无拖曳航天任务检验质量的设计和比较
2019-07-12 08:09傅江良甘庆波赵柯昕
中国光学 2019年3期
傅江良,甘庆波,张 扬,赵柯昕,袁 洪
(1.中国科学院 光电研究院,北京100094;2.中国科学院 国家天文台,北京 100101;3.中国科学院大学,北京 100049)
1 引 言
无拖曳卫星的应用领域十分广泛,它不仅可以作为航天器导航系统的一部分,用于精密定轨和轨道预报,而且在地球科学、基础物理和天体物理等领域发挥着重要的作用[1]。
检验质量是无拖曳卫星的惯性参考,而检验质量在形状尺寸设计和材料选择方面因实际应用而异。在形状设计方面,检验质量多以对称结构为主,如立方体、圆柱体以及球体等。而在材料选择方面,低磁化率、高密度常被用来作为重要的评价标准。此外,相似任务或同一任务中检验质量的可选配置方案多样,如检验质量块的数目不局限于一个,同一航天器中可以采用两个甚至多个检验质量。随着空间引力波探测[2]、等效原理检验[3]、广义相对论基本假设的验证和效应的测量[4-5]以及地球重力场测量[6-8]等一系列科学实验的开展,检验质量的总体设计和相关配置选项的优选成为了这些无拖曳航天任务取得成功的关键。
对于同一个无拖曳任务,究竟采用何种形状的检验质量并没有明确的定论。如空间引力波探测计划LISA(Laser Interferometer Space Antenna)的基线设计[9]采用的是立方体检验质量,但之后为了简化设计,减少耦合误差,国外有学者开始重新探讨检验质量的设计方案。Benjamin Lange[10-11]早在2002年就对球形检验质量块用于LISA的无拖曳卫星进行了初步研究,并分析了用球形检验质量替代立方体检验质量的可能性。
检验质量总的无拖曳性能取决于所有干扰加速度项的总和。出于工程设计考虑,有时为了满足总的性能指标,可能需要对检验质量的某些设计项进行调整,如检验质量选择低磁导率的材料是为了降低由于磁效应产生的干扰,但它有可能增加引力梯度效应产生的干扰。干扰项与干扰项之间需要权衡,在符合总的加速度干扰性能要求的前提下,如何对干扰项进行误差分配,降低技术难点,也是目前检验质量研究的重点。
本文以等效原理验证和空间引力波探测等实验的检验质量为主要研究对象,首先介绍具体科学任务对检验质量形状的要求,分析其形状尺寸设计的基本准则和特殊考量,并针对圆柱体检验质量,给出其尺寸设计过程;然后从最大化科学信号强度和最小化噪声扰动这两方面分析无拖曳任务中检验质量的材料选择;最后又以LISA任务为例,对其检验质量的不同配置方案进行分析和权衡比较。
2 检验质量形状尺寸设计
检验质量的形状是根据具体的无拖曳任务需求来确定的,它取决于多种因素,其中干扰效应最小化、结构形式简单、易加工是几个重要的选择标准。检验质量的尺寸设计通常是一个多变量多目标的最优化求解过程,因此考虑采用控制变量、简化约束条件的方法来进行尺寸的初步确定。
2.1 科学任务对检验质量形状的要求
根据已有的无拖曳任务解决方案,总结几种常见的检验质量形状和构型,可以为今后新的科学任务提供参考。表1给出了目前已成功应用无拖曳技术的卫星实例及其对应的检验质量形状。在初步确定检验质量形状前,需要针对具体任务具体分析,因为不同任务的不同实验原理或观测手段往往限制了检验质量形状的选择范围。

表1 无拖曳卫星应用实例及其检验质量形状Tab.1 Application examples of drag-free satellite and their proof mass shapes
