
风电变桨电机参数对控制系统影响分析及改进辨识方法
2019-08-05 07:20李辉谢翔杰刘行中姚然柴兆森夏桂森
电机与控制学报 2019年7期
关键词:风力发电
李辉 谢翔杰 刘行中 姚然 柴兆森 夏桂森
摘 要:针对风电机组变桨电机参数变化和负载不确定等带来变桨控制系统鲁棒性差的问题,分析变桨电机参数对控制系统的影响并提出参数辨识改进方法。首先,基于变桨电机控制系统中的复合磁链估算模型,针对不同参数的变化对磁链估算影响不同的问题,利用频率响应函数法(FRF)进行定量分析,获取影响较大的参数。其次,基于模型参考自适应辨识方法(MRAS),将辨识初始值作为补偿项,以克服电机转速和负载转矩变化对辨识结果的影响,建立转子时间常数Tr的在线辨识改进模型,提出考虑参数辨识的风电机组变桨控制策略。最后,对风电机组变桨电机及其控制系統进行动态仿真和样机实验。结果表明,Tr对变桨电机控制系统的影响较为明显,考虑在线辨识后的改进模型及控制策略具有更好的鲁棒性。
关键词:风力发电;变桨电机;矢量控制;参数辨识;模型参考自适应
中图分类号:TM 34
文献标志码:A
文章编号:1007-449X(2019)07-0009-10
Abstract:Uncertainties of parameters and load in pitch motor may lead to low robustness of pitch control system.Therefore,influence of motor parameters on control system was analyzed and an improved parameter identification method was presented.Firstly,based on the complex flux estimator in pitch control system,impact of motor parameters on the flux estimator were analyzed using frequency response functions (FRF),which could derive the key parameter.Secondly,based on the model reference adaptive system (MRAS),the initial value of identification was regarded as the compensation term to weaken the effect of variable motor speeds and load torques on identification result,then the