
机械通气应用发展简述
2019-07-23 07:34李潘宇
外科研究与新技术 2019年2期
李潘宇
上海交通大学医学院附属第九人民医院资产管理处,上海 200011
1 机械通气结构和原理
呼吸机是一种能够人工替代自主呼吸功能的设备,在患者正常生理呼吸无法代偿或满足机体需要时,给予部分或全部通气支持,以达到维持肺泡通气、改善氧合、维持或增加肺容积以及降低呼吸功耗的目的。呼吸机通过控制系统对气流流向进行控制,从而完成通气周期。机械通气时,机械驱动使气道口和肺泡产生正压差,而呼气时在胸廓及肺弹性回缩力作用下,肺泡压力高于与气道口从而产生气流呼出。
呼吸机按照动力来源可分为气动呼吸机、电动呼吸机和电控气动呼吸机。前两种呼吸机由于控制系统简单、触发灵敏度低,同步性较差,使用受限制。现下院内尤其是重症监护病房、呼吸科等科室普遍使用电控气动呼吸机,可用于新生儿、儿童和成人。此类呼吸机通常需要外接氧气源和空气源,采用微电子控制系统,利用高精度的流量、压力传感器和灵敏的控制阀门完成吸气阀、呼气阀的灵敏切换,从而完成整个机械通气过程。呼吸机的主机由控制电路、机械运动部件及气路组成,它把空气和氧气混合,按照设定参数及呼吸模式,给患者送气(图1)。
2 机械通气模式
呼吸机的通气模式按送气方式的不同,可分为容量控制通气、压力控制通气和支持自主呼吸模式三大类(表1)。无论是容量控制通气还是压力控制通气模式,均为时间触发和时间切换。传统的容量控制通气是以容量为预设目标,以固定的时间间隔和恒定气流输送目标潮气量。它具有潮气量稳定的优点,不会因患者呼吸功能变化而变化,但可能出现较高的气道峰压。如果设定的流速不能满足患者需求,可能出现“吸气饥饿”导致人机对抗。压力控制通气则是以吸气压力为预设目标,以固定时间间隔和减速气流方式进行送气,更符合生理需求,吸气峰压较低,但输送的潮气量会随患者呼吸阻力或顺应性改变而波动。
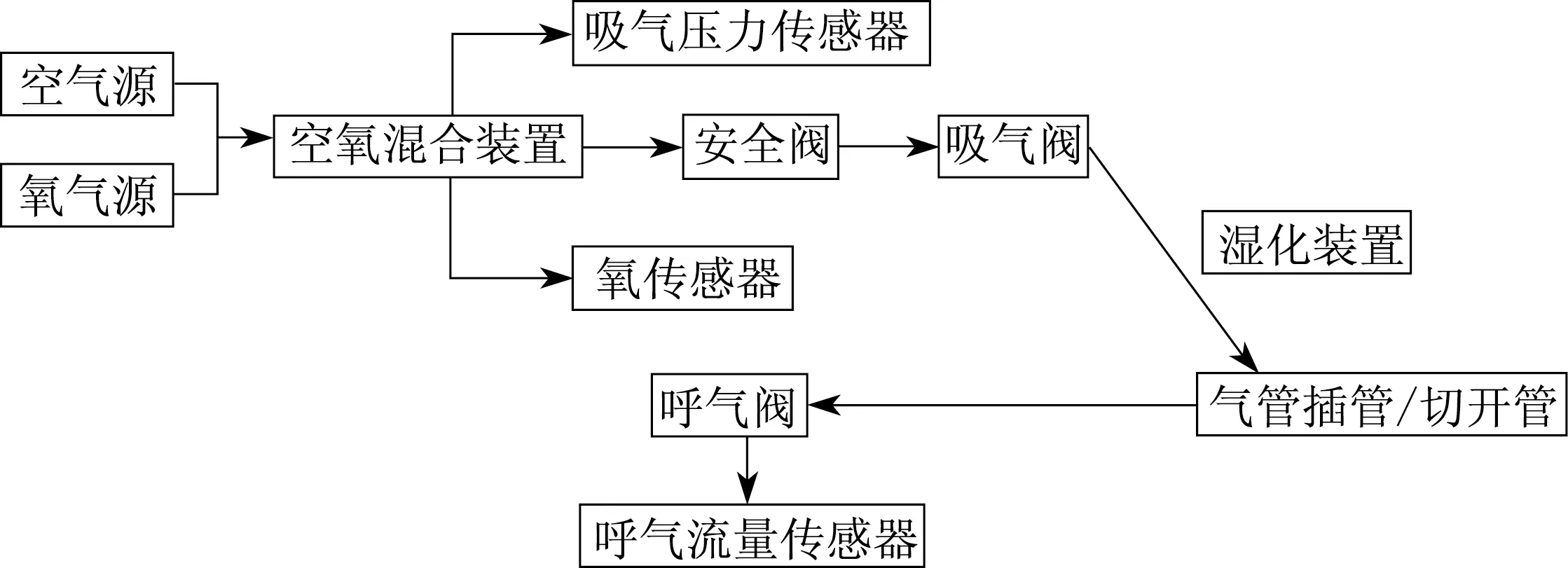
图1 呼吸机气路示意图
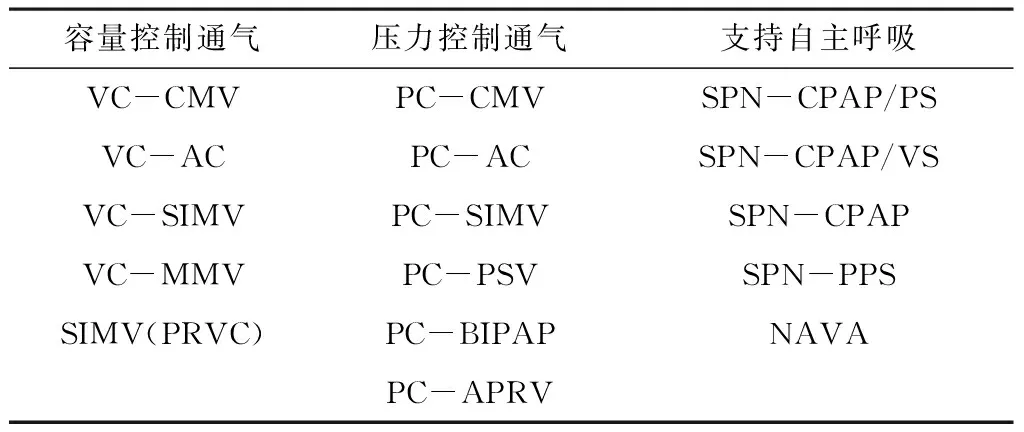
表1 呼吸机常用通气模式
自主呼吸模式为流速或压力触发、流速切换。患者吸气努力达到触发阈值,呼吸机即给予压力支持或容量支持通气,当吸气流速下降到峰流速的设定百分比后,即转为呼气。此类模式下患者需要有相对规律的呼吸节律、一定的呼吸肌肉力量,因而常作为脱机过渡模式。该模式需要设定触发水平和窒息报警,以保证患者通气安全。
3 新型通气模式
3.1 气道压力释放通气(airway pressure release ventilation, PC-APRV)