等效原理是爱因斯坦用于建立广义相对论的一个假设,它指出不同材料组成的物体在同一外部引力场的作用下,仍以相同的形式运动[12]。因此一些预言等效原理在较高精度尺度下不成立的理论认为,通过比较同一引力场中不同材料的检验质量的加速度差来检验等效原理是否不成立,典型的空间等效原理检验计划包括STEP(Satellite test of the equivalence principle)[13]、MICROSCOPE[14]和GG(Galileo Galilei)[15]等。
空间等效原理检验是一个对灵敏度要求极高的实验,因此如何让不同材料的检验质量同处于一个引力场中显得尤为重要。通过研究地球重力场模型知道,地球重力场在空间的分布无法用简单的规律来描述,而且这种分布并非静态,而是一个动态过程[16]。基于此,如果两个检验质量的质心明显不重合,或是存在质心偏移,但事先未曾测量出这一偏差并进行校准,那么就很难保证两个检验质量是受同一外部引力场作用。为了克服这一难题,一个有效的方法是采取嵌套结构的检验质量对,即一个质量块在另一个质量块里面,并设法使两个检验质量的质心重合,如采用一对同心的空心球体,或是两个同轴的空心圆柱体,如图1所示。
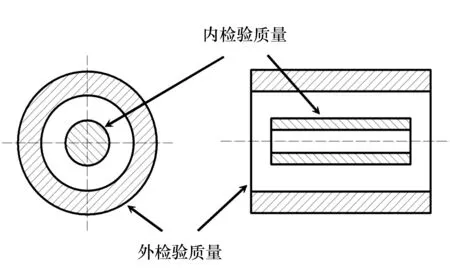
图1 空间等效原理实验的检验质量示意图Fig.1 Schematic of possible proof masses for test of equivalence principle in space
2.2 检验质量形状尺寸设计准则
选择检验质量的形状及尺寸时,除了要便于加工、降低控制和测量难度外,最主要的是要使所有可能的干扰效应对检验质量的影响最小化。
对于高精度的空间基础物理实验而言,必须考虑检验质量受到的各种干扰力,其中与检验质量形状尺寸密切相关的扰动项主要为外部引力源对检验质量的引力梯度效应。这里的外部引力源不仅包括中心天体,也包括航天器本体。事实上,只有将整个航天器设计成一个密度均匀的完美空心球体,航天器对检验质量的引力梯度效应才能完全消除[17]。显然这样的航天器设计是不切实际的,一个实际的做法是将与航天器控制系统无关的那部分质量尽可能地远离检验质量,如TRIAD I[18]整个卫星被分割成3部分,其中的大部分质量被转移到远离检验质量和控制系统几米外的地方。这种方式虽然提升了无拖曳整体性能,但是也暴露出诸多设计局限性,如增加了机构复杂度等。
无论检验质量最终选择何种形状,都需要确定周围航天器质量分布对检验质量产生的引力及梯度。因此,引力梯度效应最小化可以作为检验质量形状尺寸设计的准则或参考。实际情况下,由于存在加工和装配公差、材料密度分布不均以及精确零部件位置的不确定性而难以确定航天器对检验质量的引力。但在理论设计阶段,可以通过简化一些设计条件,如假设材料各向同性、结构对称分布来推导具体形状尺寸的检验质量由于引力梯度效应而产生的加速度扰动,检验质量尺寸的设计流程如图2所示。
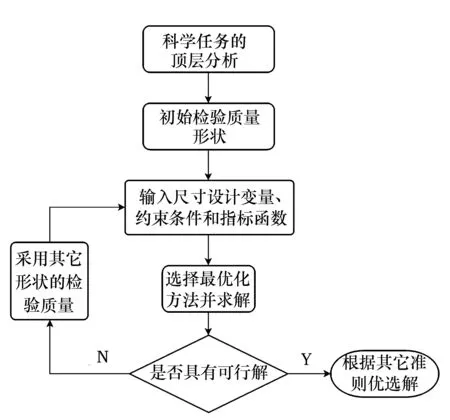
图2 检验质量尺寸设计流程图Fig.2 Size design diagram of proof mass
2.3 检验质量尺寸设计过程
球体和立方体检验质量的尺寸设计变量往往只有一个,如GP-B检验质量是一个直径为38 mm的球[19],LISA Pathfinder检验质量是一个边长为46 mm的立方体[20]。而圆柱体检验质量的设计变量较多,以下将介绍等效原理检验实验中圆柱体检验质量的设计过程。根据检验质量形状尺寸设计准则,综合考虑实际约束条件和加工测量的可行性,最终求得满足加速度性能指标的检验质量尺寸。
2.3.1 检验质量尺寸设计的代价函数
在检验等效原理的空间实验中,同轴的两个检验质量的轴线方向为其敏感轴方向,因此人们真正感兴趣的是检验质量轴向的加速度扰动。为了消除引力梯度的影响,理想情况下的检验质量应该是一对封闭的同心空心球体,但是鉴于实际测量的困难性,最终考虑选择嵌套的空心圆柱体
结构。