improved online identification of the rotor time constant Tr and pitch control strategy considering parameter identification in wind turbine system were presented.Finally,simulation and prototype test of pitch motor control system were carried out.The result validates that Tr has a prominent impact on the pitch control system,and the improved identification model and control strategy considering online identification would be more robust.
Keywords:wind power generation; pitch motor; vector control; parameter identification; model reference adaptive system
0 引 言
近年来,变桨距风力发电机组由于能够有效利用风能并减少风力冲击,提高系统运行的可靠性,已成为目前的主流机型[1-3]。电动变桨系统可采用直流、永磁同步、感应电机等实现驱动,其中直流电机由于换向器、电刷等结构带来的低可靠性限制了其应用[4];永磁同步电机具有体积小、效率高、调速性能好等优点,但其成本高,且高温振动条件下永磁体存在退磁风险,可靠性较差;而三相感应电机因具有成本低、结构简单可靠、转矩大等优点[5],目前仍然广泛应用于风电机组的变桨驱动中[6]。然而,风湍流、风剪切、塔影效应、偏航偏差等因素会使风电机组的叶轮产生不均衡载荷[7],且变桨系统在轮毂中随着叶片的旋转而工作[8],势必会导致变桨电机负载转矩的不确定性,此外,变桨电机在运行过程中由于内部温度变化和磁路饱和等因素的影响,参数也存在不确定性。转矩和参数的不确定性将直接影响风电机组变桨控制的鲁棒性。因此,研究变桨电机参数辨识,寻求适应变桨电机参数变化和负载转矩不确定性的变桨控制策略对提高风电机组运行可靠性和稳定性具有重要的现实意义。
针对系统参数变化以及风速随机性等导致风电变桨控制系统鲁棒性差的问题,国内外学者提出了较多的控制策略[9-11]。文献[10]基于滑模控制理论,提出一种降低风电机组载荷的多目标变桨距控制策略,可有效地抑制机械振动并对风电机组动力学模型的参数变化具有较好的鲁棒性。文献[11]提出了一种基于模糊逻辑的变桨控制策略并与PID控制方法进行对比,结果表明模糊逻辑控制可以适应变桨系统的非线性,使得风电机组的输出功率保持平稳。