气道压力释放通气模式是指在持续气道正压下伴有短暂压力释放的自主呼吸模式。与自主呼吸模式下的持续正压、压力支持(CPAP/PS)模式不同之处在于APRV带有间歇性的压力释放,通过这一压力释放使得APRV具备压力控制通气的效果,无自主呼吸的患者也可应用APRV通气。该模式下需要设置高压水平Phigh、高压维持时间Thigh、低压水平Plow、低压维持时间Tlow(图2)。由Phigh设置压力维持Thigh时间共同组成的为患者吸气末肺容积状态;由释放压力Plow及释放时间Tlow共同组成的为患者呼气末肺容积状态。APRV通过维持较长时间的正压,可逐步打开塌陷肺区域,改善肺顺应性,增加并稳定肺容积。而通过短暂的压力释放,患者可获得一定潮气量,同时释放呼出CO2,并由于释放间期极短,肺内存在较高内源性PEEP,可维持呼气末肺容积的稳定。此外,APRV全程支持患者自主呼吸。无论在呼吸周期的吸气或呼气阶段,呼吸机的吸气阀及呼气阀都会根据探测的吸气或呼气流速变化,按比例浮动调节阀门大小,从而根据患者实际的呼吸流速进行调节。Habashi等[1]在两次打击造模后,早期分别给予试验动物APRV或小潮气量通气(6 mL/kg)48 h,APRV组的气体交换、顺应性明显优于小潮气量组,未见明显肺损伤,提示早期应用APRV有可能预防急性呼吸窘迫综合征(ARDS)。临床研究中发现早期应用APRV能够显著缩短ARDS的机械通气时间[2]。
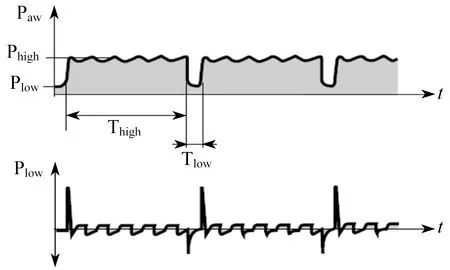
图2 气道压力释放通气模式示意图
3.2 成比例压力支持(proportional pressure support, SPN-PPS)
成比例压力支持通气是指具有成比例流速和容量支持的自主呼吸模式。呼吸机自动监测患者呼吸流速,根据自主呼吸流速大小给予成比例的流速及容量支持。PPS下的支持程度可按照患者肺部条件分别设置。如患者通气障碍主要由气道阻力造成,则可设置较大的流速支持(flowassist),如患者的通气障碍主要由于肺顺应差造成,则可设置较大的容量支持(volume assist)。通过流速和容量支持的叠加,以及根据自主呼吸流速自动调整支持比例,PPS可给与患者最为接近生理呼吸的正弦波式送气流速(图3)。该模式能很好解决PSV通气时人机不协调的问题,减少支持不足和支持过度的发生,改善肺力学和气体交换效率,提高患者的通气舒适程度。

图3 成比例压力支持通气示意图
3.3 可变压力支持通气(variable PS/noisy PSV)
可变压力支持通气是指在持续正压,自主呼吸支持通气基础上,对压力支持水平进行一定程度的随机变异,以帮助患者获得近似于生理呼吸的潮气量变异度。根据设置的变异百分比,压力支持水平出现不同程度的变异(图4)。变异均符合正态分布,与生理呼吸的潮气量变异度相符合。在ARDS的动物模型中发现,可变压力支持通气通过降低通气区域的平均气道压、促进塌陷肺泡区域的复张,从而降低肺血管阻力,让重力依赖区域的血流向非重力依赖区域,进行重新分布,进而改善通气血流比例,更有利于气体交换。由于产生潮气量变化更符合生理,在临床研究中发现其较传统PSV有更好的人机同步性[3]。
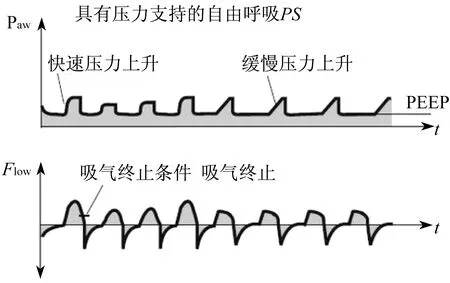
图4 可变压力支持模式示意图
3.4 神经调节辅助通气(neurally adjusted ventilation assist, NAVA)