下面首先分析空心圆柱体检验质量受外部引力源作用而产生的引力梯度效应。为简单起见,假设检验质量密度均匀分布,外部引力源为单位点质量。
如图3所示,设空心圆柱体的内外半径分别为a和b,圆柱体长为2L,且圆柱体相对于对称轴(Z轴)的垂直中间平面是镜像对称的,那么以镜像对称平面与Z轴的交点O为原点,建立相应的圆柱坐标系OXYZ。
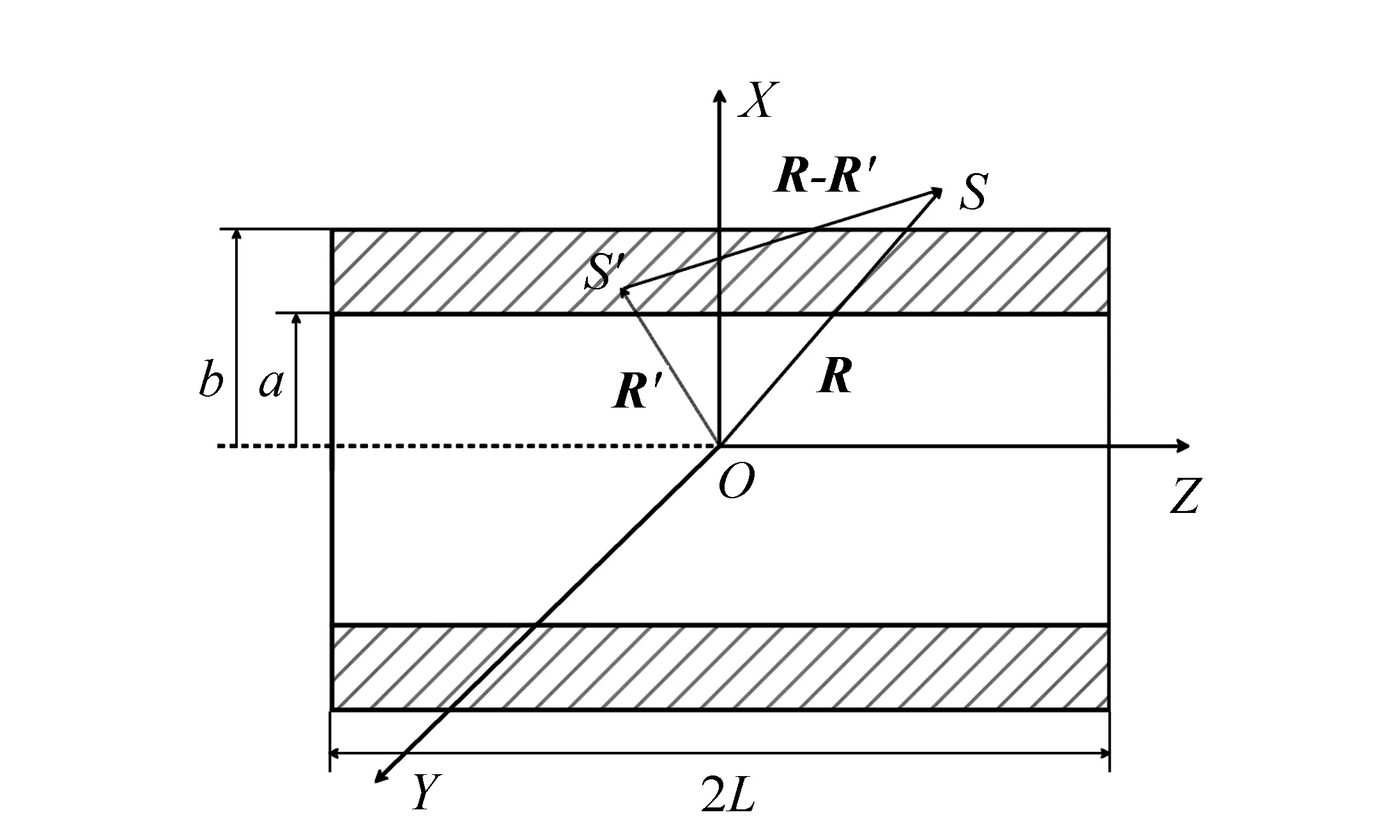
图3 空心圆柱体检验质量与点质量引力源的相互作用Fig.3 Gravitational interaction between a point source mass and the hollow cylindrical proof mass
考虑圆柱体外任意一个引力源S,其在圆柱体坐标系中的位置定义为R(r,θ,z),其中r和z分别为向量OS在X轴以及Z轴方向的分量,θ是OS在XZ平面的投影与正Z轴之间的夹角。同理定义圆柱体内任意一点S′的位置矢量R′(r′,θ′,z′)。那么有限长度的空心圆柱体由于单位点质量引力源的作用,在其轴向产生的加速度az可根据文献[21]表示为奇数阶勒让德多项式的级数项:
(1)
式中,G为万有引力常数;P2p+1为勒让德多项式;k2p为各级数项的权重系数,也被称为是依赖于检验质量形状和尺寸的几何形状因子,其大小为:
(2)
根据实验原理,检验质量之间的相对加速度差为实验的科学信号,因此这里将检验质量受外部引力源作用而产生的相对加速度差扰动作为检验质量尺寸设计的代价函数,其可以表示为:
(3)

2.3.2 检验质量尺寸设计的性能指标
结合式(1)和(3),内外检验质量的相对加速度差可以写成:

(4)

从式(4)中不难发现,可以通过两种途径来减小内外检验质量的加速度差:一是将检验质量尽可能地远离引力源,这样引力耦合项R-(2p+2)会随着距离的增加而急剧下降;二是通过对检验质量具体形状尺寸的优化设计来改变几何形状因子k2p的取值,从而减小引力耦合加速度大小,如当Δk2p=0时,其对应项引入的相对加速度差为0。
然而受航天器实际物理尺寸以及质量分布的限制,第一种途径对于绝大多数航天器设计并不适用,因此最小化几何形状因子之差Δk2p的幅值成为了解决上述问题的最佳途径,检验质量尺寸设计的性能指标初步为min(Δk2p)2。
2.3.3 检验质量尺寸设计的优化求解
将圆柱体几何形状因子k2p展开为:
(5)

(6)


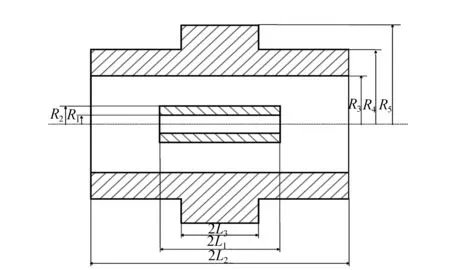
图4 环带形/直圆柱体混合结构的检验质量Fig.4 Proof masses with hybrid structure of ring-shaped/straight cylinder
根据图4中的尺寸标注,考虑一组设计变量X=[R1,R2,R3,R4,R5,L1,L2,L3]T,其中对于内检验质量,R1,R2,L1分别为直圆柱体的内径、外径和半长;对于外检验质量,R3,R4,L2分别为直圆柱体的内径、外径和半长,R5,L3分别为环带形圆柱体的外径和半长。

(7)

(8)

(9)
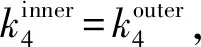
而对于k6项,则希望其最小化,结合上述分析的结果,对于一定约束条件下的等效原理检验质量对的尺寸设计,最终可以化为以下求解问题:
(10)
式中:Al是线性不等式约束的系数矩阵;Bl是线性不等式约束的上界;lb和ub分别为设计变量X的约束上下界。
考虑机械加工的实际情况,圆柱体检验质量的壁厚不能太薄,内外检验质量之间应存有一定的间隙,基于此建立相应的约束条件:
(11)