然而,从现有文献对变桨距风电机组控制策略的研究来看,很少考虑到变桨电机参数变化对其控制性能的影响。针对感应电机转子磁场定向矢量控制中参数变化的问题,已有众多的辨识方法,其中模型参考自适应控制(model reference adaptive system,MRAS)因其易于实现、稳定可靠而得到了广泛地应用[12-15]。文献[12]证明了基于无功功率的转子电阻与转速MRAS在线辨识模型的稳定性,并建立了小信号模型分析定、转子电阻对磁场定向的敏感性,但是未涉及如转子时间常数等其他参数,也没有考虑负载转矩波动对辨识准确性的影响。文献[14]利用Popov超稳定性理论,分析了基于无功功率的MRAS转子时间常数在线辨识方法的稳定性,并研究了该辨识方法对所涉及电机参数的敏感性,但没有考虑到电机转速和负载转矩变化对辨识准确性的影响。因此,现有文献涉及的参数辨识方法是否适用于变桨电机的运行工况,还有待进一步研究,此外,也缺乏针对变桨电机参数辨识与变桨控制相结合的鲁棒控制策略的研究。
基于此,考虑风电变桨电机参数变化和负载不确定性的影响,本文提出一种适应变桨电机运行工况的参数辨识改进方法及相应的变桨控制策略。首先,利用频率响应函数法定量分析变桨电机不同参数的变化对控制系统中复合磁链估算的影响,获取影响较为明显的转子时间常数Tr。其次,基于模型参考自适应方法,考虑电机转速和负载转矩变化的情况,以辨识初始值作为补偿项,建立Tr在线辨识的改进模型并提出考虑参数辨识的风电机组变桨控制策略。最后,对变桨电机控制系统进行动态仿真和样机实验,验证改进模型和控制策略的有效性。
1 变桨电机参数变化对磁链估算的影响
1.1 变桨电机控制系统简介
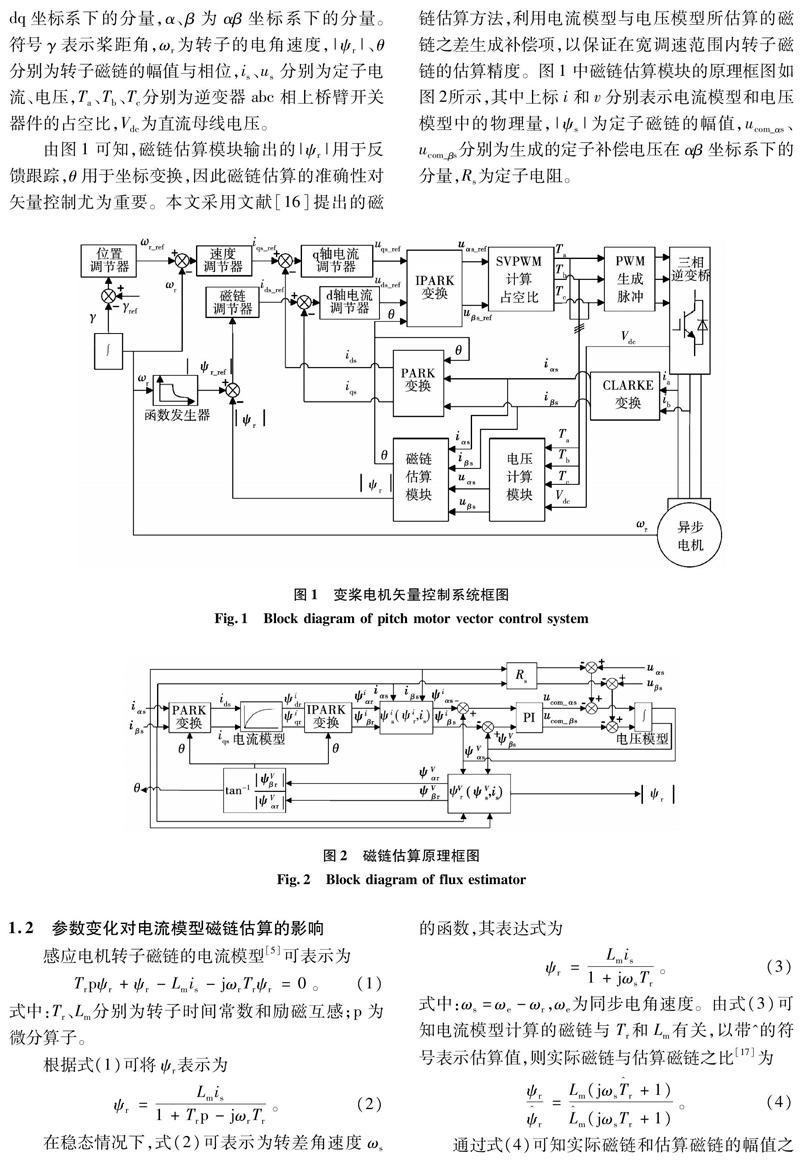
以感应电机为例的风电变桨控制系统如图1所示,其中控制环包括位置环、速度环、磁链环和电流环,脉冲占空比通过空间矢量脉宽调制(space vector pulse width modulation,SVPWM)计算得到,图中符号的下标ref代表各物理量的参考值,d、q分别表示dq坐标系下的分量,α、β为αβ坐标系下的分量。符号γ表示桨距角,ωr为转子的电角速度,|ψr |、θ分别为转子磁链的幅值与相位,is、us分别为定子电流、电压,Ta、Tb、Tc分别为逆变器abc相上桥臂开关器件的占空比,Vdc为直流母线电压。
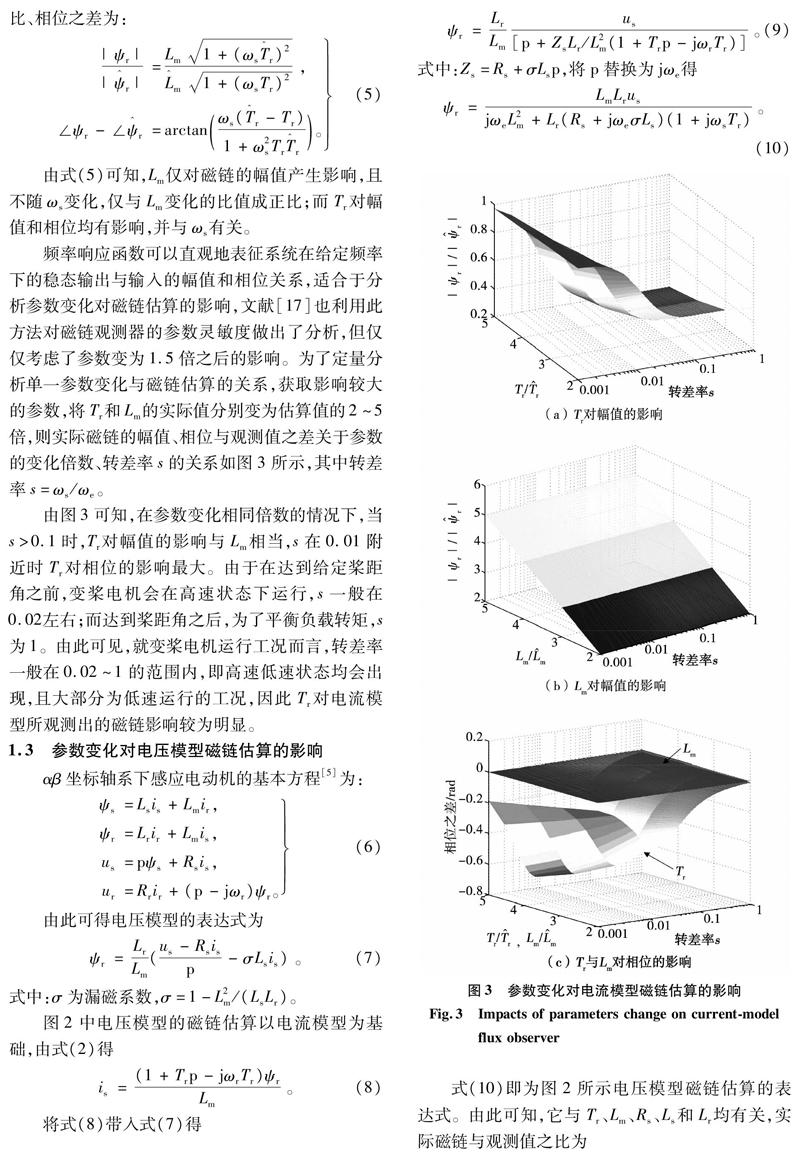
由图1可知,磁链估算模块输出的|ψr|用于反馈跟踪,θ用于坐标变换,因此磁链估算的准确性对矢量控制尤为重要。本文采用文献[16]提出的磁链估算方法,利用电流模型与电压模型所估算的磁链之差生成补偿项,以保证在宽调速范围内转子磁链的估算精度。图1中磁链估算模块的原理框图如图2所示,其中上标i和v分别表示电流模型和电压模型中的物理量,|ψs|为定子磁链的幅值,ucom_αs、ucom_βs分别为生成的定子补偿电压在αβ坐标系下的分量,Rs为定子电阻。
