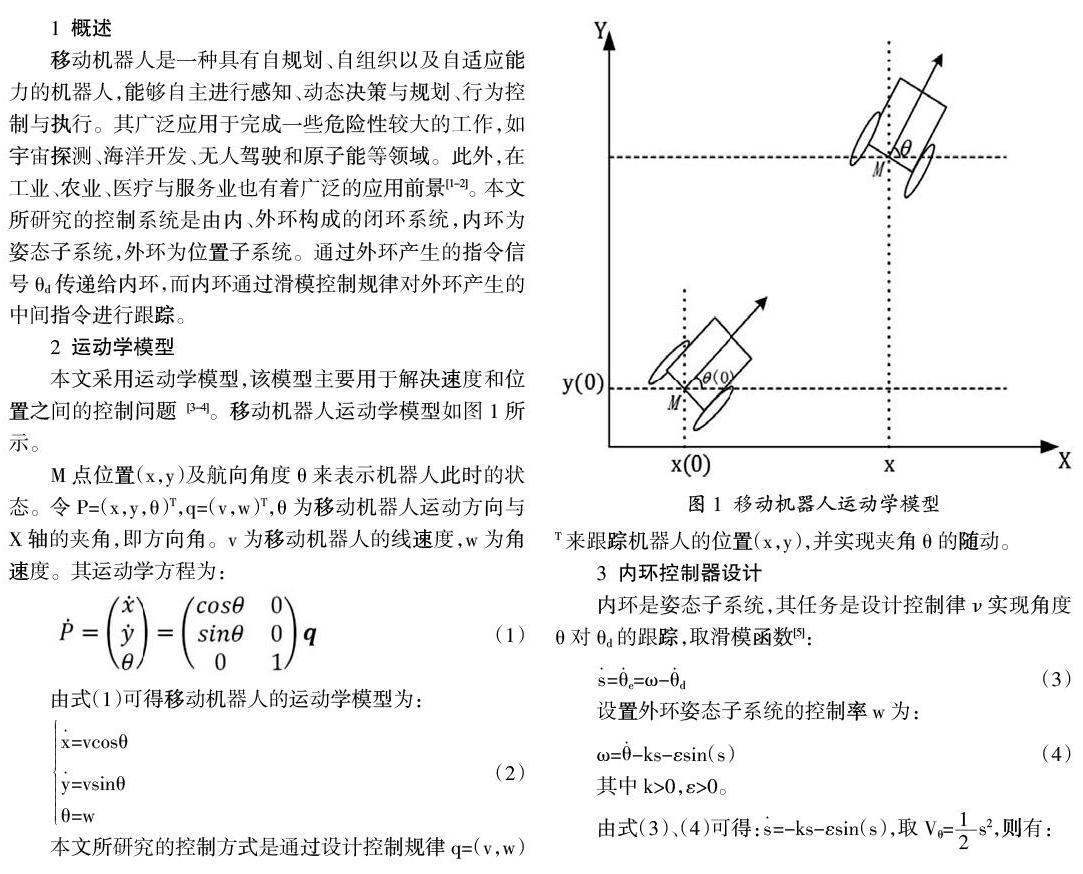
移動机器人是一种具有自规划、自组织以及自适应能力的机器人,能够自主进行感知、动态决策与规划、行为控制与执行。其广泛应用于完成一些危险性较大的工作,如宇宙探测、海洋开发、无人驾驶和原子能等领域。此外,在工业、农业、医疗与服务业也有着广泛的应用前景[1-2]。本文所研究的控制系统是由内、外环构成的闭环系统,内环为姿态子系统,外环为位置子系统。通过外环产生的指令信号θd传递给内环,而内环通过滑模控制规律对外环产生的中间指令进行跟踪。
2 运动学模型
6 结束语
本文针对移动机器人设计的双环轨迹跟踪控制器,使其能迅速对移动机器人的位置及航向进行跟踪,仿真结果表明,这一控制方式使移动机器人系统具有良好的跟踪性能。
参考文献:
[1]张启彬,王鹏,陈宗海.基于速度空间的移动机器人同时避障和轨迹跟踪方法[J].控制与决策,2017,32(2):358-362.
[2]刘国荣,张扬名.移动机器人轨迹跟踪的模糊PID-P型迭代学习控制[J].电子学报,2013,41(8):1536-1541.
[3]高峰.机器人跟踪控制方法分析与研究[J].科学中国人,2017(4Z):21-21.
[4]骆德渊,刘荣,李纪文.采用模糊逻辑的移动机器人轨迹跟踪[J].电子科技大学学报,2008,37(6):943-946.
[5]Sarkar S, Kar I N. Formation of multiple groups of mobile robots using sliding mode control[C]// Decision & Control. 2016.
[6]任国华.移动机器人轨迹跟踪与运动控制[J].机械设计与制造,2014(3):100-102.
[7]吴卫国,陈辉堂,王月娟.移动机器人的全局轨迹跟踪控制[J].自动化学报,2001,27(03):326-331.
[8]Yazdjerdi P, Meskin N. Fault tolerant control of differential drive mobile robots using sliding mode controller[C]// 2017 5th International Conference on Control, Instrumentation, and Automation (ICCIA). 2018.
[9]徐俊艳,张培仁.非完整轮式移动机器人轨迹跟踪控制研究[J].中国科学技术大学学报,2004,34(3).
[10]冯剑,张文安,倪洪杰,等.轮式移动机器人轨迹跟踪的PID控制方法[J].信息与控制,2017,46(4):385-393.
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
物联网技术(2017年3期)2017-03-30
物流科技(2017年3期)2017-03-29
现代电子技术(2017年4期)2017-03-23
现代电子技术(2016年23期)2017-01-12
电子技术与软件工程(2016年20期)2016-12-21
科学与财富(2016年28期)2016-10-14
企业文化·中旬刊(2015年12期)2016-03-09
软件导刊(2015年8期)2015-09-18