采用MATLAB优化工具箱中的fmincon函数对带有非线性约束的问题(10)进行求解,得到最终的优化结果为:X*=[4.503, 7.004, 11.511, 14.026, 23.794, 7.211, 33.344,16.220]T。
2.4 检验质量形状尺寸设计的特殊考量
以上求解得到的优化尺寸建立在检验质量结构形式简单、无加工尺寸误差、材料各向同性等假设的前提下,并未考虑零件局部特征、约束作用面影响以及主惯性矩等特殊要求。
2.4.1 约束作用面的特殊考量
对于超高精度的空间基础物理实验,需保证检验质量在其敏感轴方向是不受任何干扰力的,可一旦检验质量产生绕敏感轴方向的旋转运动时,就会将这种影响直接耦合到敏感轴方向上[22]。为了避免检验质量不产生绕敏感轴方向的旋转运动,有时需要施加某种约束如静电力矩来抑制检验质量的旋转,但是无论施加何种约束都需要保证在敏感轴方向检验质量是自由运动的。
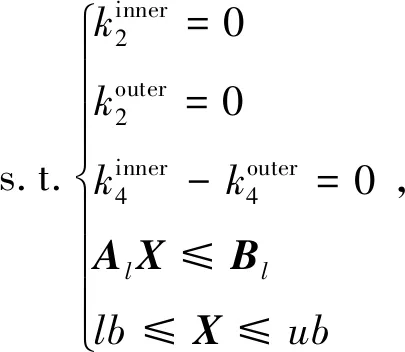
由于等效原理检验实验中采用的圆柱体结构的外表面是曲面,不易施加力矩,因此提出一种可供选择的方案,即在圆柱体检验质量的外表面切出一定数量的沿轴线方向的平面[22],用于增大约束作用面积,如图5所示。显然,这种方案的代价是破坏了检验质量原有的圆柱体结构,比较极端的情况是切除后的柱体表面都是平面,变成了棱柱体结构。
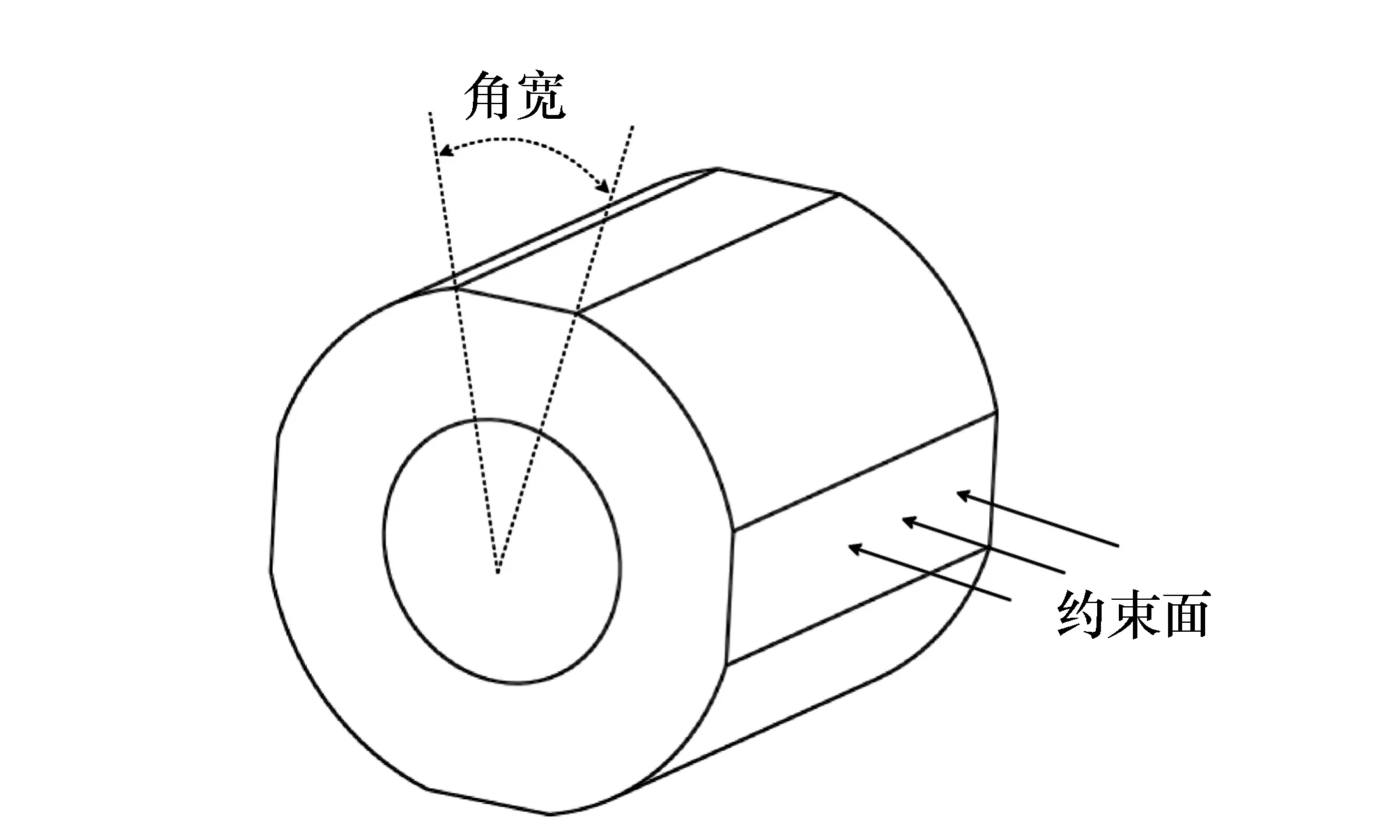
图5 带有平面的空心圆柱体检验质量Fig.5 A hollow cylindrical proof mass with ‘flats’
2.4.2 主惯性矩的特殊考量

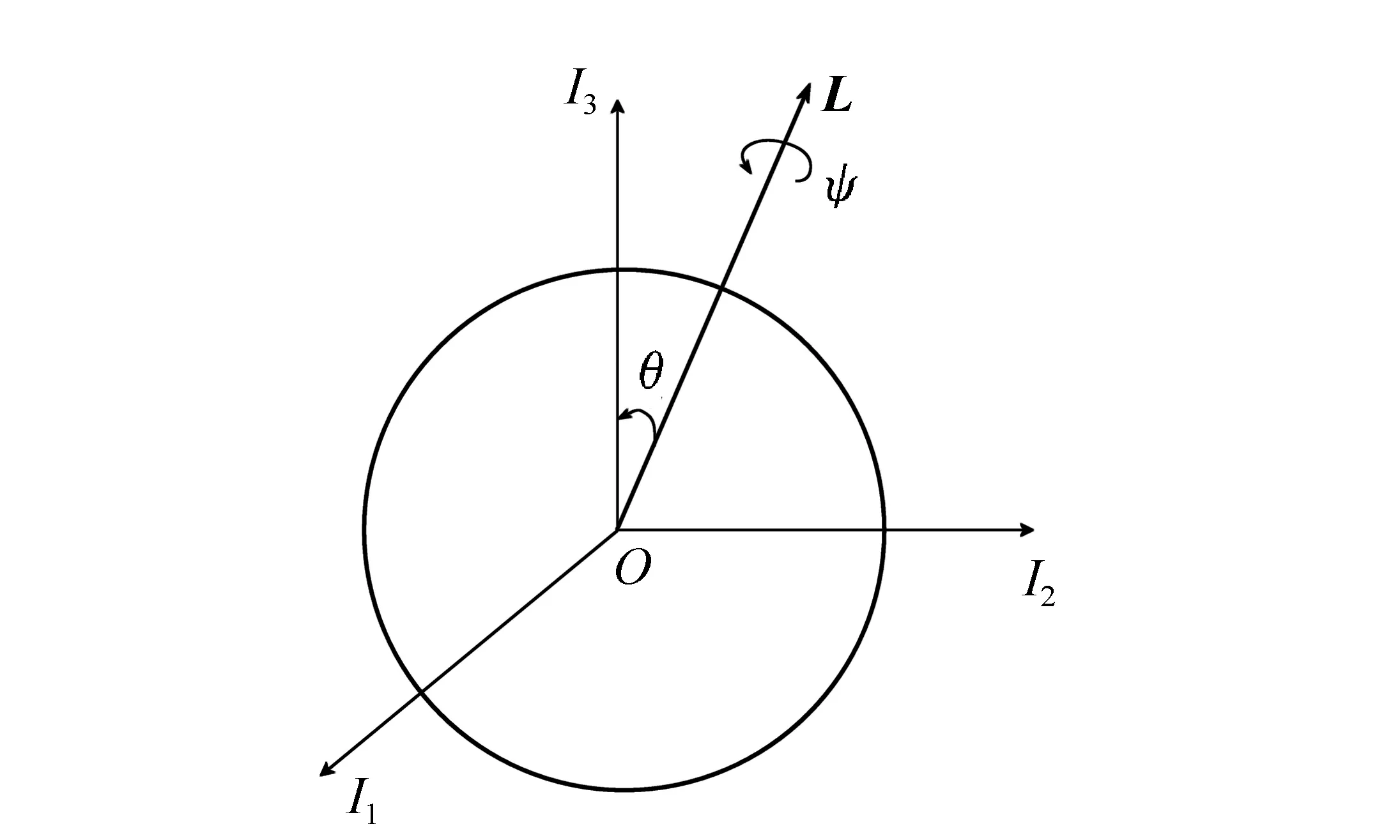
图6 球形检验质量的本体极迹运动Fig.6 Polhode motion of spherical proof mass
在科学任务阶段,希望检验质量的这种本体极迹运动能够完全衰减,否则它有可能构成一个新的噪声源。然而从GP-B实验的进展情况来看,球形检验质量本体极迹运动的衰减过程极为缓慢,因此如果在开始科学任务前这种运动没有完全衰减,则希望它的频率能在科学测量频带之外[24]。文献[25]在分析LISA球形检验质量方案时推导了本体极迹运动频率与主惯性矩之间的关系,提出采用部分镂空的球体结构,来使球体的一个主惯性矩比另两个的大10%,从而使本体极迹运动频率大于1 Hz(LISA的科学频段为100 μHz~0.1 Hz),如图7所示,整个球体结构由(a)、(b)、(c)3部分拼接而成。
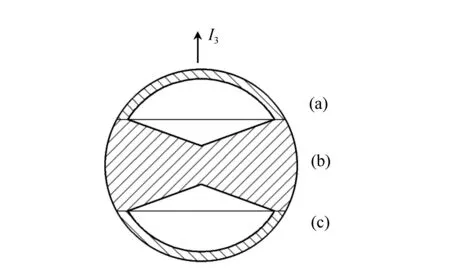
图7 部分镂空的球体结构Fig.7 Sphere structure with partial hollow
3 检验质量材料的选择
设计空间基础物理实验时,往往涉及到一个基本选择:最大化待测量的信号强度,或是最小化科学测量信号频段的噪声干扰。
对于空间等效原理验证实验,从理论学家的角度来看,原子的重子数、中子质子差以及结合能的性质是选择检验质量材料最重要的参考标准,这是因为一些预言等效原理破坏的理论指出这些基本参数可能是实验取得成功的关键[26]。因此可以通过对检验质量的材料进行组合搭配,使得等效原理破坏信号的强度最大化。然而对于验证爱因斯坦广义相对论的时空弯曲和坐标系拖曳效应实验而言,尽管这些效应在黑洞附近表现得十分明显,但在地球附近却是微乎其微。同样地由于距离引力波源过于遥远,以至于引力波在地球附近百万公里级臂长上经过时引起的臂长变化仅为皮米级[27]。这种情况下想要增大探测信号的强度变得尤其困难,因此为了得到较为理想的实验结果,只能通过最小化噪声干扰,并尽可能排除与真实信号频率相同的伪信号。
3.1 从最大化科学信号强度方面考虑材料的选择