由式(5)可知,Lm仅对磁链的幅值产生影响,且不随ωs变化,仅与Lm变化的比值成正比;而Tr对幅值和相位均有影响,并与ωs有关。
频率响应函数可以直观地表征系统在给定频率下的稳态输出与输入的幅值和相位关系,适合于分析参数变化对磁链估算的影响,文献[17]也利用此方法对磁链观测器的参数灵敏度做出了分析,但仅仅考虑了参数变为1.5倍之后的影响。为了定量分析单一参数变化与磁链估算的关系,获取影响较大的参数,将Tr和Lm的实际值分别变为估算值的2~5倍,则实际磁链的幅值、相位与观测值之差关于参数的变化倍数、转差率s的关系如图3所示,其中转差率s=ωs/ωe。
由图3可知,在参数变化相同倍数的情况下,当s>0.1时,Tr对幅值的影响与Lm相当,s在0.01附近时Tr对相位的影响最大。由于在达到给定桨距角之前,变桨电机会在高速状态下运行,s一般在0.02左右;而达到桨距角之后,为了平衡负载转矩,s为1。由此可见,就变桨电机运行工况而言,转差率一般在0.02~1的范围内,即高速低速状态均会出现,且大部分为低速运行的工况,因此Tr对电流模型所观测出的磁链影响较为明显。
1.3 参数变化对电压模型磁链估算的影响
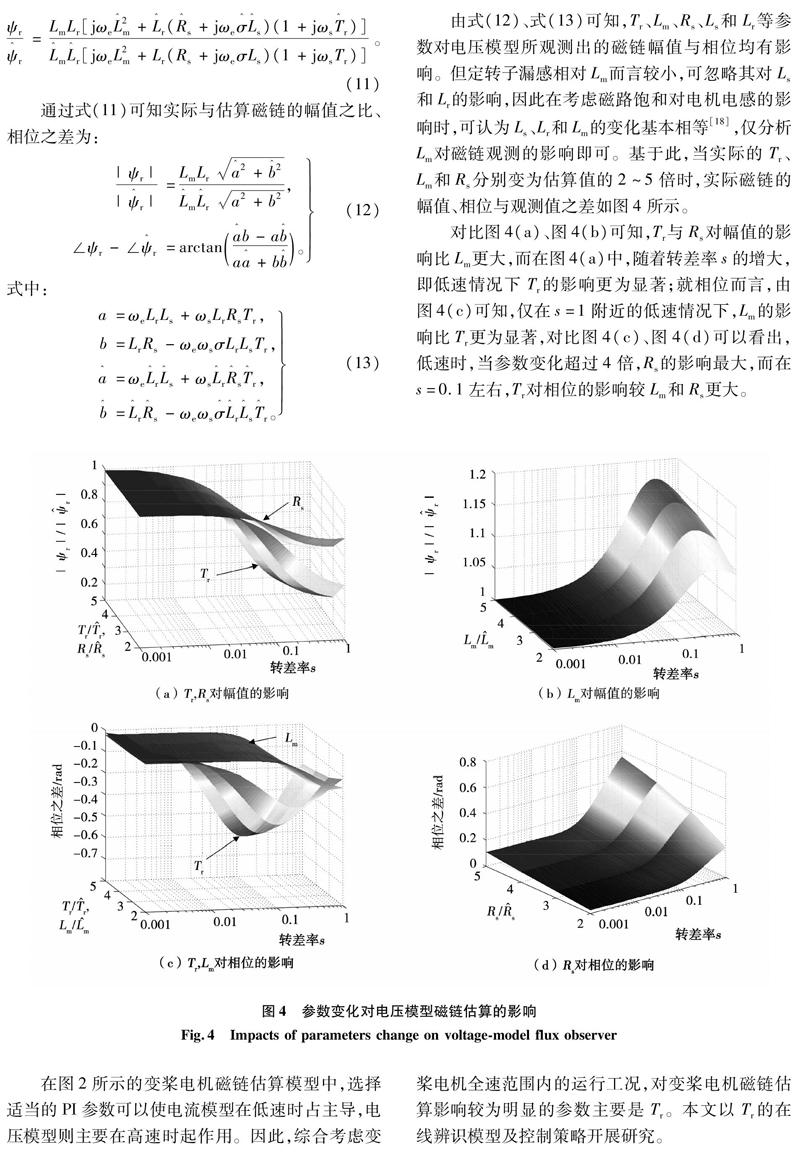
由式(12)、式(13)可知,Tr、Lm、Rs、Ls和Lr等参数对电压模型所观测出的磁链幅值与相位均有影响。但定转子漏感相对Lm而言较小,可忽略其对Ls和Lr的影响,因此在考虑磁路饱和对电机电感的影响时,可认为Ls、Lr和Lm的变化基本相等[18],仅分析Lm对磁链观测的影响即可。基于此,当实际的Tr、Lm和Rs分别变为估算值的2~5倍时,实际磁链的幅值、相位与观测值之差如图4所示。
对比图4(a)、图4(b)可知,Tr与Rs对幅值的影响比Lm更大,而在图4(a)中,随着转差率s的增大,即低速情况下Tr的影响更为显著;就相位而言,由图4(c)可知,仅在s=1附近的低速情况下,Lm的影响比Tr更为显著,对比图4(c)、图4(d)可以看出,低速时,当参数变化超过4倍,Rs的影响最大,而在s=0.1左右,Tr对相位的影响较Lm和Rs更大。
在图2所示的变桨电机磁链估算模型中,选择适当的PI参数可以使电流模型在低速时占主导,电压模型则主要在高速时起作用。因此,综合考虑变桨电机全速范围内的运行工况,对变桨电机磁链估算影响较为明显的参数主要是Tr。本文以Tr的在线辨识模型及控制策略开展研究。
2 转子时间常数在线辨识的改进模型
2.1 考虑初始值作为补偿项的辨识改进模型