神经调节辅助通气是通过监测膈肌电活动,感知患者自身的实际通气需要,并根据膈肌电活动信号(EAdi)的强度实时提供一定比例的通气支持。NAVA通气时触发、吸呼气切换以及辅助水平调节直接取决于患者膈肌电活动的变化,在理论上它能尽量解决传统机械通气时人机不协调、过度辅助等问题。这方法与传统的PSV相比,NAVA在吸气触发延迟、呼气触发延迟和人机同步性上的表现都更加好一些。
4 机械通气未来发展趋势
4.1 肺保护性通气策略
ARDS是严重威胁患者生命安全的疾病,其病死率高于40%[4],呼吸支持是当前ARDS治疗的主要手段,然而不当的机械通气甚至可能导致或加重呼吸机相关肺损伤(ventilator-induced lung injury,VILI)。VILI是机械通气最严重的并发症之一,本质原因是由于肺泡容积或肺泡的跨壁压力过大,因此机械通气的治疗策略主要包括限制平台压或小潮气量通气、肺复张、以及采用适当的PEEP,目的是尽量控制肺泡的形变,并减少肺泡反复塌陷复张所产生的剪切力损伤。小潮气量通气(4~6 mL/kg IBW)、控制平台压<30 cmH2O(1 cmH2O=0.098 kPa)被证实能降低ARDS患者的病死率。然而ARDS患者肺部病变存在不均一,由于个体患者肺顺应性和可复张容积的不同,单一标准的小潮气量通气很难真正实现肺保护。Amato等[5]发现在不同的潮气量与PEEP组合中,气道驱动压是与ARDS患者预后相关的主要因素,预示未来以气道驱动压为标准进行小潮气量通气可以更好的实现潮气量的个体化。此外,通过近期的研究发现肺复张后运用高PEEP并不能改善病死率,这可能与复张前没有评估肺的可复张性有关,所以临床需要更加个体化的评估不同患者肺的可复张性。我们通过运用一些新型的肺部通气监测技术,如胸阻抗断层成像技术等能够在床旁实时连续地监测肺内区域通气分布,帮助评估肺复张效果,指导个体化的PEEP设定[6]。
4.2 人机更同步
人机不同步是临床常见的问题,呼吸机相关因素约占人机对抗的1/3,究其原因主要有模式及参数设置不当、触发灵敏度不当导致触发困难或误触发、管路漏气等。目前由于流速触发较压力触发更为敏感,临床大多已弃用压力触发而采用流速触发。新型通气模式NAVA根据膈肌电活动调节吸气触发和吸呼气转换,可进一步缩短响应时间,尤其对于存在内源性PEEP的COPD患者能够显著降低吸气做功[7]。随着伺服技术和闭环通气模式的出现,呼吸功能够自动针对一个或多个变量进行连续调控,迅速而精确地控制输出变量,减少支持过度和支持不足的风险,例如成比例支持通气、分钟指令通气、适应性支持通气等。在送气方式上,传统的容量控制通气采取恒流方波进行送气,不符合生理呼吸特征,新的通气功能autoflow、PRVC模式等兼顾了容量和压力目标,根据患者当前的气道阻力和顺应性大小,采用减速气流输送目标潮气量,大大提高了舒适度,改善人机同步性。
4.3 序贯通气治疗理念