根据空间等效原理验证实验的基本原理,至少需要比较两种材料检验质量的加速度。对于同一对检验质量,内外质量块的材料性质差异要尽可能大,这样才能使等效原理破坏的信号强度最大。在同一个实验中,通过比较多种检验质量块的材料组合可以得出较为可信的结论,但受限于航天器的有效容积以及设备的复杂程度,最早的STEP计划提出采用6对检验质量,但随后由于该计划一度推迟,相应地改成了耗资较小的STEP缩减版[28],其检验质量也从6对缩减为4对,MICROSCOPE和GG计划也均只有2对检验质量。
然而一个好的实验设计需要有测量冗余和对照组,这进一步限制了可供测试的材料数量。目前STEP计划的4对检验质量材料分别为Pt/Ir、Be和Nb的组合[29],其中3组互为对照,另外一组为测量冗余。MICROSCOPE计划中检验质量的材料分别为Pt和Ti、Pt和Pt的组合[30],除了以上材料,还可以选择Si、Ba等相对参数差异较大的材料。
此外在优选检验质量的材料时,除了理论方面的考量,还需要综合实验方面的需求,比如材料的密度、磁化率、热膨胀系数、机械可加工性、适当的强度和硬度、价格等因素。
3.2 从最小化噪声扰动方面考虑材料的选择
正如在选择检验质量形状、进行尺寸设计时,最主要的目的是最小化检验质量上的干扰效应,选择合适的材料对于最小化噪声干扰也是极其重要的。LISA的干扰补偿系统要求中分析了15项可估计的直接作用在检验质量上的扰动,其中4项与磁场效应有关的,3项由宇宙射线、残余气体分子、激光光子撞击导致,3项由温度扰动引起,另有5项来自于检验质量与周围电极之间的电压和电荷扰动[31]。综合考虑材料的自身属性,以及选择合适的表面涂层,可以降低这些环境干扰项对检验质量带来的影响。
3.2.1 检验质量自身材料属性的考量
地球磁场和太阳磁场对于近地航天器而言是最主要的外部干扰源之一。航天器腔体的一个主要作用就是为了屏蔽这些外部磁场的干扰,一般通过在腔体外表面进行镀膜,就能使目标衰减因子达到0.01,即腔体内外磁场之比为1∶100[32]。可即便有如此充分的保护,航天器内部的磁场控制却是一个不小的挑战,这是由于航天器内部的一些永磁材料以及电子系统也会产生磁场。环境磁场引入的加速度扰动与检验质量的磁化率、密度等相关,为了最小化星际磁场以及卫星内部磁场梯度产生的磁场环境扰动的影响,通常在选择检验质量材料时需要考虑材料的磁化率和密度。选择高密度、低磁甚至接近零磁的材料可以最小化磁场的干扰。
一些与碰撞相关的干扰如残余气体对检验质量的干扰,其产生的加速度扰动与检验质量的面质比有关,故而在检验质量的质量一定的条件下,选择高密度材料能减小检验质量的几何尺寸,从而减缓这些干扰力的影响。
Au-Pt合金由于其高密度、低磁化率以及耐振动冲击的性质,通常用作无拖曳任务中检验质量的材料,典型应用如TRIAD Ⅰ、LISA Pathfinder等。不足之处在于当检验质量尺寸增大时,Au-Pt合金的检验质量在冷却过程中,Au和Pt易分离,从而导致检验质量密度不均匀并偏移零磁化率点[33]。此外,Au-Pt合金的硬度不高也使得检验质量加工变得复杂,在载荷发射阶段检验质量通常需要进行锁紧,因此材料过软容易使检验质量表面损伤。其它的合金材料如Be-Cu合金,其磁化率也几乎为零,尽管其密度低于Au-Pt合金,但硬度却有所提高,因此也可以作为检验质量材料的备选。
检验质量周围温度分布不均匀会产生温度梯度场,由此产生的一些温度效应会对检验质量产生干扰。膨胀或者收缩都会引起检验质量在特定方向上的尺寸变化,如果这种变化是非线性的,就会增大检验质量质心和形心的偏差,使检验质量产生额外的加速度干扰。高能宇宙射线能穿透航天器腔壁,检验质量由于吸收部分高能粒子的能量,也会发生热变形,引起的位移变化与材料的热膨胀系数、比热容等有关。Au-Pt合金的另一个缺点是它的热膨胀系数较大,传统的低膨胀玻璃如石英玻璃的热膨胀系数在室温下约为5×10-7/K,超低膨胀玻璃ULE的热膨胀系数仅为10-8/K,而Au-Pt合金的热膨胀系数相当于ULE的1 000倍[9]。