利用Popov超稳定性定律推导自适应律,与转速估计[19]类似,以式(7)所示电压模型为参考模型,式(2)所示电流模型为可调模型,上标*表示标幺值,~表示可调模型,取比例加积分的自适应律为
在常规的MRAS模型中,辨识初始值一般取为额定值。由于转子磁场定向实现了解耦控制[5],随着变桨电机负载转矩的变化,参考模型计算的磁链会随之改变,转速的变化也会使电流模型的计算产生偏差,由此可知,若初始值仍保持不变,则会导致由式(14)辨识出的Tr变化。因此,在变桨电机转速与负载转矩不确定的情况下,仅将T~r(0)当作常数可能使辨识结果存在较大误差。为此,本文考虑将T~r(0)作为补偿项。
在两相同步旋转的dq轴系下有[5]
由于实际的控制系统均为离散系统,利用k-1时刻的数据计算k时刻的Tr,式(15)可以表示为
2.2 不同转速和负载转矩下的仿真对比验证
为了验证Tr辨识改进模型的有效性,本文对变桨电机在不同转速、不同负载转矩下的辨识效果进行仿真,并将结果与未改進的方法进行比较,仿真中变桨电机参数如表1所示,上一节分析参数变化对磁链估算的影响也是基于表1中的参数。
仿真中分别给定转速为0.97pu、0.5pu和0.2pu,负载转矩为额定值36 N·m,t=1 s时MRAS辨识模型开始作用,变桨电机Tr初始值为0.155 s,t=3 s时变为0.310 s,改进前后的辨识结果对比如图6所示。
对比图6(a)~图6 (c)可知,高速时改进前后的结果差别不大,但随着转速的降低,改进后的辨识精度有所提升。改进前后辨识结果的相对误差如表2所示。
由表2中的误差对比可知,改进后的辨识模型能够更好地适应电机参数和转速的变化。
考虑变桨电机的负载具有不确定性,在转速为0.2pu的情况下模拟负载转矩的变化,t=2 s时转矩突增为50 N·m,4 s时变为额定值36 N·m,改进前后的辨识结果如图7所示。
由图7可知,改进辨识模型可较好地抑制Tr随负载变化的波动,转矩为50 N·m时改进前后的辨识误差对比如表3所示。
由表3可知,转矩变化后,改进方法仍然能够准确辨识出实际的Tr。因此,改进的辨识模型可以更好地适应变桨电机负载的不确定性。
2.3 样机实验验证
图8所示为本文所用实验平台,其中控制算法采用TI公司的TMS320F28335 DSP芯片实现,PWM开关频率为10 kHz,电流环、速度环的控制周期分别为100 μs和1 ms。以直流电机作为负载,可通过调节其励磁以及电枢电流来改变转矩。由于实验条件限制,采用的感应电机为小功率电机,具体参数见表4,其中转子时间常数的额定值约为0.107 s。需要说明的是,前面所提的参数辨识改进方法并非针对特定的感应电机而言,因此,采用小功率电机并不影响参数辨识及控制的效果,实验结果也可与仿真相对应,进而验证理论的正确性。