高流速氧疗-无创通气-有创通气序贯治疗近年来得到越来越多的关注。长时间机械通气往往合并呼吸机相关性肺炎、膈肌功能障碍等一系列并发症,消耗了大量的医疗资源。机械通气患者中呼吸机肺炎的发病率为9.7%~48.4%,病死率则高达21.2%~43.2%[8]。高流速氧疗是通过特制鼻导管提供加温加湿的高流速氧气(一般为40~60 L/min),满足患者吸气需求的一种新型疗法,能够降低严重低氧血症患者的90 d病死率[9]。无创通气被证明对于某些类型的急性呼吸衰竭,例如慢性阻塞性肺病以及慢性呼吸衰竭急性加重患者中,能显著缩短有创机械通气时间,减少并发症。研究显示,有创-无创序贯通气治疗科明显缩短有创机械通气时间,降低VAP发生率,缩短ICU住院时间,并可能降低病死率[10]。一些高端呼吸机已经把氧疗、无创通气和有创通气整合在一台呼吸机上,无需更换设备,即可根据患者病情变化需要灵活选择所需治疗,减少了反复更换设备的不便,降低了交叉感染的风险。
4.4 智能化决策支持
目前机械通气参数的调整主要依靠临床医护人员对患者进行评估实时调整,这种做法无形中增加了医护人员的负担。Smartcare是一种由计算机控制的自动化脱机软件。呼吸机通过模拟医师实施机械通气的过程,获取患者的潮气量、自主呼吸频率和呼气末二氧化碳分压等信息,自动调整呼吸支持力度,直至压力支持水平降低到一定程度后患者呼吸仍稳定,此时呼吸机将提示医师可考虑脱机。研究证实Smartcare能够缩短机械通气时间33 %以上,缩短脱机拔管时间40 %以上,这大大简化了工作流程。未来,随着人工智能技术的发展和进步,机械通气在智能化决策、人机交互等方面必将更加的完善。
4.5 个体化精准医疗
精准医疗是未来医学发展的必然方向。精准医疗应当从患者获益最大化和医疗资源的高效益双重目标的角度,有针对性地对疾病进行预防和治疗,这离不开先进的诊断工具。目前重症患者的机械通气治疗仍然存在参数设定缺乏个体化、对患者肺通气情况缺乏有效的监测等问题,不利于改善患者预后。如今,高度智能化的呼吸机不仅拥有包括多种通气模式和呼吸参数监测、呼吸力学的曲线波形以及趋势分析等,更加融合了新的监测参数例如跨肺压、膈肌电位、胸阻抗成像技术等,更加有利于使用者对病情进行综合判断,指导个体化机械通气治疗,从而改善患者预后。
5 结语
机械通气技术从诞生至今经历了天翻地覆的变化。未来的机械通气模式将会越来越全面,监测功能越来越强大,智能化程度越来越高。在临床工作中,医护人员应该掌握机械通气的治疗指征,了解不同疾病类型的机械通气特点,在纠正病因的基础上实施个体化呼吸治疗。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
初中生学习指导·提升版(2022年4期)2022-05-11
医疗卫生装备(2021年10期)2021-11-03
北京航空航天大学学报(2021年9期)2021-11-02
第二课堂(小学版)(2021年4期)2021-01-18
大众科学(2020年7期)2020-10-26
延安大学学报(医学科学版)(2019年4期)2019-12-27
小天使·六年级语数英综合(2018年1期)2018-10-08
中国实用医药(2018年7期)2018-03-20
中国当代医药(2018年28期)2018-01-15