3.2.2 检验质量表面镀膜材料的选择
航天器在运行过程中会受到高能粒子的影响,这些高能粒子直接或间接地给检验质量带上电荷,导致检验质量电荷积累速率以大约每秒50个电子在变化[34]。此外检验质量锁紧和释放的过程也会留下残余电荷。这些电荷随时间逐渐累积,并产生静电力,不可避免地会对科学测量和无拖曳控制的信号造成干扰。紫外LED因其体积小而轻,功耗小,动态范围宽,常被用于检验质量的电荷管理,其基本原理是靠光电效应实现的。当采用255 nm的紫外LED源时,电子的逸出功为4.86 eV,这也决定了待选材料逸出功的上界。低磁化率的Au-Pt合金检验质量会引起特别高的功函数,因此需要在检验质量表面镀膜,备选材料有Au、Nb、TiC等。
检验质量表面镀膜还有其它作用,GP-B任务中采用熔融石英球作为检验质量,其表面镀了一层很薄的超导铌材料,不仅可以避免电荷在球表面的不均匀分布,同时也便于超导量子干涉设备 (SQUID)进行信号测量及用作静电悬浮[35]。但如果涂层不均匀,则会影响GP-B转子的圆度,而且铌的密度与石英不同,涂层的存在也会导致质量分布不均匀。
此外,检验质量涂层材料还应具备以下特征:
(1)作为保护层,即在检验质量锁紧和释放以及与内腔壁可能发生碰撞的期间能够使检验质量保持表面结构特性;
(2)与检验质量强黏附,与内腔壁黏附最小;
(3)不易分解,因为当涂层发生分解时,会对结构产生较大的应变。
4 检验质量配置方案的分析与比较
同一无拖曳航天任务中检验质量的构型、数量以及状态的测量方式可以有多种选项,这些不同选项之间的组合又可以产生多种配置方案,通过对这些配置方案的权衡取舍和比较研究,可以为将来类似的科学任务提供最佳的解决方案。以下将以空间引力波探测任务为例,分析与比较检验质量可能的配置策略。
4.1 空间激光干涉引力波探测计划
上世纪70年代末以来,人们提出了许多不同的空间引力波探测想法,并深入研究了其各种配置。LISA原是美国航空航天局(NASA)和欧洲航天局(ESA)合作的一个空间引力波探测项目,旨在探测地基系统无法覆盖的低频(0.1 mHz~0.1 Hz)引力波[36]。LAGRANGE计划[37]是由美国斯坦福大学和NASA等机构共同提出的一项新的空间引力波探测计划,不同于LISA,LAGRANGE的3个航天器分布在地月L3、L4和L5三个拉格朗日点。日本也提出过其未来的空间引力波探测计划DECIGO[38],该计划的科学测量带宽为0.1 Hz~10 Hz,旨在为LISA测量频段和地基系统测量频段之间的缺口搭起桥梁。中国在引力波探测方面虽然起步较晚,但有望在未来与国际接轨。2016年,中国科学院公布了其空间引力波探测项目“太极计划”[39],中山大学也提出了“天琴计划”[40],表明我国在未来数十年的空间引力波探测有了明确的发展路线。
4.2 LISA检验质量配置方案分析
LISA是最早开展的空间引力波探测项目,作为LISA无拖曳卫星的核心部件,引力参考敏感器[36](Gravitational Reference Sensor,GRS)的配置一直是讨论和研究的焦点,其中就包括对检验质量形状和数量的选择,此外检验质量相对运动状态的测量究竟是采用静电方式还是光学方式仍莫衷一是。从已发射的LISA Pathfinder来看,目前LISA还是会沿用两个立方体检验质量块和静电悬浮测量系统的基线设计方案。但考虑到将来可能会有比LISA要求更为严苛的空间引力波探测任务[41],斯坦福大学从2003年开始就重新探讨了LISA GRS设计方案,并于2004年提出模块化引力参考敏感器[42](Modular Gravitational Reference Sensor,MGRS)。MGRS的一个最主要特点是只采用单个球形检验质量,并增大了检验质量与周围腔体之间的间隙,同时抛弃了原来的静电测量方式,改用扰动更小的光学测量方式。