由于变桨电机的Tr对控制系统的影响主要体现在低速段。因此在实验中给定转速0.2pu,提取1.6 s时间内的实验数据,其中0~0.8 s时负载为额定值,0.8~1.6 s時负载变为1.5倍额定值,得出加入改进、未改进辨识模型以及未加辨识3种情况下的效果如图9所示。
由图9(a)可知,未加辨识环节时,转速存在较大的振荡,且转矩增大后速度无法控制在0.2pu;加入未改进的辨识模型,负载转矩增大后转速控制效果仍不理想;改进的辨识模型可以使转速控制较好地适应负载转矩变化的情况。加入改进、未改进辨识模型以及未加辨识3种情况下转速控制的相对误差如表5所示,由此可知改进的辨识模型可以适应负载转矩的变化,使转速控制达到较好的效果。
图9(b)表明在感应电机的运行过程中,温度升高、磁路饱和等现象会使Tr相比额定值0.107 s发生一定的变化,改进的辨识模型能更准确地辨识出Tr的变化,使得整个变桨系统在受到参数和负载转矩变化后仍然能达到良好的控制效果。
3 考虑参数辨识的变桨控制策略
3.1 考虑转子时间常数辨识的变桨控制策略
将图5所示的改进辨识模型加入到图1的变桨电机控制系统中,构成如图10所示的考虑参数辨识后的风电变桨电机控制策略。其中辨识模块的输入为变桨电机定子电压uαs、uβs,定子电流iαs、iβs、ids、iqs,同步转速ωe以及转子转速ωr;输出的Tr作为磁链估算模块的输入,实时修正其中的参数Tr,使得估算出的磁链更加精确,有利于提高整个变桨系统的鲁棒性。
3.2 电机参数变化对变桨性能影响仿真
考虑到变桨电机负载转矩的不确定性,仿真初始在额定负载转矩下工作,4 s时突增为50 N·m,仿真时间设定为8 s。若不加入Tr辨识环节,在系统参数均为初始值和变桨电机Tr改为0.310 s 2种情况下,仿真得到变桨系统位置环与速度环的控制效果对比如图11所示。
从图11可以看出,将Tr改为初始值2倍后,电机在低速时带动50 N·m的负载转矩会出现转速振荡,导致位置环的控制出现一定波动与偏差,验证了感应电机转子磁场定向矢量控制系统对Tr的变化具有敏感性。加入未改进Tr辨识环节,由图6、图7的仿真结果可知,当Tr和负载转矩变化后,辨识结果仍然不准确,其控制效果与图11类似。而加入改进Tr辨识环节后,控制和辨识效果如图12所示。
由图12可知,变桨电机的Tr改变后,改进的辨识环节能够在电机转速及负载变化时精确得出Tr的实际值,以此作为磁链估算模块的输入,实时地修正输出磁链的幅值和相角,可以使风电变桨控制系统对电机Tr变化的敏感度降低,鲁棒性增强。
4 结 论
针对风电变桨电机参数变化和负载不确定性导致控制系统鲁棒性差的问题,提出了一种变桨电机参数辨识改进模型及其变桨控制策略。通过仿真和样机实验等验证了本文所提方法的有效性。主要结论有:
1)对磁链估算模型的理论分析与变桨电机控制策略的仿真分析表明,影响变桨系统性能的主要参数是变桨电机的转子时间常数Tr;