通过对LISA科学任务的分析可知,LISA的检验质量对形状并没有特殊要求,一般如球体、立方体、长方体甚至圆柱体均可以作为候选。若只针对技术较为成熟的球体和立方体检验质量,再将其数量、相对运动状态测量方式等选项考虑在内,则LISA检验质量的配置方案可以演化成以下4种[43],如表2所示。
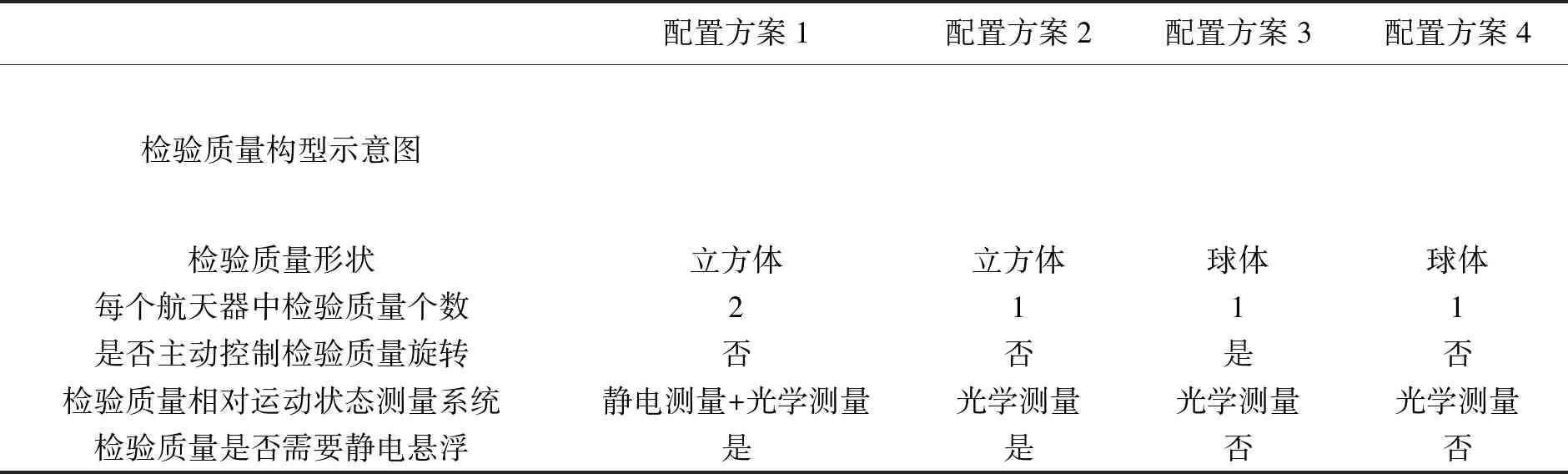
表2 LISA检验质量的4种配置方案Tab.2 Four configurations of LISA proof mass
配置方案1为LISA的基线设计,其中每个航天器均采用两个立方体检验质量,每个立方体的一个面各自指向与之对应的临近航天器。检验质量与航天器腔体之间的相对位置测量结合了静电和光学两种测量方式,静电悬浮系统则用于对检验质量的姿态进行控制。配置方案2是LISA基线设计的一种变体,其每个航天器只包含一个立方体检验质量,单个检验质量可以同时作为两个视场方向的惯性参考,此外检验质量的运动状态在所有自由度上都将采用光学测量方式,但检验质量的姿态仍需采用静电悬浮系统来维持。配置方案3和4都只用到了单个球形检验质量,由于球体的姿态指向不变,因此无需采用静电悬浮系统进行姿态控制,且检验质量和腔体之间的相对位置测量采用多种光学传感器读出。这两种方案的区别在于方案3考虑了球体检验质量因质心和形心偏离以及球体表面不圆度带来的误差,希望通过以高于科学测量频段的频率旋转,将误差干扰频段移出任务频段。
4.3 不同配置方案的权衡比较
检验质量的形状本身就会带来一些问题,规则实体像圆柱体和立方体是很好的人工制品,因为它们的尺寸和体积很容易精确测量。然而这些形状也有一个缺陷,那就是它们有尖锐的边角,这使得加工变得困难,而且又容易损坏,边角的损伤会直接造成体积的不确定性。假如圆度误差可以忽略,那么球体则是一个比较理想的选择,因为它没有边角,而且体积又可以通过直径来确定。但如果考虑到球体的本体极迹运动,则会因为主惯性矩要求而破坏球体的完美构型。
检验质量的数量受限于航天器的有效容积以及设备的复杂程度,采用单个检验质量能降低整体载荷设计难度,但是由于一个检验质量要同时作为LISA一个航天器两个视场方向的惯性参考,一旦单个检验质量失效,则会对整个任务造成重大影响甚至迫使任务终止。而两个检验质量的好处在于其相对独立,即使一个激光干涉臂出现问题,并不会对邻近的干涉臂造成影响。
检验质量的形状和数量也会对传感器测量方式的选择、锁紧机构的设计等方面造成影响,因此需要对不同配置方案中各选项进行权衡比较。一般可根据加速度噪声性能指标、方案继承性和技术成熟度、无拖曳控制复杂度等方面来评判某一配置方案的优劣。
4.3.1 加速度噪声性能指标
检验质量在敏感轴方向的加速度噪声是衡量不同配置方案优劣的关键。文献[43]将检验质量加速度扰动项分解为4大类,分别为检验质量环境扰动、与刚度相关的噪声、传感器引入的噪声以及静电悬浮系统带来的噪声。根据这种分类,不同配置方案下检验质量加速度噪声分布如表3所示。

表3 LISA不同配置方案中总的加速度噪声比较Tab.3 Comparison of the total acceleration noises for four LISA configurations

LISA的设计目标是将检验质量总的非引力干扰加速度控制在3×10-15ms-2Hz-1/2以内,因此这4种配置方案都能满足LISA的要求,但配置方案3的指标最优,几乎比配置方案1提升了1倍。溯其根本,这是由于球形检验质量无需静电悬浮系统进行姿态控制,因此相应的δaf=0。此外由于检验质量和航天器腔壁间隙越大,非引力干扰就越小,但实际情况下静电测量会受到间隙限制,而采用光学测量则不存在这种问题,其测量噪声可忽略不计。