2)无论是变桨电机参数、转速还是负载转矩的变化,本文提出的Tr在线辨识改进模型都能够较准确地跟踪实际参数,使得电机的转速控制更有效。
3)考虑参数辨识后的变桨电机控制策略能够在一定程度上抑制变桨电机在低速时转速的振荡,提高整个变桨系统控制的鲁棒性。
参 考 文 献:
[1] 李辉,杨超,赵斌,等.风电机组电动变桨系统建模及运行特性评估与测试[J].电力系统自动化,2013,37(11):20.
LI Hui,YANG Chao,ZHAO Bin,et al.Modeling and operation performance evaluation and test of electric pitch system in wind turbine generator system[J].Automation of Electric Power System,2013,37(11):20.
[2] 史运涛,侯彦娇,孙德辉,等.风能转换系统随机建模与H∞容错控制[J].电机与控制学报,2015,19(3):100.
SHI Yuntao,HOU Yanjiao,SUN Dehui,et al.Stochastic modelling and H∞ fault tolerance control of WECS[J].Electric Machines and Control,2015,19(3):100.
[3] 杨俊友,王海鑫,井艳军,等.并网型风电机组模拟控制策略[J].电机与控制学报,2016,20(3):43.
YANG Junyou,WANG Haixin,JING Yanjun,et al.Imitation control strategy of gridconnected wind power system[J].Electric Machines and Control,2016,20(3):43.
[4] 周俊宇,邓文浪.永磁同步电机风力发电变桨控制系统设计[J].中南林业科技大学学报,2011,31(9):165.
ZHOU Junyu,DENG Wenlang.Design of pitch controlled system of wind turbines based on PMSM[J].Journal of Central South University of Forest & Technology,2011,31(9):165.
[5] 高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京: 清华大学出版社,2005.
[6] 李辉,杨超,赵斌,等.考虑变桨驱动电机特性的风电机组运行性能仿真[J].电力系统保护与控制,2011,39(18):26.
LI Hui,YANG Chao,ZHAO Bin,et al.Simulation on the operational performances of wind turbine generator system considering the variable pitch drive motor characteristics[J].Power System Protection and Control,2011,39(18):26.
[7] BURTON T.风能技术[M].武鑫,译.北京:科学出版社,2014.
[8] 李辉,杨超,李学伟,等.风机电动变桨系统状态特征参量挖掘及异常识别[J].中国电机工程学报,2014,34(12):1922.
LI Hui,YANG Chao,LI Xuewei,et al.Conditions characteristic parameters mining and outlier identification for electric pitch system of wind turbine[J].Proceedings of the CSEE,2014,34(12):1922.
[9] HWAS A,KATEBI R.Wind turbine control using PI pitch angle controller[J].IFAC Proceedings Volumes,2012,45(3):241.
[10] 肖帅,杨耕,耿华.抑制载荷的大型风电机组滑模变桨距控制[J].电工技术学报,2013,28(7):145.
XIAO Shuai,YANG Geng,GENG Hua.Slidingmode pitch control strategy for large wind turbines to reduce loads[J].Transactions of China Electrotechnical Society,2013,28(7):145.
[11] VAN T L,NGUYEN T H,LEE D C.Advanced pitch angle control based on fuzzy logic for variablespeed wind turbine systems[J].IEEE Transactions on Energy Conversion,2015,30(2):578.
[12] MAITI S,CHAKRABORTY C,HORI Y,et al.Model reference adaptive controllerbased rotor resistance and speed estimation techniques for vector controlled induction motor drive utilizing reactive power[J].IEEE Transactions on Industrial Electronics,2008,55(2):594.
[13] 徐占國,邵诚,冯冬菊.基于模型参考自适应的感应电机励磁互感在线辨识新方法[J].中国电机工程学报,2010,30(3):71.
XU Zhanguo,SHAO Cheng,FENG Dongju.Online identification of induction motor mutual inductance based on model reference adaptive system[J].Proceedings of the CSEE,2010,30(3):71.
[14] 王高林,杨荣峰,张家皖,等.一种感应电机转子时间常数MRAS的在线辨识方法[J].电工技术学报,2012,27(4):48.
WANG Gaolin,YANG Rongfeng,ZHANG Jiawan,et al.Rotor time constant online estimation of induction motors based on MRAS[J].Transactions of China Electrotechnical Society,2012,27(4):48.
[15] CAO Pengpeng,ZHANG Xing,YANG Shuying.A unifiedmodelbased analysis of MRAS for online rotor time constant estimation in an induction motor drive[J].IEEE Transactions on Industrial Electronics,2017,64(6):4361.
[16] LASCU C,BOLDEA I,BLAABJERG F.A modified direct torque control for induction motor sensorless drive [J].IEEE Transactions on Industry Applications,2000,36(1):124.
[17] JANSEN P L,LORENZ R D.A physically insightful approach to the design and accuracy assessment of flux observers for field oriented induction machine drives [J].IEEE Transactions on Industry Applications,2002,30(1):103.
[18] 徐小增,李葉松,秦忆.矢量控制感应电机参数变化的影响研究[J].华中科技大学学报(自然科学版),2003,31(7):44.
XU Xiaozeng,LI Yesong,QIN Yi.Effect of parameters variety on vectorcontrolled induction motor [J].Journal of Huazhong University of Science and Technology (Nature Science Edition),2003,31(7):44.
[19] LEI Wang,LI Yinghui,LEI Xiao.Sliding mode variablestructure MRAS speed identification for induction motor direct torque control system[C]//2009 ISECS International Colloquium on Computing,Communication,Control,and Management,August 8-9,2009,Sanya,China.2009: 9-62.
(编辑:邱赫男)
猜你喜欢
东方教育(2016年13期)2017-01-12
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年29期)2016-12-27
山东工业技术(2016年23期)2016-12-23
中国市场(2016年32期)2016-12-06
科技视界(2016年16期)2016-06-29
科技视界(2016年8期)2016-04-05
科技视界(2015年25期)2015-09-01