4.3.2 方案继承性和技术成熟度
目前检验质量主要是沿袭两套体系:一套是以ONERA[44]研制的高精度空间静电加速度计为基础的长方体检验质量,另一套是以早期斯坦福大学为TRIAD I卫星研发的干扰补偿系统[45](Disturbance Compensation System,DISCOS)为基础的球形检验质量。
ONERA空间静电悬浮加速度计已有40多年的研制历史,它采用长方体作为检验质量,不仅可以精确测量卫星各个轴上的线性加速度,同时也能测量相应轴的角加速度。以STAR、SuperSTAR和MicroSTAR为代表的空间加速度计已被广泛用于地球卫星重力场测量任务中。正是基于这种成熟的技术和成功的案例,LISA Pathfinder采用了立方体检验质量作为无拖曳卫星的惯性参考。
球形检验质量的应用代表为GP-B陀螺转子,为最小化检验质量噪声干扰,GP-B团队制造了一个近乎完美的球体。球形转子的内部物质是均匀分布的,误差不超过百万分之二,且其表面不圆度小于20 nm[46]。这种超精密加工技术为今后无拖曳任务采用球形检验质量提供了技术保障。
其它形状检验质量的方案可能也符合任务需求,但伴随而来的是各种技术难点,因此基于方案继承性和技术成熟度,立方体和球形检验质量是不错的选择。
4.3.3 无拖曳控制复杂度
LISA任务中需要控制的总自由度数决定了动力学模型的控制复杂度。配置方案3和4中,球形检验质量由于姿态无需控制,因此只有3个平移自由度,加上航天器本身的6个自由度以及望远镜的1个自由度,单个航天器仅有10个自由度,3个航天器组成的星座总共为30个自由度,相比于LISA基线设计中每个航天器都含有两个立方体质量块,自由度数量减少很多。

表4 LISA不同配置方案中控制自由度数量比较Tab.4 Control DOF count comparison for four LISA configurations
表4总结了LISA不同配置方案下的控制自由度总数,很明显采用球形检验质量以及减少检验质量的个数都有利于简化任务的控制难度。
5 结 论
本文针对无拖曳航天任务中检验质量的设计问题,以具体的空间科学任务为例,给出了检验质量从形状尺寸确定、材料选择到具体配置选项优选的设计流程和方法,该设计方法可以为未来无拖曳航天任务检验质量的模块化设计提供参考。
(1)具体的科学任务会限制检验质量形状的选择范围,引力梯度效应的最小化可以作为检验质量尺寸初步设计准则,在综合加工、测量以及一些特殊考量后,最终需要对确定形状尺寸的检验质量进行所有非干扰加速度项的计算,以验证是否满足总的性能指标。
(2) 检验质量的材料通常是根据最小化干扰噪声的准则来选择的,一般需考虑材料的磁化率、密度、热膨胀系数等属性。
(3)检验质量的配置方案可根据加速度噪声性能指标、方案继承性和技术成熟度、无拖曳控制复杂度等方面来综合评价,并以此选择最佳方案。
猜你喜欢
国际太空(2022年7期)2022-08-16
振动与冲击(2022年1期)2022-01-27
国际太空(2019年9期)2019-10-23
小学生学习指导(高年级)(2019年6期)2019-06-01
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
小天使·五年级语数英综合(2016年12期)2016-12-09
娃娃画报(2016年6期)2016-07-29
中学生数理化·八年级数学人教版(2016年3期)2016-04-13
小朋友·聪明学堂(2015年7期)2015-11-30